1.本发明涉及行车安全技术领域,尤其是一种考虑制动力衰减的车辆主动防撞控制方法。
背景技术:
2.随着汽车保有量的快速增长,道路交通安全问题已经成为各国政府和社会关注的重要问题。美国国家高速公路安全委员会(nhtsa)的调研表明,在道路交通致死事故中,因驾驶员过失造成的约占90%,而因车辆故障造成的仅占约3%,发展先进的车辆主动安全系统已成为现代道路交通的迫切需求。车辆的主动避撞方法的研究是车辆主动安全系统的重要方面之一,现有主动避撞控制方法未能考虑制动系统的制动力衰减情况,难以满足制动盘升温或者磨损情况下的车辆主动安全防护需求。
技术实现要素:
3.本发明人针对上述问题及技术需求,提出了一种考虑制动力衰减的车辆主动防撞控制方法,本发明的技术方案如下:
4.一种考虑制动力衰减的车辆主动防撞控制方法,包括:
5.步骤1,确定当前车辆的行驶速度、每个车轮的制动盘热衰减系数、储气罐压力和前方路面峰值附着系数;
6.步骤2,根据当前车辆的行驶速度、每个车轮的制动盘热衰减系数、储气罐压力和前方路面峰值附着系数得到当前气制动系统的最大制动减速度;
7.步骤3,确定当前车辆的前方障碍物运动速度和前方障碍物与当前车辆的距离;
8.步骤4,根据当前车辆的行驶速度、前方障碍物运动速度、前方障碍物与当前车辆的距离和前方路面峰值附着系数得到当前气制动系统的期望制动减速度,根据期望制动减速度和最大制动减速度判断当前车辆是否有碰撞风险,若有风险,进入步骤5,否则返回步骤1;
9.步骤5,计算当前气制动系统的期望制动力矩,并将期望制动力矩反馈给气制动系统执行;
10.步骤6,重复步骤1至5。
11.进一步的,步骤1具体包括:
12.利用红外传感器检测当前车辆每个车轮的制动盘温度,再通过公式计算得到每个车轮的制动盘热衰减系数,其中ij∈{fl,fr,bl,br},ij=fl表示左前轮,ij=fr表示右前轮,ij=bl表示左后轮,ij=br表示右后轮,σ
ij
为对应车轮的制动盘热衰减系数,t
ij
为对应车轮的制动盘温度,k
t1
至k
t5
分别为制动盘的热衰减拟合系数、与制动盘材料及结构有关;
13.利用气压传感器检测当前车辆的储气罐压力;
14.利用can总线采集当前车辆的行驶速度;
15.利用摄像头采集前方路面图像并通过隐马尔可夫模型算法确定前方路面峰值附着系数。
16.进一步的,得到当前气制动系统的最大制动减速度,包括:
17.根据行驶速度计算得到路面摩擦阻力f
r
和迎风阻力f
w
;
18.根据储气罐压力和每个车轮的制动盘热衰减系数计算得到当前气制动系统提供的最大制动力矩m
lim
;
19.根据当前气制动系统提供的最大制动力矩m
lim
和前方路面峰值附着系数计算得到当前气制动系统提供的最大制动力f
b_max
;
20.按照公式计算得到当前气制动系统的最大制动减速度,m为车辆质量。
21.进一步的,根据当前气制动系统提供的最大制动力矩m
lim
和前方路面峰值附着系数计算得到当前气制动系统提供的最大制动力f
b_max
,包括:
22.按照公式计算得到当前气制动系统提供的最大制动力,r
r
为车轮半径,m为车辆质量,g为重力加速度,为前方路面峰值附着系数。
23.进一步的,根据储气罐压力和每个车轮的制动盘热衰减系数计算得到当前气制动系统提供的最大制动力矩m
lim
,包括:
24.根据储气罐压力和每个车轮的制动盘热衰减系数计算得到当前气制动系统提供的每个车轮的最大制动力矩m
fl
、m
fr
、m
bl
、m
br
;
25.按照公式计算得到当前气制动系统提供的最大制动力矩,β为前轮制动力分配系数,m
fl
、m
fr
、m
bl
、m
br
分别为当前气制动系统提供的左前轮、右前轮、左后轮、右后轮的最大制动力矩。
26.进一步的,当前气制动系统提供的每个车轮的最大制动力矩m
fl
、m
fr
、m
bl
、m
br
为:
[0027][0028]
其中,μ为制动盘与衬块之间的摩擦系数,p
t
为储气罐压力,σ
fl
、σ
fr
、σ
bl
、σ
br
分别为左前轮、右前轮、左后轮、右后轮的制动盘热衰减系数,n为制动缸数量,s为制动缸横截面积,r为制动盘有效制动半径。
[0029]
进一步的,根据行驶速度计算得到路面摩擦阻力f
r
和迎风阻力f
w
,包括按照如下公式计算:
[0030][0031]
其中,f为滚动摩擦系数,v为车辆行驶速度,m为车辆质量,g为重力加速度,c
d
为车辆风阻系数,a
a
为车辆迎风面积,ρ为空气密度。
[0032]
进一步的,步骤4中的根据当前车辆的行驶速度、前方障碍物运动速度、前方障碍物与当前车辆的距离和前方路面峰值附着系数得到当前气制动系统的期望制动减速度,包括按照如下公式计算:
[0033][0034]
其中,v为当前车辆的行驶速度,s
o
为前方障碍物与当前车辆的距离,v
o
为前方障碍物运动速度,为前方路面峰值附着系数,g为重力加速度值,s
safe
为预留安全距离。
[0035]
进一步的,根据期望制动减速度和最大制动减速度判断当前车辆是否有碰撞风险,包括按照如下公式判定:
[0036][0037]
其中,l
a
为当前车辆的碰撞风险判定级别,0为无风险,1为有风险;a
des
为当前气制动系统的期望制动减速度,a
max
为当前气制动系统的最大制动减速度。
[0038]
进一步的,步骤5的计算当前气制动系统所需的制动力矩,包括按照如下公式计算:
[0039][0040]
其中,m
des
为当前气制动系统的期望制动力矩,a
des
为当前气制动系统的期望制动减速度,a
max
为当前气制动系统的最大制动减速度,f
r
为路面摩擦阻力,f
w
为迎风阻力,m为车辆质量,r
r
为车轮半径。
[0041]
本发明的有益技术效果是:
[0042]
本发明公开了一种考虑制动力衰减的车辆主动防撞控制方法,能够对车辆行驶过程中气制动系统的制动力衰减情况进行实时检测,综合车辆气制动系统状态、车辆行驶状态信息以及环境障碍物信息对车辆安全性进行合理判断并输出所需的制动力矩给气制动
系统,避免了由于制动盘磨损、热失效等因素导致的主动制动控制方法失效,为车辆主动防撞提供更加准确的控制方法,提高了制动系统的安全性与可靠性。
附图说明
[0043]
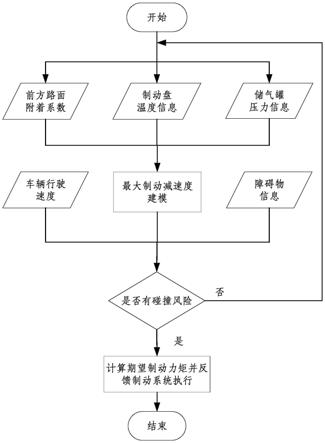
图1是本发明的考虑制动力衰减的车辆主动防撞控制方法的方法流程示意图。
具体实施方式
[0044]
下面结合附图对本发明的具体实施方式做进一步说明。
[0045]
本技术公开了一种考虑制动力衰减的车辆主动防撞控制方法,请结合图1,主要包括如下步骤:
[0046]
步骤1:确定当前车辆的行驶速度、每个车轮的制动盘热衰减系数、储气罐压力和前方路面峰值附着系数,具体包括利用红外传感器检测当前车辆每个车轮的制动盘温度,再通过公式计算得到每个车轮的制动盘热衰减系数,其中ij∈{fl,fr,bl,br},ij=fl表示左前轮,ij=fr表示右前轮,ij=bl表示左后轮,ij=br表示右后轮,σ
ij
为对应车轮的制动盘热衰减系数,t
ij
为对应车轮的制动盘温度信息,k
t1
至k
t5
分别为制动盘的热衰减拟合系数、与制动盘材料及结构有关;利用气压传感器检测当前车辆的储气罐压力;利用can总线采集当前车辆的行驶速度;利用摄像头采集前方路面图像并通过隐马尔可夫模型算法确定前方路面峰值附着系数,本实施例中摄像头安装在前防风玻璃中间靠底部的位置。
[0047]
步骤2:根据步骤1确定的当前车辆的行驶速度、每个车轮的制动盘热衰减系数、储气罐压力和前方路面峰值附着系数得到当前气制动系统的最大制动减速度,具体包括:
[0048]
(1)根据每个车轮的制动盘热衰减系数和储气罐压力计算当前气制动系统提供的每个车轮的最大制动力矩,具体按照如下公式计算:
[0049][0050]
其中,m
fl
、m
fr
、m
bl
、m
br
分别为当前气制动系统提供的左前轮、右前轮、左后轮、右后轮的最大制动力矩,μ为制动盘与衬块之间的摩擦系数,p
t
为储气罐压力,σ
fl
、σ
fr
、σ
bl
、σ
br
分别为左前轮、右前轮、左后轮、右后轮的制动盘热衰减系数,n为制动缸数量,s为制动缸横截面积,r为制动盘有效制动半径。
[0051]
(2)为了防止由于制动力矩差导致的车辆跑偏现象,以当前气制动系统热衰减系数最小的制动轮缸为基准反推当前气制动系统可以提供的最大制动力矩m
lim
,具体按照如下公式计算:
[0052][0053]
其中,β为前轮制动力分配系数。
[0054]
(3)根据当前气制动系统提供的最大制动力矩m
lim
计算当前气制动系统提供的最大制动力f
b_max
。在具体工况中,若前方路面峰值附着系数较低,则此时前方路面峰值附着系数为最大制动力的有效约束,若制动盘热衰减状态较严重,则制动力矩成为最大制动力的有效约束,具体按照如下公式计算:
[0055][0056]
其中,r
r
为车轮半径,m为车辆质量,g为重力加速度,为前方路面峰值附着系数。
[0057]
(4)根据车辆行驶速度计算得到路面摩擦阻力f
r
和迎风阻力f
w
,具体按照如下公式计算:
[0058][0059]
其中,f为滚动摩擦系数,v为车辆行驶速度,m为车辆质量,g为重力加速度,c
d
为车辆风阻系数,a
a
为车辆迎风面积,ρ为空气密度。
[0060]
(5)根据路面摩擦阻力f
r
、迎风阻力f
w
和当前气制动系统提供的最大制动力f
b_max
计算当前气制动系统提供的最大制动减速度a
max
,按照如下公式计算:
[0061][0062]
其中,m为车辆质量。
[0063]
步骤3:通过雷达获取所述当前车辆的前方障碍物运动速度和前方障碍物与当前车辆的距离。
[0064]
步骤4:根据当前车辆的行驶速度、前方障碍物运动速度、前方障碍物与当前车辆的距离和前方路面峰值附着系数得到当前气制动系统的期望制动减速度,根据期望制动减速度和最大制动减速度判断当前车辆是否有碰撞风险,若有风险,进入步骤5,否则返回步骤1,具体包括:
[0065]
(1)根据当前车辆行驶速度、前方障碍物运动速度、前方障碍物与当前车辆的距离和前方路面峰值附着系数计算得到当前气制动系统的期望制动减速度,按照如下公式计算:
[0066][0067]
其中,a
des
为当前气制动系统的期望制动减速度,v为当前车辆的行驶速度,s
o
为前方障碍物与当前车辆的距离,v
o
为前方障碍物运动速度,为前方路面峰值附着系数,g为重力加速度值,s
safe
为预留安全距离。
[0068]
(2)根据期望制动减速度和最大制动减速度判定当前车辆的碰撞风险,具体判定方法如下:
[0069][0070]
其中,l
a
为当前车辆的碰撞风险判定级别,0为无风险,1为有风险。
[0071]
步骤5:计算当前气制动系统的期望制动力矩,并将期望制动力矩反馈给气制动系统执行,期望制动力矩具体按照如下公式计算:
[0072][0073]
其中,m
des
为当前气制动系统的期望制动力矩,a
des
为当前气制动系统的期望制动减速度,a
max
为当前气制动系统的最大制动减速度,f
r
为路面摩擦阻力,f
w
为迎风阻力,m为车辆质量,r
r
为车轮半径。
[0074]
步骤6:重复步骤1至5。
[0075]
以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。