1.本实用新型属于垃圾箱技术领域,更具体地说,特别涉及一种带有自动破袋及自动压缩的垃圾箱。
背景技术:
2.垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。
3.例如申请号:本发明公开了一种具有垃圾分类指导功能的生活垃圾分类桶,包括垃圾桶主体,所述垃圾桶主体的内部设有弹出装置、驱动装置、封口装置、动作放大装置和加压装置;通过动作放大装置、加压装置、压实装置的配合对垃圾袋内部存储的可回收垃圾进行排气和压实处理,减小了可回收垃圾的体积,增加了该生活垃圾分类桶的存储率,该生活垃圾分类桶不容易被可回收垃圾填满,降低了转移可回收垃圾的频率,不仅减少了环卫工作人员的工作量,而且降低了垃圾处理的成本,通过弹出装置,方便环卫工作人员将该生活垃圾分类桶内的可回收垃圾取出,进一步减少了环卫工作人员的工作量,提高了该生活垃圾分类桶的实用性。
4.基于上述专利的检索,以及结合现有技术中的设备发现,类似于上述申请的垃圾箱目前还存在以下几点不足:
5.1、垃圾投放时,垃圾一般装载塑料袋内,但现垃圾桶并不具备垃圾与垃圾袋的分离操作,无法实现垃圾袋与垃圾的分类投放;
6.2、垃圾投放时,当垃圾满桶时,无法继续阻止垃圾的投放,导致垃圾桶内垃圾溢出,导致垃圾桶周围环境被污染;
7.3、当垃圾满桶时,因垃圾并未被压实,使得垃圾桶内还存有部分存储空间,但现垃圾桶并不具备垃圾压缩功能,导致垃圾桶内空间无法得到最大限度的利用。
8.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种带有自动破袋及自动压缩的垃圾箱,以期达到更具有更加实用价值性的目的。
技术实现要素:
9.为了解决上述技术问题,本实用新型提供一种带有自动破袋及自动压缩的垃圾箱,以解决现有的垃圾箱不具备垃圾与垃圾袋的分离操作,无法实现垃圾袋与垃圾的分类投放、垃圾满桶时,无法继续阻止垃圾的投放且垃圾桶也并不具备垃圾压缩功能的问题。
10.本实用新型一种带有自动破袋及自动压缩的垃圾箱的目的与功效,由以下具体技术手段所达成:
11.一种带有自动破袋及自动压缩的垃圾箱,包括垃圾箱,所述垃圾箱整体呈矩形壳体结构,垃圾箱包括有:垃圾桶临时放置口,垃圾桶临时放置口呈矩形口结构,垃圾桶临时
放置口共设置有四处,四处垃圾桶临时放置口呈均匀分布状开设于垃圾箱前端面下侧方并与垃圾箱内腔相连通;垃圾投放口a,垃圾投放口a呈方形口结构,垃圾投放口a共设置有两处,两处垃圾投放口a呈均匀分布状开设于垃圾箱前端面上侧方并与垃圾箱内腔相连通;两处垃圾投放口a分别与从左侧排列的第一处垃圾桶临时放置口和第三处垃圾桶临时放置口位置相对并相互连通;垃圾投放口b,垃圾投放口b呈方形口结构,垃圾投放口b共设置有两处,两处垃圾投放口b呈均匀分布状开设于垃圾箱前端面上侧方,且两处垃圾投放口b与两处垃圾投放口a呈间隔状分布;两处垃圾投放口a分别与从左侧排列的第二处垃圾桶临时放置口和第四处垃圾桶临时放置口位置相对并相互连通;位于左侧方的垃圾投放口a和垃圾投放口b相连通,位于右侧方的垃圾投放口a和垃圾投放口b相连通。
12.进一步的,所述垃圾箱包括有:凹型固定板,凹型固定板呈凹型结构,凹型固定板共设置有两块,两块凹型固定板分别固定安装于两块方形延伸板内凹端顶侧;往复驱动电机,往复驱动电机共设置有两组,两组往复驱动电机分别固定安装于凹型固定板内凹端部位,往复驱动电机与控制箱电性相连;主动齿轮,主动齿轮共设置有两块,两块主动齿轮位于两块凹型固定板正下方,两块主动齿轮与两组往复驱动电机转轴键连接;转动辅助件,转动辅助件为轴承,转动辅助件共设置有两组,两组转动辅助件分别固定安装于两块延伸筒外周面底端;从动齿轮圈,从动齿轮圈共设置有两块,两块从动齿轮圈分别固定安装于两组转动辅助件上,从动齿轮圈与主动齿轮相啮合。
13.进一步的,所述垃圾箱包括有:延伸板,延伸板设置有两块,两块延伸板分别固定安装于两块从动齿轮圈上;滑轨,滑轨共设置有两组,两组滑轨分别固定安装于两块延伸板顶端面;滑块,滑块共设置有两组,两组滑块分别滑动安装于两组滑轨上;承载板,承载板呈l型结构,承载板共设置有两块,两块承载板分别固定安装于两组滑块上;电动缸,电动缸共设置有两组,两组电动缸分别固定安装于延伸板上,且电动缸活塞端与承载板固定相连接,电动缸与控制箱电性相连。
14.进一步的,所述垃圾箱包括有:切割驱动电机,切割驱动电机共设置有两组,两组切割驱动电机分别固定安装于两块承载板上,且切割驱动电机与控制箱电性相连;切割刀片,切割刀片共设置有两块,两块切割刀片分别位于两块承载板下侧方部位,且切割驱动电机的转轴端与切割刀片轴心部位固定相连接;切割刀片位置与切割移动槽口位置相对应;电动缸活塞端收纳状态下,切割刀片位于切割移动槽口外侧,电动缸活塞端伸展状态下,切割刀片切割端位于延伸筒内腔部位。
15.进一步的,所述垃圾箱包括有:垃圾托盘,垃圾托盘共设置有两块,两块垃圾托盘呈对称状设置于延伸筒底部开口端部位;转轴,转轴共设置有两根,两根转轴分别与两块垃圾托盘固定相连接;两块垃圾托盘闭合状态下将延伸筒底部开口端部位闭合;闭合驱动电机,闭合驱动电机共设置有两组,两组闭合驱动电机固定安装于从左侧方排列的第二处垃圾桶临时放置口及第四处垃圾桶临时放置口内端顶部,闭合驱动电机与转轴固定相连接,闭合驱动电机与控制箱电性相连;电磁铁,电磁铁共设置有两组,两组电磁铁内嵌安装于两块垃圾托盘上,电磁铁与控制箱电性相连。
16.进一步的,所述垃圾箱包括有:翻转门,翻转门共设置有四组,四组翻转门分别转动连接于四处垃圾桶临时放置口开口端部位,翻转门闭合状态下,翻转门将垃圾桶临时放置口完全遮掩闭合;防夹挡板,防夹挡板呈矩形板结构,防夹挡板共设置有四块,四块防夹
挡板分别设置于两处垃圾投放口a及两处垃圾投放口b开口端底侧部位,且防夹挡板通过复位弹簧与垃圾投放口a及垃圾投放口b开口端部位相连接;垃圾投放口翻盖,垃圾投放口翻盖呈矩形板结构,垃圾投放口翻盖共设置有四块,四块垃圾投放口翻盖分别设置于两处垃圾投放口a及两处垃圾投放口b开口端顶侧部位,垃圾投放口翻盖与垃圾投放口a及垃圾投放口b转动相连接;电动推杆,电动推杆共设置有四组,四组电动推杆固定安装于两处垃圾投放口a及两处垃圾投放口b内端,且四组电动推杆分别与四块垃圾投放口翻盖相连接。
17.进一步的,所述垃圾箱包括有:控制箱,控制箱设置于垃圾箱内部,且控制箱与电动推杆电性相连;提示灯,提示灯共设置有四组,四组提示灯分别内嵌安装于垃圾箱前端面相对于两处垃圾投放口a及两处垃圾投放口b开口端上侧方部位,且提示灯与控制箱电性相连;按钮,按钮共设置有四组,四组按钮分别内嵌安装于垃圾箱前端面相对于两处垃圾投放口a及两处垃圾投放口b开口端下侧方部位,且按钮与控制箱电性相连;人体红外线感应探头,人体红外线感应探头共设置有四组,四组人体红外线感应探头分别内嵌安装于垃圾箱前端面相对于两处垃圾投放口a及两处垃圾投放口b开口端下侧方部位,且人体红外线感应探头与控制箱电性相连;扬声器,扬声器设置于垃圾箱内部,且扬声器与控制箱电性相连。
18.进一步的,所述垃圾箱包括有:垃圾压缩杆,垃圾压缩杆共设置有两组,两组垃圾压缩杆分别设置于两处垃圾投放口a内端顶面,且垃圾压缩杆与控制箱电性相连;两组垃圾压缩杆底端均设置有垃圾压缩板,且两组垃圾压缩杆位置与垃圾桶临时放置口内垃圾桶位置相对;桶满感应探头,桶满感应探头共设置有四组,四组桶满感应探头分别设置于四处垃圾桶临时放置口内部顶侧部位,且桶满感应探头位置与垃圾桶临时放置口内垃圾桶顶部开口端位置相对,桶满感应探头与控制箱电性相连。
19.进一步的,所述垃圾箱包括有:电动螺杆驱动组件a,电动螺杆驱动组件a共设置有两组,两组电动螺杆驱动组件a分别设置于位于左侧方的垃圾投放口a和垃圾投放口b内部及位于右侧方的垃圾投放口a和垃圾投放口b内部,电动螺杆驱动组件a与控制箱电性相连;电动螺杆驱动组件b,电动螺杆驱动组件b共设置有两组,两组电动螺杆驱动组件b传动连接在两组电动螺杆驱动组件a上,电动螺杆驱动组件b与控制箱电性相连;机械爪,机械爪共设置有两组,两组机械爪分别安装于两组电动螺杆驱动组件b上,且机械爪与控制箱电性相连;机械爪限位开关,机械爪限位开关共设置有两组,两组机械爪限位开关分别设置于两组机械爪抓握端内端顶侧,机械爪限位开关与控制箱电性相连。
20.进一步的,所述垃圾箱包括有:方形延伸板,方形延伸板共设置有两块,两块方形延伸板分别固定设置于两处垃圾投放口b内端底部,方形延伸板将垃圾投放口b与垃圾桶临时放置口分隔;垃圾投放孔位,垃圾投放孔位呈圆形孔结构,垃圾投放孔位共设置有两处,两处垃圾投放孔位分别开设于两块方形延伸板顶端面中心部位连通垃圾投放口b与垃圾桶临时放置口;延伸筒,延伸筒呈圆筒结构,延伸筒共设置有两块,两块延伸筒分别固定安装于两处垃圾投放孔位内,延伸筒顶端面与方形延伸板顶端面处于同一水平面;切割移动槽口,切割移动槽口呈优弧圆缺槽结构,切割移动槽口共设置有两处,两处切割移动槽口分别开设于两块延伸筒外周面上。
21.与现有技术相比,本实用新型具有如下有益效果:
22.本实用新型通过电动螺杆驱动组件a、电动螺杆驱动组件b、机械爪同切割刀片可在垃圾破袋的同时实现垃圾袋与垃圾的分离操作,可实现将垃圾袋与垃圾分别投放,实现
垃圾分类功能。
23.本实用新型通过桶满感应探头的设置,可实时对垃圾桶内垃圾进行监控,当满桶后,对应位置的垃圾投放口翻盖将不会打开,避免桶满后垃圾的继续投放,避免垃圾溢出垃圾桶导致污染垃圾桶周围环境。
24.本实用新型通过垃圾压缩杆及垃圾压缩板的设置,可在满桶时,实现对垃圾桶内垃圾的压缩,以压实垃圾桶内的垃圾,展露垃圾桶内剩余的存储空间,以最大限度的利用垃圾桶内的存储空间。
25.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
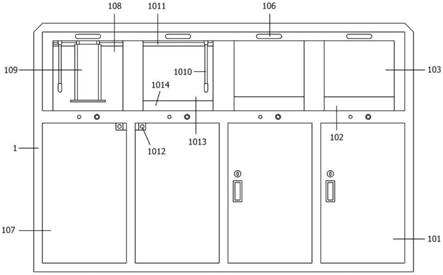
26.图1是本实用新型的主视结构示意图。
27.图2是本实用新型的图1中左侧方的翻转门和垃圾投放口翻盖去除状态下结构示意图。
28.图3是本实用新型的垃圾投放口a和垃圾投放口b内部剖视局部放大结构示意图。
29.图4是本实用新型的方形延伸板部位局部剖视放大结构示意图。
30.图5是本实用新型的方形延伸板底部局部剖视放大结构示意图。
31.图6是本实用新型的垃圾投放孔位部位局部放大结构示意图。
32.图7是本实用新型的系统框图。
33.图中,部件名称与附图编号的对应关系为:
34.1、垃圾箱;
35.101、翻转门;102、防夹挡板;103、垃圾投放口翻盖;104、按钮;105、人体红外线感应探头;106、提示灯;107、垃圾桶临时放置口;108、垃圾投放口a;109、垃圾压缩杆;
36.1010、电动推杆;1011、电动螺杆驱动组件a;1012、桶满感应探头;1013、垃圾投放口b;1014、方形延伸板;1015、电动螺杆驱动组件b;1016、机械爪;1017、机械爪限位开关;1018、延伸筒;1019、切割移动槽口;
37.1020、凹型固定板;1021、往复驱动电机;1022、主动齿轮;1023、从动齿轮圈;1024、延伸板;1025、滑轨;1026、滑块;1027、电动缸;1028、承载板;1029、切割驱动电机;
38.1030、切割刀片;1031、垃圾投放孔位;1032、转动辅助件;1033、垃圾托盘;1034、转轴;1035、闭合驱动电机;1036、电磁铁;1037、控制箱;1038、扬声器。
具体实施方式
39.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
40.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能
理解为指示或暗示相对重要性。
41.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
42.实施例:
43.如附图1至附图7所示:
44.本实用新型提供一种带有自动破袋及自动压缩的垃圾箱,包括垃圾箱1,垃圾箱1整体呈矩形壳体结构,垃圾箱1包括有:如附图2所示,垃圾桶临时放置口107,垃圾桶临时放置口107呈矩形口结构,垃圾桶临时放置口107共设置有四处,四处垃圾桶临时放置口107呈均匀分布状开设于垃圾箱1前端面下侧方并与垃圾箱1内腔相连通;如附图2所示,垃圾投放口a108,垃圾投放口a108呈方形口结构,垃圾投放口a108共设置有两处,两处垃圾投放口a108呈均匀分布状开设于垃圾箱1前端面上侧方并与垃圾箱1内腔相连通;两处垃圾投放口a108分别与从左侧排列的第一处垃圾桶临时放置口107和第三处垃圾桶临时放置口107位置相对并相互连通;如附图2所示,垃圾投放口b1013,垃圾投放口b1013呈方形口结构,垃圾投放口b1013共设置有两处,两处垃圾投放口b1013呈均匀分布状开设于垃圾箱1前端面上侧方,且两处垃圾投放口b1013与两处垃圾投放口a108呈间隔状分布;两处垃圾投放口a108分别与从左侧排列的第二处垃圾桶临时放置口107和第四处垃圾桶临时放置口107位置相对并相互连通;位于左侧方的垃圾投放口a108和垃圾投放口b1013相连通,位于右侧方的垃圾投放口a108和垃圾投放口b1013相连通;垃圾箱1包括有:如附图1所示,翻转门101,翻转门101共设置有四组,四组翻转门101分别转动连接于四处垃圾桶临时放置口107开口端部位,翻转门101闭合状态下,翻转门101将垃圾桶临时放置口107完全遮掩闭合;如附图1所示,防夹挡板102,防夹挡板102呈矩形板结构,防夹挡板102共设置有四块,四块防夹挡板102分别设置于两处垃圾投放口a108及两处垃圾投放口b1013开口端底侧部位,且防夹挡板102通过复位弹簧与垃圾投放口a108及垃圾投放口b1013开口端部位相连接;如附图1所示,垃圾投放口翻盖103,垃圾投放口翻盖103呈矩形板结构,垃圾投放口翻盖103共设置有四块,四块垃圾投放口翻盖103分别设置于两处垃圾投放口a108及两处垃圾投放口b1013开口端顶侧部位,垃圾投放口翻盖103与垃圾投放口a108及垃圾投放口b1013转动相连接;如附图2所示,电动推杆1010,电动推杆1010共设置有四组,四组电动推杆1010固定安装于两处垃圾投放口a108及两处垃圾投放口b1013内端,且四组电动推杆1010分别与四块垃圾投放口翻盖103相连接。
45.其中,垃圾箱1包括有:控制箱1037,控制箱1037设置于垃圾箱1内部,且控制箱1037与电动推杆1010电性相连;如附图1所示,提示灯106,提示灯106共设置有四组,四组提示灯106分别内嵌安装于垃圾箱1前端面相对于两处垃圾投放口a108及两处垃圾投放口b1013开口端上侧方部位,且提示灯106与控制箱1037电性相连;如附图1所示,按钮104,按钮104共设置有四组,四组按钮104分别内嵌安装于垃圾箱1前端面相对于两处垃圾投放口a108及两处垃圾投放口b1013开口端下侧方部位,且按钮104与控制箱1037电性相连;如附图1所示,人体红外线感应探头105,人体红外线感应探头105共设置有四组,四组人体红外线感应探头105分别内嵌安装于垃圾箱1前端面相对于两处垃圾投放口a108及两处垃圾投
放口b1013开口端下侧方部位,且人体红外线感应探头105与控制箱1037电性相连;扬声器1038,扬声器1038设置于垃圾箱1内部,且扬声器1038与控制箱1037电性相连;垃圾箱1包括有:如附图2所示,垃圾压缩杆109,垃圾压缩杆109共设置有两组,两组垃圾压缩杆109分别设置于两处垃圾投放口a108内端顶面,且垃圾压缩杆109与控制箱1037电性相连;如附图2所示,两组垃圾压缩杆109底端均设置有垃圾压缩板,且两组垃圾压缩杆109位置与垃圾桶临时放置口107内垃圾桶位置相对;如附图2所示,桶满感应探头1012,桶满感应探头1012共设置有四组,四组桶满感应探头1012分别设置于四处垃圾桶临时放置口107内部顶侧部位,且桶满感应探头1012位置与垃圾桶临时放置口107内垃圾桶顶部开口端位置相对,桶满感应探头1012与控制箱1037电性相连。
46.实施例二,压缩杆的数量可根据其它垃圾桶的数量决定,如果一组四桶位的垃圾箱都是其它垃圾,那么压缩器的数量就是4个,如果一组六桶位的垃圾箱都是其它垃圾,那么压缩器的数量就是6个,可根据需求自行增加。
47.垃圾箱1包括有:如附图3所示,电动螺杆驱动组件a1011,电动螺杆驱动组件a1011共设置有两组,两组电动螺杆驱动组件a1011分别设置于位于左侧方的垃圾投放口a108和垃圾投放口b1013内部及位于右侧方的垃圾投放口a108和垃圾投放口b1013内部,电动螺杆驱动组件a1011与控制箱1037电性相连;如附图3所示,电动螺杆驱动组件b1015,电动螺杆驱动组件b1015共设置有两组,两组电动螺杆驱动组件b1015传动连接在两组电动螺杆驱动组件a1011上,电动螺杆驱动组件b1015与控制箱1037电性相连;如附图3所示,机械爪1016,机械爪1016共设置有两组,两组机械爪1016分别安装于两组电动螺杆驱动组件b1015上,且机械爪1016与控制箱1037电性相连;如附图3所示,机械爪限位开关1017,机械爪限位开关1017共设置有两组,两组机械爪限位开关1017分别设置于两组机械爪1016抓握端内端顶侧,机械爪限位开关1017与控制箱1037电性相连。
48.其中,垃圾箱1包括有:如附图3所示,方形延伸板1014,方形延伸板1014共设置有两块,两块方形延伸板1014分别固定设置于两处垃圾投放口b1013内端底部,方形延伸板1014将垃圾投放口b1013与垃圾桶临时放置口107分隔;如附图5所示,垃圾投放孔位1031,垃圾投放孔位1031呈圆形孔结构,垃圾投放孔位1031共设置有两处,两处垃圾投放孔位1031分别开设于两块方形延伸板1014顶端面中心部位连通垃圾投放口b1013与垃圾桶临时放置口107;如附图4所示,延伸筒1018,延伸筒1018呈圆筒结构,延伸筒1018共设置有两块,两块延伸筒1018分别固定安装于两处垃圾投放孔位1031内,延伸筒1018顶端面与方形延伸板1014顶端面处于同一水平面;如附图4所示,切割移动槽口1019,切割移动槽口1019呈优弧圆缺槽结构,切割移动槽口1019共设置有两处,两处切割移动槽口1019分别开设于两块延伸筒1018外周面上;垃圾箱1包括有:如附图5所示,凹型固定板1020,凹型固定板1020呈凹型结构,凹型固定板1020共设置有两块,两块凹型固定板1020分别固定安装于两块方形延伸板1014内凹端顶侧;如附图4所示,往复驱动电机1021,往复驱动电机1021共设置有两组,两组往复驱动电机1021分别固定安装于凹型固定板1020内凹端部位,往复驱动电机1021与控制箱1037电性相连;如附图5所示,主动齿轮1022,主动齿轮1022共设置有两块,两块主动齿轮1022位于两块凹型固定板1020正下方,两块主动齿轮1022与两组往复驱动电机1021转轴键连接;如附图5所示,转动辅助件1032,转动辅助件1032为轴承,转动辅助件1032共设置有两组,两组转动辅助件1032分别固定安装于两块延伸筒1018外周面底端;如附图5
所示,从动齿轮圈1023,从动齿轮圈1023共设置有两块,两块从动齿轮圈1023分别固定安装于两组转动辅助件1032上,从动齿轮圈1023与主动齿轮1022相啮合。
49.其中,垃圾箱1包括有:如附图5所示,延伸板1024,延伸板1024设置有两块,两块延伸板1024分别固定安装于两块从动齿轮圈1023上;如附图4所示,滑轨1025,滑轨1025共设置有两组,两组滑轨1025分别固定安装于两块延伸板1024顶端面;如附图4所示,滑块1026,滑块1026共设置有两组,两组滑块1026分别滑动安装于两组滑轨1025上;如附图4所示,承载板1028,承载板1028呈l型结构,承载板1028共设置有两块,两块承载板1028分别固定安装于两组滑块1026上;如附图4所示,电动缸1027,电动缸1027共设置有两组,两组电动缸1027分别固定安装于延伸板1024上,且电动缸1027活塞端与承载板1028固定相连接,电动缸1027与控制箱1037电性相连;垃圾箱1包括有:如附图4所示,切割驱动电机1029,切割驱动电机1029共设置有两组,两组切割驱动电机1029分别固定安装于两块承载板1028上,且切割驱动电机1029与控制箱1037电性相连;如附图5所示,切割刀片1030,切割刀片1030共设置有两块,两块切割刀片1030分别位于两块承载板1028下侧方部位,且切割驱动电机1029的转轴端与切割刀片1030轴心部位固定相连接;如附图4所示,切割刀片1030位置与切割移动槽口1019位置相对应;电动缸1027活塞端收纳状态下,切割刀片1030位于切割移动槽口1019外侧,电动缸1027活塞端伸展状态下,切割刀片1030切割端位于延伸筒1018内腔部位。
50.其中,垃圾箱1包括有:如附图6所示,垃圾托盘1033,垃圾托盘1033共设置有两块,两块垃圾托盘1033呈对称状设置于延伸筒1018底部开口端部位;如附图6所示,转轴1034,转轴1034共设置有两根,两根转轴1034分别与两块垃圾托盘1033固定相连接;如附图6所示,两块垃圾托盘1033闭合状态下将延伸筒1018底部开口端部位闭合;闭合驱动电机1035,闭合驱动电机1035共设置有两组,两组闭合驱动电机1035固定安装于从左侧方排列的第二处垃圾桶临时放置口107及第四处垃圾桶临时放置口107内端顶部,闭合驱动电机1035与转轴1034固定相连接,闭合驱动电机1035与控制箱1037电性相连;电磁铁1036,电磁铁1036共设置有两组,两组电磁铁1036内嵌安装于两块垃圾托盘1033上,电磁铁1036与控制箱1037电性相连。
51.本实施例的具体使用方式与作用:
52.垃圾投放前,垃圾投放人员拎垃圾至垃圾箱1前时,人体红外线感应探头105感应到垃圾投放人员,并将信号反馈给控制箱1037,控制箱1037控制对应该人体红外线感应探头105部位的电动推杆1010控制垃圾投放口翻盖103打开,同时控制箱1037控制扬声器1038发出欢迎及安全语句;
53.垃圾投放时,垃圾投放人员将所拎的垃圾从打开状态下的垃圾投放口翻盖103从垃圾投放口b1013开口端部位放置入对应垃圾投放孔位1031的延伸筒1018内,经由处于闭合状态并通过电磁铁1036磁吸状态下的垃圾托盘1033上;
54.垃圾破袋前,垃圾投放后,垃圾人员离开垃圾箱1,当人体红外线感应探头105无感应后,信号反馈给控制箱1037,控制箱1037控制电动推杆1010控制垃圾投放口翻盖103闭合,垃圾投放口翻盖103闭合后,控制箱1037先控制电动螺杆驱动组件a1011启动带动电动螺杆驱动组件b1015向垃圾投放口b1013部位移动,然后控制电动螺杆驱动组件b1015带动机械爪1016移动至垃圾投放孔位1031部位,控制机械爪1016张开并下移,下移过程中,当机
械爪限位开关1017接触到垃圾时,机械爪限位开关1017反馈信号给予控制箱1037,控制箱1037控制电动螺杆驱动组件b1015带动机械爪1016上移2cm,以避免机械爪1016过多抓住垃圾,然后控制机械爪1016闭合夹住垃圾袋;
55.垃圾破袋时,控制切割驱动电机1029启动带动切割刀片1030高速转动,同时电动缸1027活塞端伸展从而驱动滑块1026沿滑轨1025滑动3
‑
5cm,这时切割刀片1030切割端将位于延伸筒1018内腔部位,同时往复驱动电机1021启动带动主动齿轮1022转动,从而同步啮合从动齿轮圈1023通过转动辅助件1032沿延伸筒1018转动,从而带动切割刀片1030沿切割移动槽口1019做270
‑
300
°
旋转,从而使得高速转动的切割刀片1030将垃圾袋破袋,破袋后,电动缸1027活塞端重新收纳,驱动滑块1026沿滑轨1025回复滑动,使得切割刀片1030位于延伸筒1018内腔外;
56.垃圾破袋后,控制电磁铁1036断电,在无电磁铁1036的磁吸作用下,两块垃圾托盘1033下落打开,垃圾袋内的垃圾在重力作用下从破袋口部位自动落入垃圾桶临时放置口107内的垃圾桶内,同时通过电动螺杆驱动组件a1011及电动螺杆驱动组件b1015的配合控制机械爪1016带动垃圾袋移动至左侧相邻的垃圾投放口a108部位,机械爪1016控制张开,垃圾袋将自动落入对应该垃圾投放口a108正下方垃圾桶临时放置口107内的垃圾桶内,进一步的,在整个垃圾破袋过程中,如果有人继续投放垃圾,垃圾投放口并不开放,直至整个垃圾破袋过程停止;
57.当桶满感应探头1012感应到垃圾桶临时放置口107内垃圾桶桶满后,桶满感应探头1012反馈信号给予控制箱1037,控制箱1037控制对应相对位置的垃圾投放口不再打开,同时对应位置的提示灯106亮起,此时控制垃圾压缩杆109伸展缓慢下降,通过垃圾压缩板对垃圾进行压缩,当压缩力达到30
‑
50kg时,垃圾压缩杆109自动回缩至初始位置;如当经压缩后的垃圾桶内的垃圾低于桶满感应探头1012时,垃圾投放口可开放,提示灯106熄灭,此时如果再有人投放垃圾,垃圾投放口将会自动打开,但如压缩后垃圾依然高于桶满感应探头1012,垃圾压缩杆109缩回后将不再重复压缩,垃圾投放口依然处于锁死状态,提示灯106依然常亮。
58.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。