1.本实用新型涉及一种自动化设备上的机构,尤其涉及一种旋转送料机构。
背景技术:
2.带螺纹零件作为一种极为重要的工业连接零部件,广泛用于各种生产和生活中。随着自动化水平的不断提高,现有对带螺纹零件进一步加工或装配的送料机构存在以下缺陷:1.由于带螺纹零件的个体结构和尺寸存在差异,现有的旋转送料机构不能直接适用于各种规格带螺纹零件的送料,存在通用性差的技术问题;2.现有旋转送料机构的送料动作不稳定,自动化水平较低,存在送料效率低的技术缺陷。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提供一种通用性强、送料动作稳定、自动化水平高、送料高效的旋转送料机构。
4.为了实现以上目的,本实用新型采用这样一种旋转送料机构,包括基板、连接在基板上旋转动力源、连接在旋转动力源上的夹持动力源、两个连接在夹持动力源上的夹持臂,所述旋转动力源驱动夹持动力源作往复的旋转动作,所述夹持动力源驱动两个夹持臂作开合动作。
5.本实用进一步设置为旋转动力源的转角动作位置分别为起始点和收尾点,所述夹持动力源在起始点时驱动两个夹持臂作由开到合的夹紧动作,并在起始点至收尾点的过程中保持夹紧动作,所述夹持动力源在收尾点时驱动两个夹持臂作由合到开的释放动作,并在收尾点回至起始点的过程中保持释放动作。
6.本实用进一步设置为夹持动力源通过转板连接在旋转动力源上,所述夹持动力源上设置有夹持臂轨道,所述夹持臂活动连接在夹持臂轨道内。
7.本实用进一步设置为基板上连接有定位动力源,所述定位动力源上设置有受定位动力源驱动的定位挡板,所述定位挡板位于夹持动力源的上方,所述定位挡板包括顶部定位挡板、侧边定位挡板及正面定位挡板,所述顶部定位挡板、侧边定位挡板、正面定位挡板相互拼接形成半包围的定位腔室,所述定位腔室位于两个夹持臂在起始点位置时的中间。
8.本实用进一步设置为基板上连接有阻挡动力源,所述阻挡动力源上设置有受阻挡动力源驱动的阻挡挡板,所述阻挡挡板位于定位挡板的侧边。
9.本实用进一步设置为旋转动力源采用的是电机或气缸。
10.本实用进一步设置为夹持动力源采用的是电机或气缸。
11.本实用进一步设置为定位动力源采用的是电机或气缸。
12.本实用进一步设置为阻挡动力源采用的是电机或气缸。
13.上述旋转送料机构对带螺纹零件进行送料动作的方式为:1.带螺纹零件从送料通道进入,首颗带螺纹零件在定位挡板的定位作用下进入两个夹持臂之间,阻挡动力源驱动阻挡挡板动作,阻挡后续带螺纹零件前进,夹持动力源驱动两个夹持臂作由开到合的夹紧
动作使首颗带螺纹零件保持固定;2.旋转动力源动作驱动夹持动力源作正向旋转动作,将带螺纹零件旋转至加工工位,当带螺纹零件到位后夹持动力源驱动两个夹持臂作由合到开的释放动作使带螺纹零件从两个夹持臂上释放;3.旋转动力源动作驱动夹持动力源作反向旋转动作,并保持两个夹持臂的释放动作,将夹持动力源旋转至初始位置,如此往复,实现对带螺纹零件的高效送料。本实用新型旋转送料机构采用夹持臂实现对带螺纹零件的送料固定,可以适用于多数规格不同的带螺纹零件,具有通用性高的优点,而且送料动作稳定可靠、自动化水平高,送料行程短,提高送料的效率,定位挡板用于带螺纹零件进料的定位,保证后续带螺纹零件能稳定地在定位腔室内等待夹持动作,避免带螺纹零件进入时不呈立直状态以及脱落,阻挡挡板用于阻挡后续带螺纹零件直接进入。
附图说明
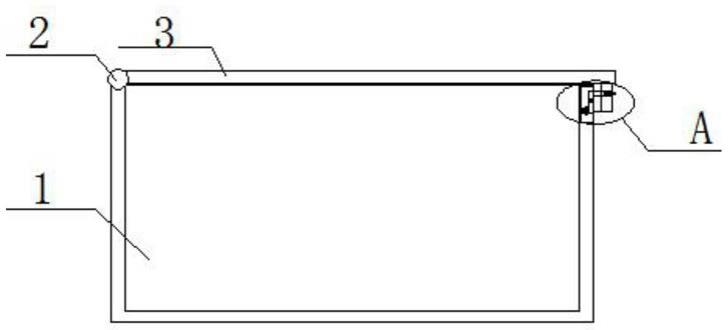
14.图1是本实用新型实施例旋转动力源处于起始点时立体图。
15.图2是本实用新型实施例旋转动力源处于收尾点时立体图。
16.图3是本实用新型实施例夹持动力源、夹持臂、夹持臂轨道立体图。
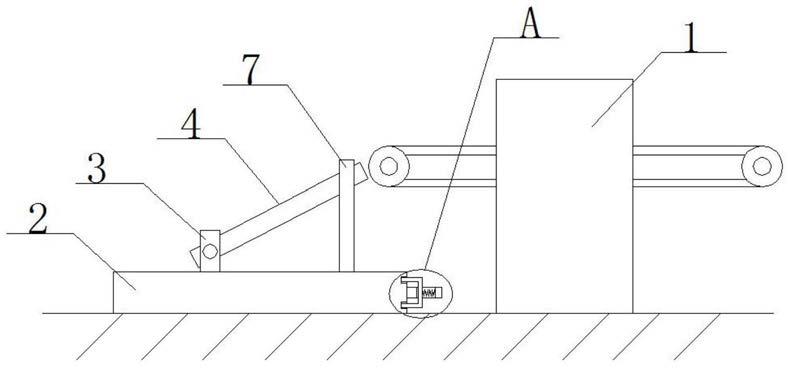
17.图4是本实用新型实施例局部立体图。
具体实施方式
18.下面结合附图对本发明做进一步详细说明。
19.如图1
‑
4所示,本实用新型是一种旋转送料机构,包括基板1、连接在基板1上旋转动力源2、连接在旋转动力源2上的夹持动力源3、两个连接在夹持动力源3上的夹持臂4,所述夹持动力源3通过转板5连接在旋转动力源2上,所述夹持动力源3上设置有夹持臂轨道6,所述夹持臂4活动连接在夹持臂轨道6内,所述旋转动力源2驱动夹持动力源3作往复的旋转动作,所述夹持动力源3驱动两个夹持臂4作开合动作,所述基板1上连接有定位动力源7,所述定位动力源7上设置有受定位动力源7驱动的定位挡板8,所述定位挡板8位于夹持动力源3的上方,所述定位挡板8包括顶部定位挡板81、侧边定位挡板82及正面定位挡板83,所述顶部定位挡板81、侧边定位挡板82、正面定位挡板83相互拼接形成半包围的定位腔室84,所述定位腔室84位于两个夹持臂4在起始点位置时的中间,所述基板1上连接有阻挡动力源9,所述阻挡动力源9上设置有受阻挡动力源9驱动的阻挡挡板10,所述阻挡挡板10位于定位挡板8的侧边,所述旋转动力源2的转角动作位置分别为起始点和收尾点,所述夹持动力源3在起始点时驱动两个夹持臂4作由开到合的夹紧动作,并在起始点至收尾点的过程中保持夹紧动作,所述夹持动力源3在收尾点时驱动两个夹持臂4作由合到开的释放动作,并在收尾点回至起始点的过程中保持释放动作,所述旋转动力源、夹持动力源、定位动力源、阻挡动力源均采用的是电机或气缸。
20.根据以上实施例,本实用新型旋转送料机构对带螺纹零件进行送料动作的方式为:1.如图1所示,带螺纹零件从送料通道进入,首颗带螺纹零件在定位挡板的定位作用下进入两个夹持臂之间(即定位腔室),阻挡动力源驱动阻挡挡板动作,阻挡后续带螺纹零件前进,夹持动力源驱动两个夹持臂作由开到合的夹紧动作使首颗带螺纹零件保持固定;2.如图2所示,旋转动力源动作驱动夹持动力源作正向旋转动作,将带螺纹零件旋转至加工工位,当带螺纹零件到位后夹持动力源驱动两个夹持臂作由合到开的释放动作使带螺纹零件
从两个夹持臂上释放;3.旋转动力源动作驱动夹持动力源作反向旋转动作,并保持两个夹持臂的释放动作,将夹持动力源旋转至初始位置,如此往复,实现对带螺纹零件的高效送料。
21.当然除了上述实施例外,本实用新型还可有其它多种实施例,在不背离本实用新型实质技术方案内容的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,且这些改变或变形和本专利中的技术方案是等同的,则这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
技术特征:
1.一种旋转送料机构,其特征在于:包括基板、连接在基板上旋转动力源、连接在旋转动力源上的夹持动力源、两个连接在夹持动力源上的夹持臂,所述旋转动力源驱动夹持动力源作往复的旋转动作,所述夹持动力源驱动两个夹持臂作开合动作。2.根据权利要求1所述的旋转送料机构,其特征在于:所述旋转动力源的转角动作位置分别为起始点和收尾点,所述夹持动力源在起始点时驱动两个夹持臂作由开到合的夹紧动作,并在起始点至收尾点的过程中保持夹紧动作,所述夹持动力源在收尾点时驱动两个夹持臂作由合到开的释放动作,并在收尾点回至起始点的过程中保持释放动作。3.根据权利要求1或2所述的旋转送料机构,其特征在于:所述夹持动力源通过转板连接在旋转动力源上,所述夹持动力源上设置有夹持臂轨道,所述夹持臂活动连接在夹持臂轨道内。4.根据权利要求2所述的旋转送料机构,其特征在于:所述基板上连接有定位动力源,所述定位动力源上设置有受定位动力源驱动的定位挡板,所述定位挡板位于夹持动力源的上方,所述定位挡板包括顶部定位挡板、侧边定位挡板及正面定位挡板,所述顶部定位挡板、侧边定位挡板、正面定位挡板相互拼接形成半包围的定位腔室,所述定位腔室位于两个夹持臂在起始点位置时的中间。5.根据权利要求4所述的旋转送料机构,其特征在于:所述基板上连接有阻挡动力源,所述阻挡动力源上设置有受阻挡动力源驱动的阻挡挡板,所述阻挡挡板位于定位挡板的侧边。6.根据权利要求1或2所述的旋转送料机构,其特征在于:所述旋转动力源采用的是电机或气缸。7.根据权利要求1或2所述的旋转送料机构,其特征在于:所述夹持动力源采用的是电机或气缸。8.根据权利要求4所述的旋转送料机构,其特征在于:所述定位动力源采用的是电机或气缸。9.根据权利要求5所述的旋转送料机构,其特征在于:所述阻挡动力源采用的是电机或气缸。
技术总结
本实用新型涉及一种旋转送料机构,包括基板、连接在基板上旋转动力源、连接在旋转动力源上的夹持动力源、两个连接在夹持动力源上的夹持臂,所述旋转动力源驱动夹持动力源作往复的旋转动作,所述夹持动力源驱动两个夹持臂作开合动作。本实用新型旋转送料机构采用夹持臂实现对带螺纹零件的送料固定,可以适用于多数规格不同的带螺纹零件,具有通用性高的优点,而且送料动作稳定可靠、自动化水平高,送料行程短,提高送料的效率。提高送料的效率。提高送料的效率。
技术研发人员:陈根
受保护的技术使用者:乐清市上合自动化科技有限公司
技术研发日:2021.04.28
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。