1.本公开涉及智能家居技术领域,尤其涉及一种智能垃圾桶。
背景技术:
2.垃圾桶是一种专门盛放垃圾或废弃物的容器。垃圾桶通常包括桶体,使用时通常在桶体内套设垃圾袋,当垃圾或废弃物较多需要扔掉时,便可扎起垃圾袋的袋口丢掉即可。
3.然而,人们每次仍垃圾的时候,需要手动将垃圾袋的袋口扎起打包,手与垃圾袋的袋口存在着一定程度上的直接接触,不可避免的会接触到附着在垃圾袋袋口处的垃圾污垢,不卫生,使用不方便,用户使用体验差。
技术实现要素:
4.为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种智能垃圾桶。
5.本公开提供了一种智能垃圾桶,包括桶体和铰接在所述桶体顶部的盖体,所述桶体和所述盖体共同围合形成容置腔,垃圾袋可套设在所述桶体的内壁上;
6.所述盖体和所述桶体上分别设置有驱动结构和控制器,所述盖体的朝向所述容置腔的一侧设置有第一挤压件、第二挤压件以及加热台,所述驱动结构、所述第一挤压件、所述第二挤压件和所述加热台分别与所述控制器电性连接;所述第一挤压件沿第一方向延伸且能够与所述垃圾袋的开口侧接触,所述第二挤压件沿第二方向延伸且能够与所述垃圾袋的开口侧接触,所述第一方向与所述第二方向交错,所述加热台远离所述第一挤压件和所述第二挤压件设置;所述控制器用于控制所述驱动结构和所述加热台上的加热元件工作,所述驱动结构用于驱动所述第一挤压件和所述第二挤压件均沿朝向靠近所述加热台的方向移动,以使所述第一挤压件和所述第二挤压件将所述垃圾袋的开口侧挤压至所述加热台上,以使所述加热元件对所述垃圾袋的袋口进行加热,或者驱动所述第一挤压件和所述第二挤压件均沿朝向远离所述加热台的方向移动,以将打包好的所述垃圾袋取出。
7.进一步地,所述桶体和所述盖体通过齿轮结构铰接在一起,所述盖体的内侧设置有翻盖感应器,所述翻盖感应器与所述控制器电性连接,所述翻盖感应器用于在检测到有外物靠近时向所述控制器发送开盖信号,所述控制器用于在接收到所述开盖信号时控制所述齿轮结构工作,以将所述盖体打开。
8.进一步地,所述盖体内设置有灭菌灯,所述盖体上设置有盖体开闭感应器,所述灭菌灯、所述盖体开闭感应器分别与所述控制器电连接;所述灭菌灯用于对所述智能垃圾桶内的垃圾进行杀菌,所述盖体开闭感应器用于检测所述盖体的开闭状态,所述控制器用于在所述盖体开闭感应器检测到所述盖体打开时,控制所述灭菌灯关闭,以及在所述盖体开闭感应器检测到所述盖体关闭时,控制所述灭菌灯开启。
9.进一步地,所述盖体内设置有负离子发生器,所述负离子发生器与所述控制器电性连接;所述控制器用于控制所述负离子发生器释放高压负离子。
10.进一步地,所述桶体内设置有吸气风机,所述吸气风机与所述控制器电性连接,所述吸气风机用于向所述桶体内进行吸气,以使套设在所述桶体的内壁上的垃圾袋贴设在所述桶体的内壁上。
11.进一步地,所述桶体的底部设置有行走结构,所述行走结构与所述控制器电性连接,所述控制器还用于控制所述行走结构移动,以使所述智能垃圾桶在所述行走结构的带动下移动。
12.进一步地,所述行走结构包括直行轮组以及可调整方向的转向轮组,所述直行轮组和所述转向轮组相对设置。
13.进一步地,所述桶体的侧壁底部设置有障碍物检测器,所述障碍物检测器与所述控制器电性连接,所述障碍物检测器用于检测所述智能垃圾桶的行走路径上是否有障碍物,所述控制器还用于在所述障碍物检测器检测到有所述障碍物时,调整所述行走结构的行走方向。
14.进一步地,所述桶体的外侧设置有摄像头,所述摄像头与所述控制器电性连接,所述摄像头用于对所述智能垃圾桶的行走路径上的所述障碍物进行信号采集,并将采集到的信号发送至所述控制器。
15.进一步地,所述智能垃圾桶还包括语音识别模块,所述语音识别模块用于对语音进行识别;所述语音识别模块与所述控制器电性连接,所述控制器用于根据所述语音识别模块识别到的语音信号对所述智能垃圾桶进行功能控制。
16.本公开实施例提供的技术方案与现有技术相比具有如下优点:
17.在本公开提供的智能垃圾桶中,通过设置桶体并在桶体的顶部铰接有盖体,桶体和盖体共同围合形成容置腔,桶体的内壁上可套设垃圾袋以收容垃圾或废弃物。在盖体上设置有驱动结构和控制器,盖体的朝向容置腔的一侧设置有第一挤压件、第二挤压件以及加热台,驱动结构、第一挤压件、第二挤压件和加热台分别与控制器电性连接;具体使用时,驱动结构驱动第一挤压件在第一方向上沿朝向靠近加热台的方向移动,还驱动第二挤压件在第二方向上沿朝向靠近加热台的方向移动,以使第一挤压件和第二挤压件将垃圾袋的开口侧挤压至加热台上,进而使加热元件对垃圾袋的袋口进行加热,也就是说,通过加热元件的加热即可对垃圾袋的袋口进行自动封口打包;将垃圾袋的袋口封口打包好之后,驱动结构驱动第一挤压件和第二挤压件均沿朝向远离加热台的方向移动,以将打包好的垃圾袋取出。基于此,本公开提供的智能垃圾桶结构简单,使用方便、卫生,避免了手动打包时与垃圾袋袋口处的垃圾污垢接触的缺陷,用户使用体验好。
附图说明
18.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
19.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
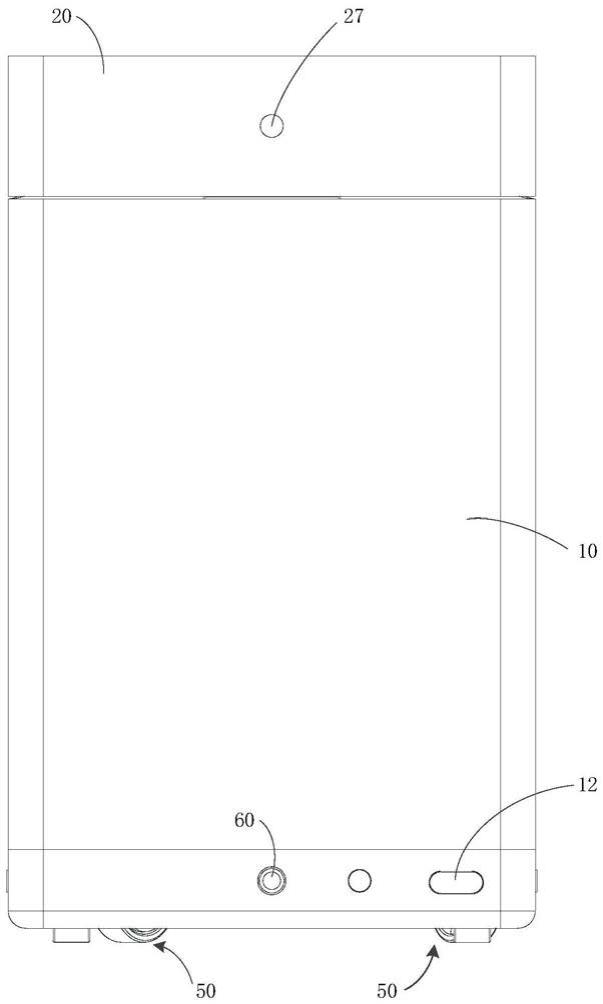
20.图1为本公开实施例所述智能垃圾桶的主视图;
21.图2为本公开实施例所述智能垃圾桶的后视图;
22.图3为本公开实施例所述智能垃圾桶盖体的第一视角装配示意图;
23.图4为本公开实施例所述智能垃圾桶盖体的第二视角装配示意图;
24.图5为本公开实施例所述智能垃圾桶桶体的装配示意图;
25.图6为本公开实施例所述智能垃圾桶的顶视图。
26.其中,10、桶体;11、吸气风机;12、障碍物检测器;20、盖体;21、第一挤压件;22、第二挤压件;23、加热台;24、翻盖感应器;25、灭菌灯;26、负离子发生器;27
‑
盖体开闭感应器;31、驱动结构;32、齿轮结构;40、控制器;50、行走结构;51、直行轮组;52、转向轮组;60、摄像头;70、语音识别模块;81、无线充电接触弹片;82、充电器电源母座;83
‑
电源模块。
具体实施方式
27.为了能够更清楚地理解本公开的上述目的、特征和优点,下面将对本公开的方案进行进一步描述。需要说明的是,在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合。
28.在下面的描述中阐述了很多具体细节以便于充分理解本公开,但本公开还可以采用其他不同于在此描述的方式来实施;显然,说明书中的实施例只是本公开的一部分实施例,而不是全部的实施例。
29.参考图1至图6中所示,本实施例提供一种智能垃圾桶(以下简称垃圾桶),包括桶体10和铰接在桶体10顶部的盖体20,桶体10和盖体20共同围合形成容置腔,垃圾袋可套设在桶体10的内壁上。
30.其中,桶体10和盖体20可以以任意合适的材质制成,例如塑料、不锈钢、陶瓷等。本领域技术人员容易理解的是,桶体10和盖体20的材质可以相同,当然,桶体10和盖体20的材质也可以不同,根据具体的使用环境任意选用,在此不作过多限制。
31.在本实施例中,盖体20和所述桶体10上分别设置有驱动结构31和控制器40,盖体20的朝向容置腔的一侧设置有第一挤压件21、第二挤压件22以及加热台23,驱动结构31、第一挤压件21、第二挤压件22和加热台23分别与控制器40电性连接;第一挤压件21沿第一方向延伸且能够与垃圾袋的开口侧接触,第二挤压件22沿第二方向延伸且能够与垃圾袋的开口侧接触,第一方向与第二方向交错,加热台23远离第一挤压件21和第二挤压件22设置;控制器40用于控制驱动结构31和加热台23上的加热元件工作,驱动结构31用于驱动第一挤压件21和第二挤压件22均沿朝向靠近加热台23的方向移动,以使第一挤压件21和第二挤压件22将垃圾袋的开口侧挤压至加热台23上,以使加热元件对垃圾袋的袋口进行加热,或者驱动第一挤压件21和第二挤压件22均沿朝向远离加热台23的方向移动,以将打包好的垃圾袋取出。具体实现时,驱动结构31也可以设置在盖体20上,驱动结构31能够实现驱动第一挤压件21和第二挤压件22均沿朝向靠近或者远离加热台23的方向移动即可,在此不做过多限制。
32.本领域普通技术人员容易理解的是,盖体20的朝向容置腔的一侧即盖体20的下侧,盖体20的远离容置腔的一侧即盖体20的上侧。第一挤压件21、第二挤压件22以及加热台23设置在盖体20的朝向容置腔的一侧,即盖体20的下侧。
33.作为一种可选的实现方式,第一挤压件21、第二挤压件22以及加热台23可以凸出于盖体20设置,当盖体20和桶体10配合时,第一挤压件21、第二挤压件22以及加热台23位于
桶体10内部。
34.作为另一种可选的实现方式,在盖体20的下侧设置收纳凹槽,第一挤压件21、第二挤压件22以及加热台23均位于收纳凹槽内,当盖体20和桶体10配合时,第一挤压件21、第二挤压件22以及加热台23均可以作用于垃圾袋以实现对应的功能。
35.作为另一种可选的实现方式,第一挤压件21、第二挤压件22、加热台23中的部分凸出于盖体20设置,第一挤压件21、第二挤压件22、加热台23中的另一部分设置在盖体20下侧的收纳凹槽内,当盖体20和桶体10配合时,第一挤压件21、第二挤压件22以及加热台23均可以作用于垃圾袋以实现对应的功能。
36.在本实施例中,控制器40包括遥控器,遥控器与驱动结构31、加热台23上的加热元件均电性连接,通过遥控器可以分别切换驱动结构31和加热元件的工作状态或休眠状态,以实现垃圾袋袋口的自动打包。
37.当然,控制器40也可以包括控制按钮和主控板,主控板为驱动结构31、加热台23上的加热元件供电,通过控制按钮的按压,主控板为驱动结构31和加热元件供电或断电,以使驱动结构31和加热元件在工作状态和休眠状态之间切换,进而实现垃圾袋袋口的自动打包。
38.在本实施例中,加热元件可以是电加热丝等任意合适的加热元件,能够实现对垃圾袋袋口的加热打包功能即可。
39.具体实现时,第一挤压件21和/或第二挤压件22可以是挤压杆、挤压板等任意合适的挤压件,能够作用于垃圾袋的开口侧并沿朝向靠近加热台23的方向移动,以将垃圾袋的开口侧挤压至加热台23上进行加热打包;待垃圾袋的袋口打包好之后,第一挤压件21和第二挤压件22能够与垃圾袋脱离且沿朝向远离加热台23的方向移动,以方便将打包好的垃圾袋取出即可。
40.其中,第一挤压件21沿第一方向延伸,第二挤压件22沿第二方向延伸,第一方向和第二方向是交错的两个方向,因此,第一挤压件21、第二挤压件22在移动的过程中不会碰撞,移动自如流畅。
41.优选的,第一挤压件21沿第一方向延伸布置,且能够与垃圾袋的开口侧接触并在第二方向上沿朝向靠近或者远离加热台23的方向移动,第二挤压件22沿第二方向延伸布置,且能够与垃圾袋的开口侧接触并在第一方向上沿朝向靠近或者远离加热台23的方向移动,从而能够将垃圾袋的开口侧在第一方向和第二方向上挤压变形并推送至加热台23上,通过电加热丝加热打包,自动打包,结构简单,使用方便,避免了在打包时手部与垃圾袋接触的缺陷,环保卫生,用户使用体验好。
42.通过上述技术方案,在本公开提供的智能垃圾桶中,通过设置桶体10并在桶体10的顶部铰接有盖体20,桶体10和盖体20共同围合形成容置腔,桶体10的内壁上可套设垃圾袋以收容垃圾或废弃物。在盖体20上设置有驱动结构31和控制器40,盖体20的朝向容置腔的一侧设置有第一挤压件21、第二挤压件22以及加热台23,驱动结构31、第一挤压件21、第二挤压件22和加热台23分别与控制器40电性连接;具体使用时,驱动结构31驱动第一挤压件21在第一方向上沿朝向靠近加热台23的方向移动,还驱动第二挤压件22在第二方向上沿朝向靠近加热台23的方向移动,以使第一挤压件21和第二挤压件22将垃圾袋的开口侧挤压至加热台23上,进而使加热元件对垃圾袋的袋口进行加热,也就是说,通过加热元件的加热
即可对垃圾袋的袋口进行自动封口打包;将垃圾袋的袋口封口打包好之后,驱动结构31驱动第一挤压件21和第二挤压件22均沿朝向远离加热台23的方向移动,以将打包好的垃圾袋取出。基于此,本公开提供的智能垃圾桶结构简单,使用方便、卫生,避免了手动打包时与垃圾袋袋口处的垃圾污垢接触的缺陷,用户使用体验好。
43.在本实施例中,参考图3和图4中所示,桶体10和盖体20通过齿轮结构32铰接在一起,结构简单,容易实现,盖体20开启和关闭自如方便。盖体20的内侧设置有翻盖感应器24,翻盖感应器24与控制器40电性连接,翻盖感应器24用于在检测到有外物靠近时向控制器40发送开盖信号,控制器40用于在接收到开盖信号时控制齿轮结构32工作,以将盖体20打开。
44.具体实现时,当有外物,例如人或者垃圾靠近盖体20时,翻盖感应器24在预设距离内会检测到有人或者垃圾,翻盖感应器24向控制器40发送开盖信号,控制器40接收到开盖信号后,控制器40控制齿轮结构32工作以将盖体20打开,即可进行垃圾投放。当垃圾投放完毕,人或者垃圾远离盖体20时,翻盖感应器24在预设距离内检测不到人或者垃圾,翻盖感应器24向控制器40发送关盖信号,控制器40接收到关盖信号后,控制器40控制齿轮结构32工作以将盖体20关闭,防止垃圾向外散发异味,有助于提高垃圾桶周围空气的清新度,安全环保。
45.进一步地,参考图3中所示,盖体20内设置有灭菌灯25,盖体20上设置有盖体开闭感应器27,灭菌灯25、盖体开闭感应器27分别与控制器40电连接;灭菌灯25用于对智能垃圾桶内的垃圾进行杀菌,盖体开闭感应器27用于检测盖体20的开闭状态,控制器40用于在盖体开闭感应器27检测到盖体20打开时,控制灭菌灯25关闭,以及在盖体开闭感应器27检测到盖体20关闭时,控制灭菌灯25开启。
46.具体实现时,当盖体开闭感应器27检测到盖体20处于关闭状态时,盖体开闭感应器27向控制器40发送开启灭菌灯25的信号,控制器40接收到开启灭菌灯25的信号后,控制器40控制灭菌灯25开启以对垃圾桶内的垃圾进行杀菌,防止细菌滋生,安全环保。当盖体开闭感应器27检测到盖体20处于开启状态时,盖体开闭感应器27向控制器40发送关闭灭菌灯25的信号,控制器40接收到关闭灭菌灯25的信号后,控制器40控制灭菌灯25关闭,避免能源浪费。
47.其中,灭菌灯25可以是紫外灭菌灯25、多功能电子灭菌灯25、卤素铁灯等。灭菌灯25可以是一个,也可以是多个。当灭菌灯25为多个时,部分灭菌灯25沿盖体20的周向间隔布置在盖体20内侧,部分灭菌灯25沿容置腔的高度方向间隔布置。
48.进一步地,参考图3中所示,盖体20内设置有负离子发生器26,负离子发生器26与控制器40电性连接;控制器40用于控制负离子发生器26释放高压负离子。
49.在本实施例中,负离子发生器26电路中产生的高压静电释放高压负离子,由于空气中大多数灰尘、颗粒物、臭气、异味、细菌以及烟雾等均带正电荷,因此,释放的高压负离子与空气中的灰尘、颗粒物等结合,直到无电荷后沉降,达到除臭的作用,结构简单,使用方便,安全环保,在一定程度上降低了打包好的垃圾袋上携带的细菌,人手动取出垃圾袋后,避免了细菌感染,同时垃圾桶无异味溢出,安全环保,使用体验好。
50.进一步地,参考图5中所示,在桶体10内设置有吸气风机11,吸气风机11与控制器40电性连接,吸气风机11用于向桶体10内进行吸气,以使套设在桶体10的内壁上的垃圾袋贴设在桶体10的内壁上。
51.具体使用时,在容置腔内重新布置新的垃圾袋以收容垃圾或废弃物,控制器40控制吸气风机11向桶体10内吸气,从而使套设在桶体10内壁上的新的垃圾袋的外壁贴设在桶体10的内壁上,方便垃圾投放,结构简单,使用方便。
52.其中,可以在每次取出打包好的垃圾袋后,同时手动将新的垃圾袋套设在桶体10内,然后通过控制器40控制吸气风机11向桶体10内吸气,以使新的垃圾袋的外壁贴设在桶体10的内壁上,方便垃圾投放。
53.另外,在桶体10内设置有垃圾袋存放区,每次手动取出打包好的垃圾袋后,垃圾袋存放区内的新垃圾袋可以自动向桶体10内移动至预设位置,然后通过控制器40控制吸气风机11向桶体10内吸气,以使新的垃圾袋的外壁贴设在桶体10的内壁上,方便垃圾投放。
54.在本实施例中,参考1、图2和图6中所示,在桶体10的底部设置有行走结构50,行走结构50与控制器40电性连接,控制器40还用于控制行走结构50移动,以使智能垃圾桶在行走结构50的带动下移动。
55.具体使用时,由于行走结构50设置在桶体10的底部且与桶体10保持相对固定,因此,当需要移动垃圾桶时,仅需通过控制器40控制行走结构50移动即可,行走结构50的移动可以带动垃圾桶移动,从而可以避免手动搬动垃圾桶或者带着垃圾行走到垃圾桶处才能投放垃圾的缺陷,结构简单,使用方便。
56.进一步地,参考图6中所示,行走结构50包括直行轮组51以及可调整方向的转向轮组52,直行轮组51和转向轮组52相对设置,具体使用时,直行轮组51和转向轮组52相互配合以实现垃圾桶的移动,例如前进、后退、转向等移动行为。
57.在本实施例中,参考图1和图2中所示,桶体10的侧壁底部设置有障碍物检测器12,障碍物检测器12与控制器40电性连接,障碍物检测器12用于检测智能垃圾桶的行走路径上是否有障碍物,控制器40还用于在障碍物检测器12检测到有障碍物时,调整行走结构50的行走方向。
58.具体使用时,当障碍物检测器12检测到垃圾桶的行走路径上有障碍物时,障碍物检测器12发送调整行走方向的信号给控制器40,控制器40接收到调整行走方向的信号后控制行走结构50调整垃圾桶的行走方向,从而可以避开障碍物继续行走,优化行走路线,使用方便。
59.进一步地,参考图1和图2中所示,桶体10的外侧设置有摄像头60,摄像头60与控制器40电性连接,摄像头60用于对智能垃圾桶的行走路径上的障碍物进行信号采集,并将采集到的信号发送至控制器40,摄像头60对垃圾桶的行走路径上的障碍物进行实时跟踪与记录,方便收集障碍物信息,优化垃圾桶的行走路线。
60.在本实施例中,参考图6中所示,智能垃圾桶还包括语音识别模块70,语音识别模块70用于对语音进行识别,语音识别模块70与控制器40电性连接,控制器40用于根据语音识别模块70识别到的语音信号对智能垃圾桶进行功能控制。
61.其中,语音识别模块70是将人的声音进行录制以形成功能指令,当人发出功能指令后,语音识别模块70接受该功能指令,并将接受到的功能指令发送给控制器40,由控制器40控制对应的功能部件执行对应的功能控制,如通过声控实现垃圾桶的开盖、自动打包、套袋、杀菌、除臭、移动等,结构简单,使用方便,用户体验好。
62.在本实施例中,本公开提供的垃圾桶还设置有电源模块83,电源模块83为控制器
40供电,垃圾桶上设置有无线充电接触弹片81和/或充电器电源母座82。该垃圾桶既可以通过无线充电接触弹片81与充电器底座进行接触式充电,也可以通过充电器电源母座82与充电器直插进行充电,性能可靠,耗电低,使用寿命长。
63.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
64.以上所述仅是本公开的具体实施方式,使本领域技术人员能够理解或实现本公开。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本公开的精神或范围的情况下,在其它实施例中实现。因此,本公开将不会被限制于本文所述的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。