1.本实用新型涉及刮泥机,尤其涉及一种行车式刮泥机。
背景技术:
2.自来水厂常规处理工艺包括混凝、沉淀、过滤、消毒等环节;沉淀池是沉淀环节的净水构筑物,刮泥机安装于沉淀池;矩形的沉淀池在上部两侧安装铁轨,刮泥机在铁轨上往复行走,随刮泥机安装的吸泥泵将池底污泥吸出池外。
3.沉淀池与刮泥机的理想状态是这样:池边的两根铁轨平行且在一个平面,吸泥机左侧、右侧各自的两个驱动钢轮分别在同一直线、且左右平行,并与沉淀池铁轨的两条平行线重合;刮泥机左右两侧速度相同。
4.实际上,由于设备安装的误差、刮泥机桁架的刚度不足、刮泥机两侧驱动电机的转速存在差异、沉淀池底积泥分布不均令刮泥阻力不一致
……
等等原因,致使刮泥机在行走刮泥时左右两侧出现了不该有的快慢现象(不同步)。这时,刮泥机跑偏,甚至脱轨,影响生产。自来水厂沉淀池刮泥机跑偏、脱轨是业内普遍存在的问题,也是难题。
技术实现要素:
5.为了解决现有技术中的问题,本实用新型提供了一种行车式刮泥机及其控制方法。
6.本实用新型提供了一种行车式刮泥机,包括刮泥机本体、左侧车轮、右侧车轮、控制器、前进接触器、后退接触器、左纠偏接触器、右纠偏接触器、左侧驱动电机、右侧驱动电机、左侧编码器和右侧编码器,所述左侧编码器安装在所述刮泥机本体的左侧,所述左侧编码器与沉淀池的左侧轨道紧密接触,所述右侧编码器安装在所述刮泥机本体的右侧,所述右侧编码器与沉淀池的右侧轨道紧密接触,所述左侧车轮安装在所述刮泥机本体的左侧,所述左侧车轮在沉淀池的左侧轨道上行走,所述右侧车轮安装在所述刮泥机本体的右侧,所述右侧车轮在沉淀池的右侧轨道上行走,所述左侧驱动电机与所述左侧车轮连接,所述右侧驱动电机与所述右侧车轮连接,所述左侧驱动电机与所述左纠偏接触器的一端连接,所述左纠偏接触器的另一端分别与所述前进接触器、后退接触器的一端连接,所述右侧驱动电机与所述右纠偏接触器的一端连接,所述右纠偏接触器的另一端分别与所述前进接触器、后退接触器的一端连接,所述前进接触器、后退接触器的另一端分别与所述控制器的输出端连接,所述左侧编码器的输出端和右侧编码器的输出端分别与所述控制器的输入端连接。
7.作为本实用新型的进一步改进,所述左侧编码器的输出端和右侧编码器的输出端通过通讯线路分别与所述控制器的输入端连接。
8.作为本实用新型的进一步改进,所述控制器为plc控制器。
9.作为本实用新型的进一步改进,所述左侧编码器和右侧编码器均采用绝对式光电旋转编码器。
10.作为本实用新型的进一步改进,所述左侧编码器和右侧编码器均位于所述刮泥机本体的中间位置。
11.作为本实用新型的进一步改进,所述刮泥机本体为刮泥机端梁。
12.作为本实用新型的进一步改进,所述刮泥机端梁的底部连接有刮泥板。
13.本实用新型的有益效果是:可通过左侧编码器和右侧编码器来实时测量行车式刮泥机的左右两侧的行走距离,实现行车式刮泥机的精确定位,再对行车式刮泥机行走时左右的不同步进行矫正、纠偏,以彻底解决行车式刮泥机跑偏脱轨的问题。
附图说明
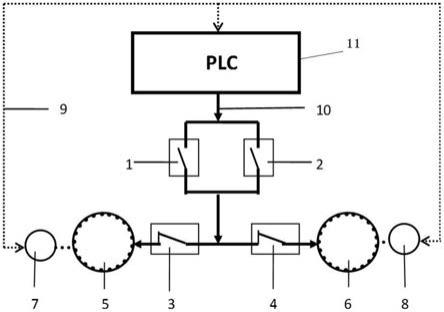
14.图1是本实用新型一种行车式刮泥机的控制示意图。
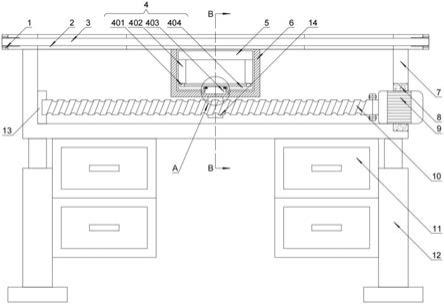
15.图2是本实用新型一种行车式刮泥机的侧面示意图。
具体实施方式
16.下面结合附图说明及具体实施方式对本实用新型作进一步说明。
17.如图1至图2所示,一种行车式刮泥机,包括刮泥机本体12、左侧车轮13、右侧车轮、控制器11、前进接触器1、后退接触器2、左纠偏接触器3、右纠偏接触器4、左侧驱动电机5、右侧驱动电机6、左侧编码器7和右侧编码器8,所述左侧编码器7安装在所述刮泥机本体12的左侧,所述左侧编码器7与平流沉淀池的左侧轨道14紧密接触,所述右侧编码器8安装在所述刮泥机本体12的右侧,所述右侧编码器8与沉淀池的右侧轨道紧密接触,所述左侧车轮13安装在所述刮泥机本体12的左侧,所述左侧车轮13在沉淀池的左侧轨道14上行走,所述右侧车轮安装在所述刮泥机本体12的右侧,所述右侧车轮在沉淀池的右侧轨道上行走,所述左侧驱动电机5与所述左侧车轮13连接,所述右侧驱动电机6与所述右侧车轮连接,所述左侧驱动电机5与所述左纠偏接触器3的一端连接,所述左纠偏接触器3的另一端分别与所述前进接触器1、后退接触器2的一端连接,所述右侧驱动电机6与所述右纠偏接触器4的一端连接,所述右纠偏接触器4的另一端分别与所述前进接触器1、后退接触器2的一端连接,所述前进接触器1、后退接触器2的另一端分别与所述控制器11的输出端连接,所述左侧编码器7的输出端和右侧编码器8的输出端通过通讯线路9分别与所述控制器11的输入端连接。
18.所述控制器11、前进接触器1、后退接触器2、左纠偏接触器3、右纠偏接触器4、左侧驱动电机5、右侧驱动电机6分别通过控制线路10连接。
19.所述控制器11为plc控制器。
20.所述左侧编码器7和右侧编码器8均采用绝对式光电旋转编码器。
21.所述左侧编码器7和右侧编码器8均位于所述刮泥机本体12的中间位置。
22.所述刮泥机本体12为刮泥机端梁。
23.所述刮泥机端梁的底部连接有刮泥板。
24.行车式刮泥机简称为刮泥机。
25.本实用新型提供的一种行车式刮泥机,其工作过程如下:
26.1、刮泥机精确位置的检测;
27.本实用新型选择数控机床和伺服控制系统常用的绝对式光电旋转编码器(以下简称:编码器)作为刮泥机位置的测量器件。编码器可以将角位移的脉冲转换为电信号,绝对
式光电旋转编码器掉电时测量的位置值不受影响、且每个位置都是唯一的。
28.在刮泥机的左右两侧分别安装一个编码器,编码器轴安装周长为25cm的橡胶检测轮,并与沉淀池两侧的铁轨紧密接触(参考图2),当刮泥机运动时、橡胶检测轮也跟随运动,带动编码器同步旋转产生电脉冲(本实用新型将编码器设置为:25脉冲/转),计算刮泥机左右两侧编码器的脉冲数(这时1脉冲=1cm)就能实现刮泥机左右两侧相对于沉淀池左右原点的精确定位(分辨率1cm)。
29.2、刮泥机的纠偏;
30.前文所述各种原因引起的刮泥机跑偏、都以刮泥机左右两侧相对于原点距离不相等来体现的(刮泥机某一侧超前、或一侧滞后),安装于刮泥机电控柜内的plc(可编程控制器)与编码器轮循通信,读取刮泥机左右两侧的精确位置,通过plc程序计算刮泥机左右两侧的偏差,然后由plc输出矫正信号,控制左或右纠偏接触器动作,纠偏完成(参考图1)。动作过程如下:
31.(1)、为了说明刮泥机的纠偏过程,假定:plc控制前进接触器1吸合,刮泥机左右两侧驱动电机得电旋转,拖动刮泥机前进,安装于吸泥机左右两侧的左侧编码器7和右侧编码器8也同步旋转,plc与两个编码器通讯,读取两个编码器的测量值(刮泥机左右位置)并进行计算:
32.当右侧编码器测量值-左侧编码器测量值≥3cm时,
33.即刮泥机右侧比左侧多走了3cm或以上,意味着刮泥机跑偏;根根偏差的结果,plc纠偏程序控制右纠偏接触器4吸合、接触器常闭触点分离,断开刮泥机右侧驱动电机6的电源,刮泥机右侧停止前进,右侧编码器8不动、测量值不变,这时刮泥机左侧仍在前进、左侧编码器7测量值增加,
34.当右侧编码器测量值-左侧编码器测量值≤1cm或=0cm时,
35.plc纠偏程序控制右纠偏接触器4释放,其常闭点重新闭合,刮泥机右侧驱动电机6重新得电,纠偏结束,吸泥机两侧继续同步前进。
36.(2)、刮泥机在沉淀池铁轨上往复行走刮泥,左右两侧出现的不同步状况有以下四种:前进时左侧快,前进时右侧快,后退时左侧快,后退时右侧快;本实用新型设定刮泥机左右快慢偏差的上限为3cm、以此进行纠偏,能很好地解决刮泥机跑偏的问题,从而杜绝了吸泥机脱轨。以上四种不同步的矫正与上文描述的过程类似。此外,本实用新型的plc程序还包括:编码器的通讯程序,编码器状态正常判断程序,编码器归零程序,刮泥机纠偏出错程序等等。
37.本实用新型提供的一种行车式刮泥机,具有以下优点:
38.(一). 目前,业内在平流沉淀池刮泥机定位常用的方法有:激光测距、gps、plc软件估算(时间乘以刮泥机速度)
……
但都远远地无法达到编码器的分辨率。编码器用于行车式吸泥机的精确定位,是水务行业传统机电设备向精密化伺服化作一尝试与探索;本实用新型将刮泥机精确定位应用于纠偏达到了很好的预期效果。
39.(二). 本实用新型中的平流沉淀池从0米到88.48米,分为进水区、沉淀池区、出水区,其中沉淀区积泥最多最厚(沉淀池前40米的淤泥约占积泥总量的75%),以往单一的全程刮泥模式会出现刮泥机在多泥区刮不净或少泥区浪费水的情况。刮泥机的精确定位有利于刮泥机工作模式的优化,例如将多泥区设定为点a至点b,plc程序根据这两个点的位置
值,可以很方便地实现ab区重复刮泥。这对保障水质有十分重要意义。
40.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。