一种用于gps勘测的rtk仪器支撑杆
技术领域
1.本技术涉及土地勘测设备的技术领域,尤其是涉及一种用于gps勘测的rtk仪器支撑杆。
背景技术:
2.在现代的土地勘测中,经常会用到rtk仪器,rtk是一种实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
3.现有的rtk仪器使用,先将一个rtk仪器安装支撑脚,使其组成移动基站,然后工人通过支撑杆连接另一个rtk仪器组成手持测绘器,支撑杆上固定连接有气泡水平仪,接着工人抓住支撑杆带动rtk仪器进行移动,到达指定地点后,工人将支撑杆保持竖直状态,进行数据测量。
4.但是,现有的支撑杆上固定连接的气泡水平仪的高度不易调节,针对不同高度的工人观察气泡水平仪,工人判断支撑杆是否保持竖直状态时容易受到视线上带来的误差,从而容易导致数据的测量发生误差,使得支撑杆的定位精度较低。
技术实现要素:
5.为了提高支撑杆的定位精度,本技术提供一种用于gps勘测的rtk仪器支撑杆。
6.本技术提供的一种用于gps勘测的rtk仪器支撑杆,采用如下的技术方案:一种用于gps勘测的rtk仪器支撑杆,包括支撑杆,所述支撑杆呈竖直设置,所述支撑杆的上端设有rtk仪器的机体,所述支撑杆的侧壁上开设有沿其轴向延伸的移动槽,所述移动槽内沿支撑杆的轴向滑移连接有滑动座,所述滑动座上铰接有转动嵌设在移动槽内的安装板,所述安装板上设有气泡水平仪,所述安装板上设有用于抵触滑动座的抵触面,当抵触面抵触于滑动座时,安装板脱离于移动槽并呈水平状态,此时气泡水平仪所处的面为安装板的上表面。
7.通过采用上述技术方案,当工人需要使用气泡水平仪时,工人推动滑动座,使得滑动座在移动槽内滑动,工人将滑动座移动至所需位置后,工人转动安装板,安装板与移动槽分离,使得安装板的抵触面抵触于滑动座,此时安装板呈水平状态,气泡水平仪位于安装板的上表面,从而方便不同高度的工人更好的观察气泡水平仪,方便了工人精确保持支撑杆的竖直状态,从而提高了对支撑杆的定位精度。
8.当工人不需要使用气泡水平仪时,工人转动安装板,使得抵触面与滑动座分离,直至安装板位于移动槽内,此时气泡水平仪位于移动槽内,从而方便了工人对气泡水平仪进行收纳和携带。
9.可选的,所述滑动座上设有卡接板,所述卡接板位于移动槽内,所述安装板上设有弹性卡球,所述卡接板上开设有供弹性卡球转动卡接的卡接槽。
10.通过采用上述技术方案,当工人不需要使用气泡水平仪时,工人转动安装板,使得安装板朝卡接板处转动,此时弹性卡球抵触于卡接板发生形变,直至弹性卡球与卡接槽相对应时,弹性卡球回复至自然状态并卡接在卡接槽内,从而提高了安装板收纳时的稳定性。
11.可选的,所述安装板远离滑动座的一端设有供工人拉动安装板使其旋转的施力把手。
12.通过采用上述技术方案,当工人需要转动安装板时,工人抓住施力把手带动安装板旋转,方便了工人对安装板施力进行转动。
13.可选的,所述滑动座上螺纹连接有用于抵紧移动槽槽壁的定位螺栓。
14.通过采用上述技术方案,当工人确定滑动座的高度位置时,工人拧动定位螺栓,使得定位螺栓抵紧于移动槽的槽壁,方便了工人锁定滑动座的位置。
15.可选的,所述支撑杆的侧壁上设有供工人手持的握手环。
16.通过采用上述技术方案,当工人需要手持支撑杆时,工人抓住握手环从而实现对支撑杆的抓持,提高了工人手掌与支撑杆之间的摩擦力,方便工人抓紧支撑杆。
17.可选的,所述支撑杆的侧壁上开设有沿其轴向延伸的滑动槽,所述握手环的内壁上设有滑动嵌设在滑动槽内的滑动块,所述滑动槽的槽壁上开设有若干个供滑动块转动卡接的定位槽,所有所述定位槽沿竖直方向依次排布。
18.通过采用上述技术方案,当工人需要抓持支撑杆的位置发生变化时,工人推动握手环沿支撑杆的轴向移动,握手环带动滑动块在滑动槽内滑动,直至握手环的位置确定后,工人转动握手环使其绕支撑杆的轴线旋转,握手环带动滑动块转动嵌设在定位槽内,从而完成对握手环的位置锁定,方便了工人使用握手环。
19.可选的,所述握手环的外壁上开设有连通握手环内部的穿设槽,所述穿设槽内滑动穿设有锁定杆,所有所述定位槽的槽壁上均开设有供锁定杆滑动插接的锁定孔。
20.通过采用上述技术方案,当滑动块转动卡接在定位槽内时,锁定杆与锁定孔相对应,工人推动锁定杆,使得锁定杆滑动插入到锁定孔内,滑动块不易与定位槽分离,从而提高了握手环的稳定性。
21.可选的,所述锁定杆上设有限位块,所述穿设槽的槽壁上开设有供限位块滑动嵌设的限位槽。
22.通过采用上述技术方案,当工人拉动锁定杆时,锁定杆与锁定孔分离,限位块在限位槽内滑动,当锁定杆与锁定杆完全分离时,限位块抵触于限位槽的槽壁,从而使锁定杆不易与握手环分离。
23.综上所述,本技术包括以下有益技术效果:
24.1.通过移动槽、滑动座、安装板、气泡水平仪、抵触面的设置,方便不同高度的工人更好的观察气泡水平仪,方便了工人精确保持支撑杆的竖直状态,从而提高了对支撑杆的定位精度;
25.2.通过卡接板、弹性卡球、卡接槽的设置,使得安装板收纳在移动槽内时,安装板不易发生旋转,提高了对安装板和气泡水平仪的收纳效果;
26.3.通过施力把手的设置,为工人提供了施力点,方便了工人使用安装板;
27.4.通过定位螺栓的设置,方便了工人锁定滑动座的高度位置;
28.5.通过握手环、滑动槽、滑动块、定位槽的设置,方便了工人抓紧支撑杆,提高了工人与支撑杆之间的摩擦力,同时方便了不同高度的工人使用握手环;
29.6.通过穿设槽、锁定杆、锁定孔的设置,提高了握手环的稳定性;
30.7.通过限位块、限位槽的设置,使得锁定杆不易与握手环分离。
附图说明
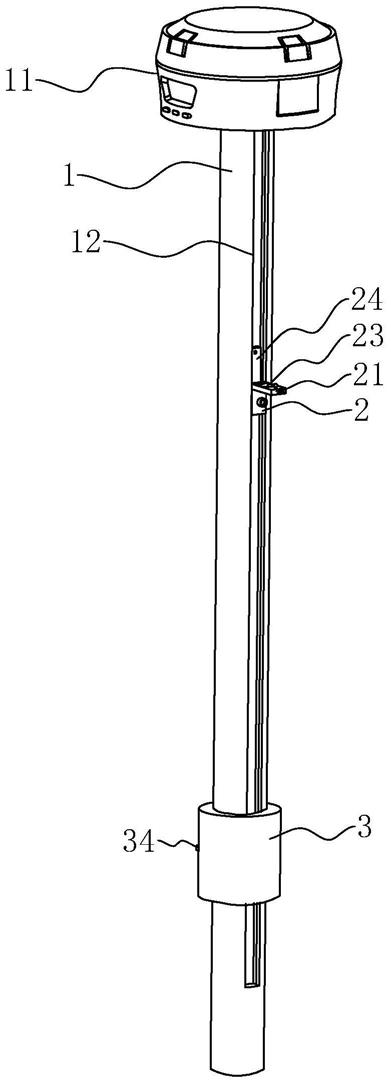
31.图1是本技术实施例中整体结构示意图;
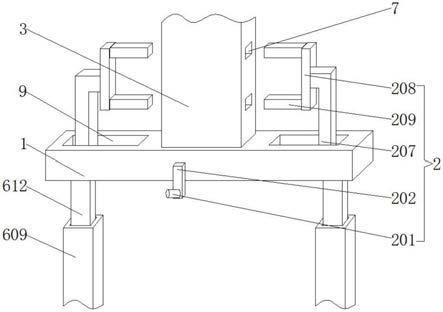
32.图2是本技术实施例中用于表示滑动座、安装板、气泡水平仪、卡接板的爆炸结构示意图;
33.图3是本技术实施例中用于表示握手环、滑动槽、定位槽的结构示意图;
34.图4是本技术实施例中用于表示锁定杆、穿设槽、锁定孔、限位块、限位槽的剖视结构示意图。
35.附图标记:1、支撑杆;11、机体;12、移动槽;2、滑动座;21、安装板;211、施力把手;212、转动轴;213、抵触面;22、放置槽;23、气泡水平仪;24、卡接板;25、卡接槽;26、弹性卡球;27、滚珠;28、定位螺栓;29、螺纹孔;3、握手环;31、滑动块;32、滑动槽;33、定位槽;34、锁定杆;35、穿设槽;36、锁定孔;37、限位块;38、限位槽。
具体实施方式
36.以下结合附图1
‑
4对本技术作进一步详细说明。
37.本技术实施例公开一种用于gps勘测的rtk仪器支撑杆。如图1所示,一种用于gps勘测的rtk仪器支撑杆,包括支撑杆1,支撑杆1呈竖直设置,支撑杆1的上端固定连接有rtk仪器的机体11,支撑杆1的侧壁上滑移连接有供工人手持的握手环3和供工人观察的气泡水平仪23。
38.如图1和图2所示,支撑杆1的侧壁上沿竖直方向开设有移动槽12,移动槽12的内滑动嵌设有滑动座2,滑动座2的横截面呈“t”字型,滑动座2的上端通过转动轴212铰接有安装板21,转动轴212的轴线呈水平设置,并且转动轴212的轴向与支撑杆1的轴向相互垂直,安装板21呈水平设置,安装板21的下端面为抵触于滑动座2上表面的抵触面213,安装板21的上表面开设有用于嵌设气泡水平仪23的放置槽22。
39.当工人需要观察气泡水平仪23时,工人推动滑动座2在移动槽12内移动,使得滑动座2沿竖直方向移动,直至气泡水平仪23移动至工人可精确观察的高度后,工人再对气泡水平仪23进行观察,从而对支撑杆1的竖直状态进行调整,保证了rtk仪器的测量精度,提高了对支撑杆1的定位精度。
40.当工人不需要观察气泡水平仪23时,工人推动安装板21,使得安装板21绕转动轴212的轴线朝支撑杆1处旋转,直至安装板21转动至移动槽12内,此时气泡水平仪23位于移动槽12内,从而方便了工人对气泡水平仪23进行收纳,进而方便了工人携带支撑杆1时对气泡水平仪23进行携带。
41.如图2所示,滑动座2的侧壁上滚动嵌设有用于抵触移动槽12槽壁的滚珠27,当滑动座2在移动槽12内滑动时,滚珠27抵触于移动槽12的槽壁发生滚动,从而方便了工人推动滑动座2在移动槽12内移动。
42.如图2所示,滑动座2的上端固定连接有呈竖直设置的卡接板24,卡接板24位于安装板21朝向移动槽12的一侧,卡接板24朝向安装板21的一侧开设有卡接槽25,安装板21的上表面通过短杆固定连接有用于卡接在卡接槽25内的弹性卡球26。
43.当工人需要收纳气泡水平仪23时,工人推动安装板21,使得安装板21绕转动轴212的轴线朝卡接板24处转动,此时安装板21带动弹性卡球26朝卡接槽25处转动,弹性卡球26
抵触于卡接板24发生形变,直至弹性卡球26与卡接槽25相对应时,弹性卡球26回复至自然状态并卡接在卡接槽25内,从而使安装板21保持竖直状态并位于移动槽12内,提高了安装板21的稳定性,便于工人对气泡水平仪23进行收纳。
44.如图2所示,安装板21远离支撑杆1的一端固定连接有供工人抓持的施力把手211,当工人需要使用气泡水平仪23时,工人将手伸入移动槽12并用力搬动施力把手211,使得安装板21绕转动轴212的轴线旋转,此时弹性卡球26与卡接槽25相互抵触发生形变,从而使弹性卡球26与卡接槽25分离,直至安装板21的抵触面213抵触于滑动座2的上表面,从而方便了工人转动安装板21。
45.如图2所示,滑动座2的侧壁上开设有连通于移动槽12槽壁的螺纹孔29,螺纹孔29的轴向与支撑杆1的径向相同,螺纹孔29内螺纹连接有定位螺栓28,当工人需要移动滑动座2时,工人拧动定位螺栓28,使得定位螺栓28与移动槽12的槽壁分离,然后工人推动滑动座2,直至滑动座2的位置确定后,工人拧紧定位螺栓28,使得定位螺栓28抵紧于移动槽12的槽壁,从而完成了滑动座2的位置锁定,方便了工人锁定滑动座2的高度位置。
46.如图3和图4所示,支撑杆1上滑动套设有供工人手持的握手环3,方便工人对支撑杆1进行抓持,进而方便工人抓紧支撑杆1。握手环3的内壁上固定连接有滑动块31,支撑杆1的侧壁上开设有沿竖直方向延伸的滑动槽32,滑动槽32的槽壁上开设有若干个沿竖直方向依次排布的定位槽33,定位槽33的开设路径位于同一水平面上,当工人滑动握手环3时,握手环3带动滑动块31在滑动槽32内滑动,直至握手环3的位置确定后,工人转动握手环3,使得握手环3绕支撑杆1的轴线与支撑杆1发生相对转动,握手环3带动滑动块31转动卡接在定位槽33内,从而完成对握手环3的位置定位,高边了不同身高的工人使用握手环3。
47.如图4所示,握手环3的外壁上开设有贯穿于滑动块31侧壁的穿设槽35,穿设槽35内滑动插接有沿握手环3径向延伸的锁定杆34,所有定位槽33的槽壁上均开设有供锁定杆34滑动插接的锁定孔36。当工人将滑动块31转动卡接在定位槽33内时,滑动块31抵触于定位槽33的槽壁,使得锁定孔36与穿设槽35相对应,工人推动锁定杆34使其插入到锁定孔36内,从而使握手环3不易与支撑杆1发生相对旋转,使得滑动块31不易与定位槽33,提高了握手环3的稳定性。
48.如图4所示,锁定杆34的侧壁上固定连接有限位块37,穿设槽35的槽壁上开设有供限位块37滑动嵌设的限位槽38,当限位块37抵触于限位槽38远离锁定孔36的一端槽壁时,锁定杆34与锁定孔36分离,当限位块37抵触于限位槽38朝向锁定孔36的一端槽壁时,锁定杆34与锁定孔36插接配合,从而方便了工人使用锁定杆34,是的锁定杆34不易与握手环3分离。
49.本技术实施例一种用于gps勘测的rtk仪器支撑杆的实施原理为:当工人需要调整支撑杆1的竖直状态时,工人拧松定位螺栓28,使得定位螺栓28与移动槽12的槽壁分离,工人再推动滑动座2在移动槽12内移动,使得滑动座2沿竖直方向移动,直至滑动座2移动至工人可精确观察的高度后,工人拧紧定位螺栓28,使得定位螺栓28抵紧于移动槽12的槽壁,工人用力搬动施力把手211,使得安装板21绕转动轴212的轴线旋转,此时弹性卡球26与卡接槽25的槽壁相互抵触发生形变,使弹性卡球26与卡接槽25分离,直至安装板21的抵触面213抵触于滑动座2的上表面,气泡水平仪23位于工人可精确观察的高度,从而方便了工人对支撑杆1的竖直状态进行调整,保证了rtk仪器的测量精度,提高了对支撑杆1的定位精度。
50.当工人需要收纳气泡水准仪时,工人推动安装板21,使得安装板21绕转动轴212的轴线转动,弹性卡球26抵触于卡接板24发生形变,直至弹性卡球26与卡接槽25相对应时,弹性卡球26回复至自然状态并卡接在卡接槽25内,从而使安装板21保持竖直状态并位于移动槽12内,气泡水平仪23被收纳在移动槽12内。
51.当工人需要使用握手环3时,工人拉动锁定杆34使其与锁定孔36分离,然后工人转动握手环3带动滑动块31与定位槽33分离,工人再推动握手环3带动滑动块31在移动槽12内移动,直至握手环3移动至工人所需手持的位置后,工人转动握手环3,使得滑动块31卡接在定位槽33内,然后工人推动锁定杆34使得锁定杆34插入锁定孔36内,从而将握手环3位置锁定,方便了工人使用握手环3。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。