1.本发明涉及动作识别领域,特别是涉及一种基于运动周期的儿童运动发展水平评价方法和系统。
背景技术:
2.对于现在的体育特长生的挖掘途径单纯的从比赛的成绩进行挖掘,而在长期对体育生身体数据和身体的研究方面,在其幼儿时期,通过对儿童运动情况的分析和总结,发现一些儿童在运动方面存在了天赋,通过对相关数据的分析发现,其中一项重要的参数,就是儿童在运动中的振幅,即加速度时身体反映出的频率,当对该数据在一定时间的收集形成了一个平均时间的数据,该数据中当数据高于研究的参考平均数时,该儿童的运动天赋高于其他的同年龄的儿童。
3.专利申请号为cn201911066012.3的专利公开了一种识别儿童运动情况系统以及检测方法,该方法通过使用四个振幅检测仪用于佩戴在儿童的四肢,并且主控装置能够将四个振幅检测仪对四肢采集的数据进行收集,使检测者能够更加直观快速的了解到儿童运动的数据,从而能够快速的运动优秀的儿童进行筛选,而且该设备能够对长跑和短跑的数据进行收集。但是上述系统只能获得儿童的运动数据,无法对运动数据进行分类,更不能实现针对儿童运动发展水平做出客观评价的要求。
技术实现要素:
4.本发明针对现有技术的不足,提供一种基于运动周期的儿童运动识别发展水平评价方法,旨在为儿童运动发展水平提供一个客观的评价。
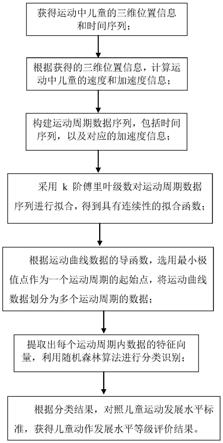
5.为了达到上述目的,本发明提供的技术方案是:一种基于运动周期的儿童运动识别发展水平评价方法,包括以下步骤,
6.步骤1,获得运动中儿童的三维位置信息和时间序列;
7.步骤2,根据步骤1获得的三维位置信息,计算运动中儿童的速度和加速度信息;
8.步骤3,构建运动周期数据序列,包括时间序列,以及对应的加速度信息;
9.步骤4,采用k阶傅里叶级数对运动周期数据序列进行拟合,得到具有连续性的拟合函数;
10.步骤5,根据运动曲线数据的导函数,选用最小极值点作为一个运动周期的起始点,将运动曲线数据划分为多个运动周期的数据;
11.步骤6,提取出每个运动周期内数据的特征向量,利用随机森林算法进行分类识别;
12.步骤7,根据分类结果,对照儿童运动发展水平标准,获得儿童动作发展水平等级评价结果。
13.进一步的,步骤1中通过定位系统获得运动中儿童的三维位置信息,所述定位系统包括定位标签、定位基站、服务器、客户端;
14.所述定位标签包括微控制单元(mcu)、发射天线和供电模块,定位标签通过uwb通信协议向定位基站发射信号;
15.所述定位基站包括接收天线,mcu,网络通信模块和供电模块,定位基站通过接收定位标签无线信号,所述定位基站的个数至少为4个;
16.定位处理器,与定位基站相连接,用于根据定位基站收到的信息,利用时间差对定位标签进行定位,获取定位标签的(x,y,z)三维位置信息和时间序列;
17.所述服务器通过wifi或有线网络与定位处理器相连接,用于存储定位标签信息;
18.所述客户端,通过访问服务器获取定位标签的三维位置信息和时间序列。
19.进一步的,步骤2中根据三维坐标信息,运用差分算法计算运动中儿童的速度和加速度信息,实现方式如下,
20.设δt为时间间隔,则运动中儿童的速度v
i
和加速度a
i
为,
[0021][0022][0023]
其中,x
i
,y
i
,z
i
为三维坐标。
[0024]
进一步的,步骤4的具体实现过程如下:
[0025]
一个运动行为需要利用多个定位标签同时采集数据,定位标签中通过无线传感器接收运动数据,每个传感器由多个测量单元构成,因此,每个传感器在每个时刻都产生一个向量,即给定一个样本,单个传感器在t
i
时刻(即第t
i
次采样时),产生一个如下的向量:
[0026]
a(t
i
)=(a1(t
i
),a2(t
i
),
…
a
m
(t
i
))
ꢀꢀ
(1)
[0027]
其中,m表示传感器测量单元总数,单个传感器进行连续采样,产生一个观测矩阵:
[0028]
s=[a(t1),a(t2),
…
a(t
n
)]
t
ꢀꢀ
(2)
[0029]
其中,a(t
i
),i=1,2,
…
n是单个传感器的第t
i
次采样数据,因此式(2)可以表示为:
[0030][0031]
对观测矩阵的每一列数据都采用傅里叶级数拟合,即将单个传感器每一个测量单元的数据序列都转化为关于采样时刻t’的拟合函数,假设一个运动是由n个传感器同时采集获得,因此拟合函数s为n
×
m的矩阵。
[0032]
进一步的,步骤6中提取出每个运动周期内数据的特征向量的具体实现过程如下:
[0033]
标定好周期起始点后,根据拟合函数提取出一个周期的数据,然后通过对拟合函数进行重采样,得到近似一个周期的运动数据,以此表达函数一个周期内的曲线特征,重采样的周期序列的长短通过定位标签中传感器的采样频率,普通儿童完成一个运动周期的时间与重采样的采样间隔决定。
[0034]
假定定位标签中传感器的采样频率为f,普通儿童完成一个运动周期的时间为t1,对样本函数s的每个元素函数进行离散化处理,即传感器每个测量单元的函数以确定的周期起始点t开始进行重采样,第k个测量单元的周期数据可表示为
[0035]
v
k
=(a
k
(t),a
k
(t d),
…
a
k
(t l
‑
1))
ꢀꢀ
(3)
[0036]
其中,k=1,2,
…
m,d为采样间隔,l表示采样间隔d=1时的周期长度,l由采样频率f和运动周期时间t1决定,即l=f
×
t1。
[0037]
对每个行为样本提取特征向量,首先根据式(3)对每个传感器都以式(4)的形式构造向量
[0038]
v
j
=(v1,v2,
…
v
m
),j=1,2,
…
n
ꢀꢀ
(4)
[0039]
其中,n表示传感器的总数,m表示每个传感器的测量单元总数,然后将所有传感器的v
j
排成如下的行向量:
[0040]
v=(v1,v1…
,v
n
)
ꢀꢀ
(5)
[0041]
式(5)就是将一个样本所有传感器所有测量单元的周期数据序列排成一个n
×
m
×
[l/d]维向量的形式,以此作为样本的特征向量,用于之后的分类识别。
[0042]
进一步的,利用随机森林算法进行分类识别的具体流程如下:
[0043]
初始化随机森林,设定随机森林中决策树的数量为k,每个决策树的特征属性个数为f,对于每个决策树k
j
,从训练集中随机抽取m个样本进行训练,训练次数为e,得到训练完成后的随机森林模型;然后将测试样本的特征向量输入到随机森林模型中,输出经模型分类后具体识别的活动类别。
[0044]
本发明还提供一种基于运动周期的儿童运动识别发展水平评价系统,包括以下模块:
[0045]
数据获取模块,用于获得运动中儿童的三维位置信息和时间序列;
[0046]
加速度计算模块,用于根据获得的三维位置信息,计算运动中儿童的速度和加速度信息;
[0047]
周期数据序列构建模块,用于构建运动周期数据序列,包括时间序列,以及对应的加速度信息;
[0048]
数据拟合模块,用于采用k阶傅里叶级数对运动周期数据序列进行拟合,得到具有连续性的拟合函数;
[0049]
运动周期划分模块,用于根据运动曲线数据的导函数,选用最小极值点作为一个运动周期的起始点,将运动曲线数据划分为多个运动周期的数据;
[0050]
分类识别模块,用于提取出每个运动周期内数据的特征向量,利用随机森林算法进行分类识别;
[0051]
评价模块,用于根据分类结果,对照儿童运动发展水平标准,获得儿童动作发展水平等级评价结果。
[0052]
进一步的,数据拟合模块的具体实现过程如下:
[0053]
一个运动行为需要利用多个定位标签同时采集数据,定位标签中通过无线传感器接收运动数据,每个传感器由多个测量单元构成,因此,每个传感器在每个时刻都产生一个向量,即给定一个样本,单个传感器在t
i
时刻,产生一个如下的向量:
[0054]
a(t
i
)=(a1(t
i
),a2(t
i
),
…
a
m
(t
i
))
ꢀꢀ
(1)
[0055]
其中,m表示传感器测量单元总数,单个传感器进行连续采样,产生一个观测矩阵:
[0056]
s=[a(t1),a(t2),
…
a(t
n
)]
t
ꢀꢀ
(2)
[0057]
其中,a(t
i
),i=1,2,
…
n是单个传感器的第t
i
次采样数据,因此式(2)可以表示为:
[0058][0059]
对观测矩阵的每一列数据都采用傅里叶级数拟合,即将单个传感器每一个测量单元的数据序列都转化为关于采样时刻t’的拟合函数,假设一个运动是由n个传感器同时采集获得,因此拟合函数s为n
×
m的矩阵。
[0060]
进一步的,分类识别模块中提取出每个运动周期内数据的特征向量的具体实现过程如下:
[0061]
标定好周期起始点后,根据拟合函数提取出一个周期的数据,然后通过对拟合函数进行重采样,得到近似一个周期的运动数据,以此表达函数一个周期内的曲线特征,重采样的周期序列的长短通过定位标签中传感器的采样频率,普通儿童完成一个运动周期的时间与重采样的采样间隔决定。
[0062]
假定定位标签中传感器的采样频率为f,普通儿童完成一个运动周期的时间为t1,对样本函数s的每个元素函数进行离散化处理,即传感器每个测量单元的函数以确定的周期起始点t开始进行重采样,第k个测量单元的周期数据可表示为
[0063]
v
k
=(a
k
(t),a
k
(t d),
…
a
k
(t l
‑
1))
ꢀꢀ
(3)
[0064]
其中,k=1,2,
…
m,d为采样间隔,l表示采样间隔d=1时的周期长度,l由采样频率f和运动周期时间t1决定,即l=f
×
t1。
[0065]
对每个行为样本提取特征向量,首先根据式(3)对每个传感器都以式(4)的形式构造向量
[0066]
v
j
=(v1,v2,
…
v
m
),j=1,2,
…
n
ꢀꢀ
(4)
[0067]
其中,n表示传感器的总数,m表示每个传感器的测量单元总数,然后将所有传感器的v
j
排成如下的行向量:
[0068]
v=(v1,v1…
,v
n
)
ꢀꢀ
(5)
[0069]
式(5)就是将一个样本所有传感器所有测量单元的周期数据序列排成一个n
×
m
×
[l/d]维向量的形式,以此作为样本的特征向量,用于之后的分类识别。
[0070]
进一步的,利用随机森林算法进行分类识别的具体流程如下:
[0071]
初始化随机森林,设定随机森林中决策树的数量为k,每个决策树的特征属性个数为f,对于每个决策树k
j
,从训练集中随机抽取m个样本进行训练,训练次数为e,得到训练完成后的随机森林模型;然后将测试样本的特征向量输入到随机森林模型中,输出经模型分类后具体识别的活动类别。
[0072]
与现有技术相比,本发明在信息采集方面系统结构较为简洁、方便,仅需携带定位标签,即可运用新uwb无线计算技术实时获取运动中儿童的三维位置信息,数据可以精确到厘米级;而不再需要携带三维加速度和心率等传感器,增加了便携性,降低了系统复杂度和能耗。
[0073]
采用k阶傅里叶级数对运动周期数据序列拟合,将非周期性的运动数据转化为周期性的函数曲线数据,并通过导函数确定每个运动周期的起始点,从而提取出每个运动周期内数据的特征向量,实现运动类别的识别,更好的为儿童运动发展水平提供一个客观的
评价。
附图说明
[0074]
图1为本发明实施例的流程。
具体实施方式
[0075]
下面结合附图和实施例对本发明的技术方案作进一步说明。
[0076]
如图1所示,本发明提供一种基于运动周期的儿童运动识别发展水平评价方法,包括以下步骤:
[0077]
步骤1,获得运动中儿童的三维位置信息和时间序列;
[0078]
具体的,步骤1中通过定位系统获得运动中儿童的三维位置信息,所述定位系统包括定位标签、定位基站、服务器、客户端;
[0079]
所述定位标签包括微控制单元(mcu)、发射天线和供电模块,定位标签通过uwb通信协议向定位基站发射信号;
[0080]
所述定位基站包括接收天线,mcu,网络通信模块和供电模块,定位基站通过接收定位标签无线信号,所述定位基站的个数至少为4个;
[0081]
定位处理器,与定位基站相连接,用于根据定位基站收到的信息,利用时间差对定位标签进行定位,获取定位标签的(x,y,z)三维位置信息和时间序列;
[0082]
所述服务器通过wifi或有线网络与定位处理器相连接,用于存储定位标签信息;
[0083]
所述客户端,通过访问服务器获取定位标签的三维位置信息和时间序列。
[0084]
步骤2,根据步骤1获得的三维位置信息,计算运动中儿童的速度和加速度信息;
[0085]
具体的,步骤2中根据三维坐标信息,运用差分算法计算运动中儿童的速度和加速度信息,实现方式如下,
[0086]
设δt为时间间隔,则运动中儿童的速度v
i
和加速度a
i
为,
[0087][0088][0089]
其中,x
i
,y
i
,z
i
为三维坐标。
[0090]
步骤3,构建运动周期数据序列,包括时间序列,以及对应的加速度信息;
[0091]
通过文献调查研究可知,现有技术中都是通过采集运动人员的加速度,以此作为运动类别分类的基础,因此本发明也需用的是加速度。
[0092]
根据加速度进行运动分类的相关研究有:陈雷,杨杰等利用佩戴在人体胯部的加速度传感器采集的加速度数据的几何特征对上楼、下楼、跑步、站立和步行等运动状态的识别,识别率在70%至95%之间;sa
‑
kwang song等人利用在手机中嵌入三维加速度传感器对日常生活中的常见动作状态进行识别以实现对日常活动的监测,研究中涉及的活动包括跑步、坐下、起立、跌倒等,使用多层感知器对活动进行识别,识别率达到了97.9%至99.30%;王昌喜等将两个加速度传感器固定在人体上肢上,通过采集两个三维加速度传感器的加速度数据,对数据进行预处理后,将小波变换用于运动模式识别的主要信息主要是加速度、图
像和肌电等。
[0093]
步骤4,采用k阶傅里叶级数对运动周期数据序列进行拟合,得到具有连续性的拟合函数;
[0094]
具体的,步骤4的具体实现过程如下:
[0095]
一个运动行为需要利用多个定位标签同时采集数据,定位标签中通过无线传感器接收运动数据,每个传感器由多个测量单元构成,因此,每个传感器在每个时刻都产生一个向量,即给定一个样本,单个传感器在t
i
时刻(即第t
i
次采样时),产生一个如下的向量:
[0096]
a(t
i
)=(a1(t
i
),a2(t
i
),
…
a
m
(t
i
))
ꢀꢀ
(1)
[0097]
其中,m表示传感器测量单元总数,单个传感器进行连续采样,产生一个观测矩阵:
[0098]
s=[a(t1),a(t2),
…
a(t
n
)]
t
ꢀꢀ
(2)
[0099]
其中,a(t
i
),i=1,2,
…
n是单个传感器的第t
i
次采样数据,因此式(2)可以表示为:
[0100][0101]
对观测矩阵的每一列数据都采用傅里叶级数拟合,即将单个传感器每一个测量单元的数据序列都转化为关于采样时刻t’的拟合函数,假设一个运动是由n个传感器同时采集获得,因此拟合函数s为n
×
m的矩阵。
[0102]
步骤4中采用k阶傅里叶级数进行拟合的具体过程如下:
[0103]
步骤4.1,输入运动周期数据序列,对其作离散傅里叶变换;
[0104]
步骤4.2,取离散傅里叶变换得幅度最大值处的频率值w1;
[0105]
步骤4.3,获取运动周期数据序列的频率w2和周期t1,其中w1大于w2,周期t1是普通儿童完成一项运动的时间;
[0106]
步骤4.4,取n=w1/w2,则k阶傅里叶级数拟合函数的频率为w=w1/n。
[0107]
步骤5,根据运动曲线数据的导函数,选用最小极值点作为一个运动周期的起始点,将运动曲线数据划分为多个运动周期的数据;
[0108]
一个函数存在多个极值点,本发明选用最小的极值点作为一个运动周期的起始点是为了统一标准,从而使得基函数相同的不同函数在同一起点处进行对齐。
[0109]
步骤6,提取出每个运动周期内数据的特征向量,利用随机森林算法进行分类识别;
[0110]
具体的,步骤6中提取出每个运动周期内数据的特征向量的具体实现过程如下:
[0111]
标定好周期起始点后,根据拟合函数提取出一个周期的数据,然后通过对拟合函数进行重采样,得到近似一个周期的运动数据,以此表达函数一个周期内的曲线特征,重采样的周期序列的长短通过定位标签中传感器的采样频率,普通儿童完成一个运动周期的时间与重采样的采样间隔决定。
[0112]
假定定位标签中传感器的采样频率为f,普通儿童完成一个运动周期的时间为t1,对样本函数s的每个元素函数进行离散化处理,即传感器每个测量单元的函数以确定的周期起始点t开始进行重采样,第k个测量单元的周期数据可表示为
[0113]
v
k
=(a
k
(t),a
k
(t d),
…
a
k
(t l
‑
1))
ꢀꢀ
(3)
[0114]
其中,k=1,2,
…
m,d为采样间隔,l表示采样间隔d=1时的周期长度,l由采样频率f和运动周期时间t1决定,即l=f
×
t1。
[0115]
对每个行为样本提取特征向量,首先根据式(3)对每个传感器都以式(4)的形式构造向量
[0116]
v
j
=(v1,v2,
…
v
m
),j=1,2,
…
n
ꢀꢀ
(4)
[0117]
其中,n表示传感器的总数,m表示每个传感器的测量单元总数,然后将所有传感器的v
j
排成如下的行向量:
[0118]
v=(v1,v1…
,v
n
)
ꢀꢀ
(5)
[0119]
式(5)就是将一个样本所有传感器所有测量单元的周期数据序列排成一个n
×
m
×
[l/d]维向量的形式,以此作为样本的特征向量,用于之后的分类识别。
[0120]
进一步的,利用随机森林算法进行分类识别的具体流程如下:
[0121]
初始化随机森林,设定随机森林中决策树的数量为k,每个决策树的特征属性个数为f,对于每个决策树k
j
,从训练集中随机抽取m个样本进行训练,训练次数为e,得到训练完成后的随机森林模型;然后将测试样本的特征向量输入到随机森林模型中,输出经模型分类后具体识别的活动类别。
[0122]
步骤7,根据分类结果,对照儿童运动发展水平标准(参照:1)0岁~6岁儿童发育行为评估量表[i],中华人民共和国卫生行业标准ws/t 580—2017;2)范雪,罗冬梅,陈皆播,石少锋.3~6岁幼儿跑步动作发展特征及教学策略分析[j].体育科学,2017,37(11):40
‑
47.),获得儿童动作发展水平等级评价结果。
[0123]
本发明实施例还提供一种基于运动周期的儿童运动识别发展水平评价系统,包括以下模块:
[0124]
数据获取模块,用于获得运动中儿童的三维位置信息和时间序列;
[0125]
加速度计算模块,用于根据获得的三维位置信息,计算运动中儿童的速度和加速度信息;
[0126]
周期数据序列构建模块,用于构建运动周期数据序列,包括时间序列,以及对应的加速度信息;
[0127]
数据拟合模块,用于采用k阶傅里叶级数对运动周期数据序列进行拟合,得到具有连续性的拟合函数;
[0128]
运动周期划分模块,用于根据运动曲线数据的导函数,选用最小极值点作为一个运动周期的起始点,将运动曲线数据划分为多个运动周期的数据;
[0129]
分类识别模块,用于提取出每个运动周期内数据的特征向量,利用随机森林算法进行分类识别;
[0130]
评价模块,用于根据分类结果,对照儿童运动发展水平标准,获得儿童动作发展水平等级评价结果。
[0131]
各模块的具体实现方式和各步骤相应,本发明不予撰述。
[0132]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。