用于产品的物流内运输的系统和方法
1.本发明涉及一种用于产品的物流内运输(intralogistic transport)的系统。例如,这种系统可以用于运输在机场中的行李物品或者用于运输包裹直到对其进行的处理/分选完毕。物流内运输是指在作业场所范围内运输产品的情况。本发明特别地但不排他地针对在覆盖之下(典型地在大厅中)进行运输的情况。
2.美国公开us 7912574 b2描述了一种用于运输产品的系统,其中以地板形式的移动区域被分成正方形单元。这些单元的中心可以被认为是网格点,考虑到单元的正方形形状,这些网格点以正方形图案布置。根据移动区域内单元的位置,每个单元具有最多四个相邻单元。一部分单元用于在其中临时存储保持构件。另一部分单元用于借助于自动驾驶车辆经由这些单元来移动保持构件。这些单元的尺寸被选择为略大于保持构件的尺寸,使得保持构件各自正好配合在一个单元内。这些车辆被设计成在保持构件下方行驶并且将它们提升。从上方看,由车辆承载的保持构件从所述车辆突出。每个车辆的控制被设计成使得每个车辆能够在一个单元内转动90度或其倍数,而不需要由所述车辆承载的保持构件随其一起转动。由于车辆排他地从一个单元移动到相邻单元,所以每个车辆在具有或不具有保持构件的情况下沿着在移动区域内彼此垂直定向的移动轨迹移动,其中,车辆和保持构件覆盖地板的彼此垂直定向的条带部分(strip portion)。由于每个保持构件仅正好配合在单元内的事实,在单元内保持构件的假定转动是不可能的,因为在转动时,保持构件将不可避免地从所述单元突出,这是不期望的。为了也能够转动保持构件,us 7912574 b2描述了使用较大的正方形单元,其侧面是在前面描述中使用的单元的长度的两倍并且因此其面积是在前面描述中使用的单元的面积的两倍。
3.本发明的目的是提供一种有效地使用移动区域的系统。为此,根据第一方面,本发明提供根据权利要求1的系统。于是,以六边形图案布置的网格点中的每个网格点可以被认为是呈六边形形状的单元或地砖的中心,所讨论的单元彼此交界。在任何情况下,利用本发明,部分地因为距离d比最大距离a
max
的2.0倍大的测量,保证了:如果两个车辆被定位成使得它们相应的竖直转向轴线直接位于彼此相距距离d的两个网格点的上方,并且在它们相应的转向轴线上同时转向,这些车辆和/或由这些车辆承载的产品(只要从上方看这些产品不从这些车辆的周边突出)就不会彼此碰撞,因为当转动时,每个车辆停留在与所讨论的网格点相关联的六边形单元内。此外,网格点的网格的六边形定向提供的优点是,尽管有上述保证,但网格点的密度可以高于正方形单元的情况。此外,借助于网格点的六边形定向,移动区域内的两个网格点之间的由车辆所覆盖的距离可以更小。特别地,在车辆在给定网格点之间进行大量移动的情况下,在网格点的六边形定向的情况下的由车辆覆盖的总距离可以小于在网格点的矩形定向的情况下的由车辆覆盖的总距离。在本发明的上下文中,车辆在其中从第一网格点移动到第二网格点的条带不包括不与三个方向线中的一个平行延伸的直条带。
4.如果距离d比最大距离a
max
的2.2倍小,则可以特别有效地使用地板的区域。
5.一般而言,从上方看,如果每个车辆呈具有长度l和宽度b的矩形形状是有利的。该实施例不排除车辆的拐角是倒圆的或者矩形形状的四条边不是完全直的。
6.如果该车辆的宽度b与长度l的比在0.60至1.00与0.82至1.00之间,更优选在0.65至1.00与0.77至1.00之间,则该地板的区域可以特别地进一步有效地使用。
7.为了进一步降低与其他车辆碰撞的风险,在一个实施例中,距离d比车辆宽度的两倍大。该车辆的宽度是指从上方看该车辆在与该车辆的正常移动方向垂直的方向上的最大尺寸。从上方看,该最大尺寸有可能大于在与车辆的正常移动方向平行的方向上的车辆的最大尺寸。
8.本发明特别地但非排他地适于与这样的系统一起使用,在该系统中,车辆的承载构件被设计成在承载构件的第一状态下承载产品并且在承载构件的第二状态下卸载产品。因此,该系统非常适用于产品的分选。顺便说一句,应当注意的是,特别地,可以手动地对车辆装载产品,但原则上也可以手动地对产品进行卸载,在这种情况下,还可以明确地使承载构件刚性地连接到车辆的框架上,或者至少使承载构件不具有呈现前述的、相互不同的第一状态和第二状态的能力。
9.在一个实施例中,承载构件在第一状态中呈现水平取向并且在第二状态中呈现倾斜取向,以便在第二状态中使得产品在重力的作用下滑离承载构件。具有这种承载构件的车辆本身至少从公开出版物cn 208377742 u1和wo 2018/214673 a1中已知。
10.在一个替代性实施例中,该承载构件包括传送带或传送条带,该传送带或传送条带被设计成允许产品搁置在其上并且在该第一状态下保持静止并且在该第二状态下被驱动。具有这种承载构件的车辆本身至少从公开出版物cn 107963475和cn 107323572中已知。
11.为了使该系统适合于与其分选产品,在另一个实施例中,该系统设置有至少一个拾取位置,该拾取位置在移动区域内或直接邻近移动区域,用于由车辆的承载构件从拾取位置拾取和承载产品,并且该系统还设置有至少一个递送位置,该递送位置在移动区域内或直接邻近移动区域,用于由车辆的承载构件在递送位置卸载产品。拾取位置例如可以由设置在承载构件上方的传送带之类的传送器的端部形成,该传送器在拾取位置将产品输送到承载构件。特别地,如果车辆在传送器下方以与传送器相同的速度和相同的方向驱动,则车辆的承载构件的装载可以在车辆驱动的同时发生。递送位置也可以由传送器的端部形成,其中产品被卸载到传送器的端部上并因此由传送器带走。
12.如果至少一个递送位置包括地板中的孔,其中在另一个实施例中,斜槽连接到地板中的孔,则可以获得处于递送位置的系统的适当实施例。
13.本发明还适于与这样一种系统一起使用,在该系统中,该车辆被用于将带有或不带有产品的保持构件临时储存在移动区域内的储存位置中。这样的保持构件从前述公开出版物us 7912574 b2中已知并且在其中由附图标记30表示。所讨论的保持构件可以被描述为腿部上的框架,其中车辆可以在腿部之间和框架下方驱动,并且因此可以在腿部离开地板的情况下将框架向上提升。可替代地,保持构件还可以采取托盘的形式,例如,特别是用于行李的物品。根据第二方面,本发明提供了根据权利要求12的用于这种用途的系统。x
max
大于a
max
的测量意味着保持构件确定圆的直径,具有由车辆的承载构件承载的保持构件的车辆当在竖直转向轴线上转向时在该圆中移动。出于与在根据本发明的第一方面的系统的情况下距离d比最大距离a
max
的2.0倍大相对应的原因,在根据本发明的第二方面的系统的情况下,距离d比最大距离x
max
的2.0倍大。
14.如果距离d比最大距离x
max
的2.2倍小,则可以特别有效地使用地板的区域。
15.一般而言,如果从上方看,每个保持构件呈具有长度l和宽度b的矩形形状可能是有利的。
16.特别地,如果该保持构件的宽度b与长度l的比在0.60至1.00与0.82至1.00之间,更优选地在0.65至1.00与0.77至1.00之间,该地板的区域可以进一步被有效地使用。在一个实施例中,距离d比保持构件的宽度的两倍大,以便降低与其他车辆和/或与由其他车辆承载的保持构件碰撞的风险。保持构件的宽度是指当从上方看保持构件由车辆承载时保持构件在与车辆的正常移动方向垂直的方向上的最大尺寸。从上方看,该最大尺寸有可能大于保持构件在与车辆的正常移动方向平行的方向上的最大尺寸。
17.如果承载构件和保持构件被设计成在承载构件的第一状态下承载保持构件并且在承载构件的第二状态下卸载保持构件,则可以获得输送保持构件的有效方式。
18.更具体地,在一个实施例中,承载构件在第一状态下操作以将保持构件从地板提升,并且在第二状态下操作以在第二状态下将保持构件向下设置在其腿部上的地板上。具有可以呈现这样的第一状态和这样的第二状态的承载构件的车辆本身从us 7912574 b2中也是已知的并且由附图标记20表示。然而,该已知车辆的承载构件能够相对于车辆的框架在竖直旋转轴线上旋转。这对于本发明不是必要的,其结果是,具有根据本发明的第二方面的系统的车辆可以被制造得更简单,即具有不能旋转的承载构件。
19.为了使用该系统以便能够通过其在保持构件上临时存储产品,在另一实施例中,该系统在移动区域内设置有至少一个拾取位置,用于由车辆的承载构件在拾取位置处将保持构件从地板提升,并且该系统在移动区域内设置有至少一个递送位置,用于使保持构件在递送位置处向下设置在地板上。
20.如果保持构件被设计为可以容纳或不容纳产品的托盘,则车辆对保持构件的处理可以采取与车辆对产品的处理相同的方式进行,该产品直接由车辆的承载构件承载,如以上已经解释的。附带地,托盘也可以临时存储在移动区域内的存储位置中。
21.对于根据本发明的第一方面的系统和根据本发明的第二方面的系统两者,优选的是,所述多个车辆的至少一部分车辆的所述中央控制装置和/或所述车载控制装置被设计成允许车辆仅在至多五个接近方向上从邻近中间(interlying)网格点的网格点到达所述中间网格点,并且仅在至多五个离开方向上再次离开中间网格点前往邻近所述中间网格点的网格点,其中,所述相应的接近方向和离开方向彼此不相反。因此,防止在相互直接相反的方向上移动的两个车辆之间的碰撞。另一个优点是所需的计算能力低于如果允许接近方向和离开方向彼此相反时的计算能力。
22.其中可以使用根据本发明的系统的建筑物大部分不是六边形定向的,而是正交定向的,例如,因为支柱设置为以矩形图案彼此隔开规则距离。可以实现对地板区域的改进的使用,如果所述多个车辆的至少一部分车辆的所述中央控制装置和/或所述车载控制装置包括:在第一网格区域内的第一网格点的数字化的第一网格部分,其表示所述移动区域的第一部分,这些第一网格点根据第一六边形图案布置;并且包括:在第二网格区域内的表示移动区域的第二部分的网格点的数字化的第二网格部分,这些网格点根据第二六边形图案布置;并且包括第三区域,第三区域包括在第一网格区域和第二网格区域之间的至少一个网格点,其中第一六边形图案和第二六边形图案相对于彼此旋转一个角度。
23.如果该第一六边形图案和该第二六边形图案相对于彼此旋转30度的角度,导致该第一网格区域和该第二网格区域被定向成彼此成直角,则上述优点可以特别适用。
24.可以获得有效利用室内地板区域的替代方式,如果所述多个车辆的至少一部分车辆的所述中央控制装置和/或所述车载控制装置包括:在第一网格区域内的第一网格点的数字化的第一网格部分,其表示所述移动区域的第一部分,这些第一网格点根据第一六边形图案布置;并且包括:在第二网格区域内的表示所述移动区域的第二部分的网格点的数字化的第二网格部分,所述网格点根据矩形图案来布置,优选地根据正方形图案来布置;并且包括第三区域,所述第三区域包括在所述第一网格区域和所述第二网格区域之间的至少一个网格点。
25.为了降低车辆碰撞的风险和/或降低防止此类碰撞所需的计算能力,在一个实施例中,该系统包括多个递送位置,这些递送位置在移动区域内以规则图案成行地设置,这些行平行于这三个方向线延伸,并且其中,至少一行的网格点设置在相邻行的递送位置之间,其中该多个车辆的至少一部分车辆的中央控制装置和/或车载控制装置被设计成仅在一个移动方向上在一行的网格点上移动车辆。
26.部分地取决于系统的所需容量,在这种情况下可能在相邻行的递送位置之间设置两行的网格点,其中所述多个车辆的至少一部分车辆的所述中央控制装置和/或所述车载控制装置被设计为使车辆在所述两行的网格点中的第一行网格点和所述两行网格点中的第二行网格点上沿相反的移动方向移动,和/或在相邻行的递送位置之间设置单个行的网格点,因此,每对相邻行的递送位置不超过一行,其中,可选地,所述多个车辆中的至少一部分车辆的中央控制装置和/或车载控制装置被设计成使车辆在相邻行的网格点上沿相反的移动方向移动。
27.本发明进一步提供了一种用于使用根据本发明的第一方面的系统的方法,该方法包括以下连续步骤:
28.‑
使用车辆的承载构件从第三网格点拾取并承载产品,其中,从上方看,产品位于车辆的周边内;
29.‑
使带有所述产品的所述车辆在条带内从第一网格点移动到第二网格点,所述条带在所述第一网格点与所述第二网格点之间延伸,其中在所述第一网格点与所述第二网格点之间的直接连接线不与所述三个方向线中的一个平行延伸,其中所述条带由至少两个相互连接的直条带部分组成,所述直条带部分中的每一个与所述三个方向线中的一个平行并且在所述三个方向线中的一个的上方延伸。
30.在前面段落中的描述的上下文中,术语“条带”被理解为是指:当所述车辆从第一网格点移动到第二网格点时,从上方看由车辆覆盖的地板区域的那部分。在条带部分之间的连接处,更具体地在与两个不同方向线相交的网格点相关联的六边形单元中,车辆因此改变方向。在这种情况下,如果距离d以及车辆的形状和尺寸使得:尽管车辆同时转向和移动,车辆也不会突出超出所述六边形单元,则车辆可以同时移动并且在直条带部分的连接处的车辆的竖直转向轴线上转向。换言之,车辆在竖直转向轴线上转向时不必一定是静止的。
31.本发明还提供一种使用根据本发明第二方面的系统的方法,包括以下连续步骤
32.‑
使用车辆的承载构件从第三网格点拾取并承载保持构件;
33.‑
使带有所述保持构件的所述车辆在条带内从第一网格点移动到第二网格点,所述条带在所述第一网格点与所述第二网格点之间延伸,其中所述第一网格点与所述第二网格点之间的直接连接线不与所述三个方向线中的一个平行延伸,其中所述条带由至少两个相互连接的直条带部分组成,所述直条带部分中的每一个与所述三个方向线中的一个平行并且在所述三个方向线中的一个的上方延伸。
34.在前面段落的描述的上下文中,术语“条带”被理解为是指:当所述车辆从第一网格点移动到第二网格点时,被由车辆承载的保持构件覆盖从上方看的地板区域的部分。
35.将通过参考以下附图对根据本发明的系统的多个可能实施例的描述来更详细地解释本发明:
36.图1示意性地示出了从上方看的一个系统;
37.图2示出了从上方看的图1的一部分;
38.图3a、图3b示出了其上具有车辆的地砖的示例,用于比较的目的;
39.图4a、图4b示出了其上具有车辆的六边形地砖;
40.图5示出了其上具有车辆和产品保持器的六边形地砖;
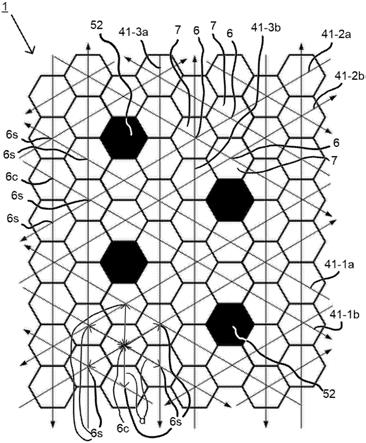
41.图6示出了从上方看的根据本发明的系统的另一个示例。
42.根据图1和图2的系统1展示了具有多个自动驾驶车辆3的移动区域2,这些自动驾驶车辆被设计成在移动区域2内移动。该移动区域2实际上是由地板(典型地是在大厅内的覆盖下方的地板)的一部分形成的。为了控制车辆3的移动,系统1设置有中央控制装置4,并且每个车辆3设置有车载控制器5(图4a)。中央控制装置4被设计成将控制信号无线地传输到各种车辆3的各种车载控制装置5,这些车载控制装置被设计成接收这些控制信号。车载控制装置5还可以被设计成:例如关于相关联的车辆3的位置来无线地发送信号,在这种情况下中央控制装置4被设计成接收这样的信号。
43.中央控制装置4包括网格点6的数字化网格,所述网格点6根据六边形图案布置并且表示移动区域2。每个网格点6可以被认为是由最多六个相邻网格点6s围绕的中心网格点6c,如图2中作为示例示出的两个中间网格点6c。对于这两个中间网格点6c中的一个,存在四个相邻网格点6s。对于另一中间网格点6c,存在六个相邻网格点6s。
44.中间网格点6c与每个相邻网格点6s之间的距离都相等,并且在图2中由附图标记d表示。相邻的相邻网格点6s之间的相应距离也等于逻辑上的d,因为每个相邻网格点6s也可以被认为是同样也由最多六个相邻网格点包围的中间网格点6c。
45.在这种情况下,网格点6的六边形图案意味着每个网格点6可以被认为是(虚拟的)六边形单元或地砖7的中心,其中彼此相对放置在一起的地砖7表示移动区域2,就像网格点6一样。地砖7为正六边形。假设中间网格点6c具有六个相邻网格点6s,相对于中间网格点6c彼此相对定位的三对相邻网格点6s限定三个方向线8
‑
1、8
‑
2和8
‑
3,这些方向线共同由附图标记8表示,如图1所示,用于一个网格点6。
46.中央控制装置4和/或车载控制装置5设计成使得车辆3专门平行于三个方向线8移动。该规则不排除:在车辆的移动方向从平行于三个方向线8中的一个的第一方向改变到平行于三个方向线8中的另一个的第二方向的情况下,车辆3的路径可以遵循弯曲路线而不是成角度路线。
47.以上意味着如果车辆3在移动区域2内从一个地砖7移动到另一个地砖7,这些地砖
在图1中通过举例的方式分别由附图标记7
‑
1和7
‑
2表示,其中与这些地砖7
‑
1、7
‑
2相关联的网格点6之间的直接连接线9不与三个方向线8中的一个平行,则车辆3将在条带上移动,该条带包括在拐角地砖7
‑
3中彼此连接的至少两个条带部分10
‑
1、10
‑
2。在拐角地砖7
‑
3中,条带部分10
‑
1和10
‑
2彼此围成120度的角度。车辆3以将在下面更详细地解释的方式在地砖7
‑
3上转动60度的角度。取决于车辆3在其间移动的两个地砖7的相对定位,拐角地砖7
‑
3上的该角度也可以是120度或180度。
48.图4a和图4b示出了地砖7,更具体地说是拐角地砖7
‑
3,车辆3在该拐角地砖7
‑
3上转向。为此,每个车辆3设置有两个车轮21a、21b,这两个车轮能够在各自的旋转轴线22a、22b上旋转,这些旋转轴线在车辆3的长度l的中间彼此共线地延伸。车轮21a、21b可以通过车载控制装置5彼此独立地被驱动,只要车轮21a、21b以相同的旋转速度在相关联的旋转轴线22a、22b上旋转,以便使车辆3在与车辆3的纵向方向平行的移动方向上移动,并且只要车轮21a、21b以相同的旋转速度但在相反的方向上在旋转轴线22a、22b上旋转,以便使车辆3在穿过车辆3的中部23的竖直旋转轴线上转向。应当注意,可以使用其他类型的车辆,例如设置有两个车轮的车辆,如车轮21a、21b,但是它们的中心轴线彼此不共线。相对于车轮21a、21b,车轮中的一个将朝向车辆的前方移动而车轮中的另一个将朝向车辆的后方移动。重要的是,所讨论的车辆在竖直转向轴线上是能够转向的,该竖直转向轴线从上方看时位于车辆周边内。同样重要的是,尽管车辆为了改变其方向而转向,但车辆仍停留在拐角地砖内,该拐角地砖是车辆在其中改变方向的地砖。这意味着如果拐角地砖对此足够大,或者换言之,车辆对此足够小,则车辆还可以沿着该拐角地砖移动并且同时转向。
49.车辆3的中心23与车辆3的周边上的点之间的最大距离是a
max
,在本示例中可以容易地推导出其尺寸,其中,使用勾股定理,从车辆3的长度l和从车辆3的宽度b,从上方观察,车辆3是矩形形状。基于上述,穿过车辆3的中心23的车辆3的对角线的尺寸等于a
max
的两倍。a
max
的尺寸相对于d的尺寸是这样的,在这种情况下,d等于a
max
的2.02倍。因此,可以确保:如果车辆3的中心23直接定位在与拐角地砖7
‑
3相关联的网格点6上方,则同时且以相同旋转速度但沿相反方向驱动轮21a、21b将导致车辆3在穿过中心23的竖直转向轴线上转向,导致车辆3正好位于拐角地砖7
‑
3的六边形周边内。因此可以保证:即使车辆3也同时在所述车辆3的中心23上转向,车辆3在穿过地砖7内的中心23的竖直轴线上的转向也不会导致与位于相邻地砖7上的车辆3的碰撞。
50.与根据网格点的正方形图案布置的正方形地砖相比,其中布置有网格点6的六边形图案以及由此产生的地砖7的六边形形状导致地砖7(即网格点6)的相对高的密度。这可以在图3a和图3b中看到,其中这样的正方形地砖被示出具有与结合图4a和图4b描述的车辆3相同类型和相同尺寸的车辆3。从图3a至图4b可以容易地推断出地砖61的面积大小等于d2,而地砖7的面积大小大约等于d2的0.87倍。车辆3可以在其上转向的相同数目的地砖7的所需面积因此大约是正方形地砖61将占据的面积的0.87倍。因此,网格点的六边形图案允许更有效地使用移动区域的面积。
51.网格点6的六边形图案进一步提供以下优点:平均而言,车辆3必须覆盖以在移动区域2内的两个地砖7之间移动的距离小于如果移动区域由正方形地砖61形成(其中仅有彼此垂直定向的两个方向线)则车辆3必须覆盖的距离。
52.为了防止车辆3之间的碰撞的上述目的,优选的是,车辆3的宽度b(或更一般地,在
平行于旋转轴线22a、22b的方向上测量的车辆3的最大尺寸)至多等于d,例如d的0.98倍。以这种方式,可以防止:车辆3在相互连接的地砖7上平行于三个方向线8中的一个方向线移动,并侵占位于所讨论的地砖7旁边的地砖7,其中另一车辆3例如可能正好在其竖直转向轴线上转动。
53.移动区域2包括围绕其周边的多个拾取位置51,该多个拾取位置51由特殊地砖7形成,其中在图1中存在菱形,位于这种地砖7上的车辆可以装载有待分选的产品,例如包裹或行李物品,例如手提箱。这种装载操作可以是手动的或自动的,其中所讨论的产品被放置在车辆3的承载构件(未更详细地示出)上,从上方看,该产品停留在车辆3的周边内。该承载构件可以例如由刚性地连接至车辆3的底盘的板或托盘形成。在产品已经被装载到车辆3上并且产品已经被从拾取位置51移动到形成用于产品的在移动区域2内的目的地位置的地砖7之后,然后可以将产品从车辆3上取下。
54.图1和图2将多个分选位置52示出为与移动区域2的周边相距一定距离的黑色地砖。分选位置52以六边形图案布置,其中在沿三个方向线8
‑
1、8
‑
2和8
‑
3中的任一个彼此相邻定位的分选位置之间存在两个地砖7。因此,地砖7的成对的两条路径41
‑
1a、41
‑
1b、41
‑
2a、41
‑
2b和41
‑
3a、41
‑
3b(统称为附图标记41)在分选位置52之间平行于方向线8延伸。由中央控制装置4和车载控制装置5形成的系统1的控制器被设计成使得车辆3仅在一对的两个路径上完全以相反的方向移动。路径41的这些相反方向在图2中由箭头表示。允许车辆3仅在一个方向上沿着路径41行驶导致控制车辆3所需要的降低的计算能力并且导致车辆3碰撞的较低风险。用于路径41的所述相反方向导致:车辆3有可能沿最多三个接近方向接近每个地砖7,并且定位在地砖7上的车辆3有可能沿最多三个离开方向离开地砖7,其中没有一个离开方向与接近方向中的一个相反。
55.可替代地,顺便提及的还有可能的是,例如在相邻的分选位置之间仅存在一个路径,在这种情况下,在所讨论的路径上的移动方向是交替的。
56.在该示例性实施例中,分选位置52采取地板中的孔的形式。斜槽连接到孔,孔的下端通向位于地板下方的水平面。因此,例如,可以经由相同的分选位置收集针对给定订单指定的所有产品。为此,车辆3的承载构件被设计为能够侧向倾斜的托盘。具有这种能够倾斜托盘的自动驾驶车辆例如从公开出版物cn 208377742 u1和wo 2018/214673 a1中已知,至少只要涉及能够倾斜托盘的描述,该文献的内容在此应当被认为并入本说明书中。当经由其承载构件装载车辆3时,所讨论的托盘被水平定向,如例如wo 2018/214673 a1中的图5和图6所示。然后,车辆3移动到位于分选位置52旁边的地砖7。一旦到达,车辆3的车载控制器5控制托盘,使其倾斜,从而使托盘呈现倾斜取向,在该倾斜取向上,所讨论的产品从托盘上滑落并落到所讨论的分选位置的斜槽上。此后,车载控制器5使托盘倾斜回到水平取向。
57.当将托盘倾斜到倾斜取向时,车辆3可能不准确地定位在地砖7上,而是替代地将车辆3定位在路径41内彼此相邻定位的两个地砖7上,如通过图1中的示例由车辆3
‑
1示出的,车辆3
‑
1可以从所示的位置将产品掉落到与分选位置52
‑
1相关联的地板中的孔中。特别地,但不是排他地,分类位置52的六边形形状也可能替代地围绕六边形形状的中心转动30度。
58.可替代地,还可以使车辆3配备有替代所述托盘的另一种类型的承载构件,特别是设置有传送带或者一个或多个传送条带的承载构件。具有这种承载构件的自动驾驶车辆例
如从公开出版物cn 107963475和cn 107323572中已知,至少只要涉及用于设计为传送带的产品的承载表面的描述,这些文献的内容在此应当被认为并入本说明书中。传送带也可以由两个或更多个平行传送条带代替。在任何情况下,在车辆3已经在拾取位置51处装载了产品3之后,然后,传送带或传送条带是静止的。特别是在自动装载的情况下,该传送带或传送条带将与用于产品的供料带同时被驱动,该供料带连接到车辆3的传送带或传送条带上。在靠近分选位置52(例如图1中的车辆3
‑
1所呈现的位置)的地砖处,传送带或传送条带由车辆3的车载控制器5在分选位置52的方向上驱动,使得所讨论的产品落到分选位置52/52
‑
1处的斜槽上。
59.本发明的有利原理也适用于临时存储系统,例如也在us 7912574 b2中描述的临时存储系统。一个重要的区别在于所使用的自动驾驶车辆不是决定性的,因为当车辆承载保持构件时,保持构件从所述车辆突出,所述保持构件可被认为是能够由车辆移动的搁架单元。这意味着保持构件的尺寸对于六边形地砖的尺寸的优化是决定性的。
60.图5示意性地示出了六边形地砖77的示例,该六边形地砖77具有与地砖7相同的尺寸,在其上具有车辆73,该车辆73借助于承载构件承载保持构件74,该承载构件能够上下移动并且能够借助于本地控制器75来控制。对于车辆73和能够上下移动的承载构件可以被配置的方式的详细描述,参见us 7912574 b2,并且更具体地参见图3a和图3b及其描述,这些部分在此至少应该被认为是结合在本描述中。从上方看,车辆73和保持构件74均为矩形,保持构件74的中心位于车辆73的中心76的正上方。车辆73能够在穿过其所述中心76的竖直转向轴线上以与车辆3相同的方式转动。
61.车辆73的中心76与车辆73的周边上的点之间的最大距离为a
max
,并且,保持构件74的中心与保持构件74的周边上的点之间的最大距离为x
max
。其适用于x
max
大于a
max
。由于类似于以上对于车辆3给出的那些原因,进一步适用的是:d等于x
max
的2.02倍,并且保持构件74的宽度至多等于d。
62.图6示出了根据本发明的设计用于分选产品的系统的移动区域102。所讨论的系统包括设计成类似于上述车辆3的车辆(在图6中未更详细地示出)。在图6中位于线103的任一侧上的移动区域102的部分在形状上是类似的。移动区域102的位于线103下方的部分以其整体示出,而移动区域102的位于线103上方的部分仅部分示出。考虑到移动区域102的所述部分之间的相似性,以下对移动区域102的位于线103下方的部分的描述就足够了。
63.由中央控制装置105和所使用的车辆3的车载控制装置5形成的系统的控制器将移动区域102模拟为第一网格区域110和第二u形网格区域111。第二网格区域111的u形的两个腿的自由端经由第三网格区域112和第四网格区域113连接到第一网格区域110。第一网格区域110和第二网格区域111各自包括以六边形图案布置的相应网格点的网格,每个网格点形成相应六边形地砖121、122的中心。与该第一网格区域110和该第二网格区域111相关联的该六边形图案相对于彼此旋转30度的角度,其结果是该第一网格区域110和该第二网格区域111可以被认为是被定向成彼此成直角。与第三网格区域112相关联的地砖123a、123b以及地砖124a、124b、124c和124d没有明确限定的形状并且足够大以使得车辆3能够在其中转向而不会在该过程中突出超出所讨论的地砖123、124的周边。
64.在各种地砖121
‑
124中,箭头示出了车辆3可以接近所讨论的地砖的接近方向以及车辆然后可以离开所述地砖的离开方向。由系统的控制器定义的地砖的相应接近方向和离
开方向决不会彼此相反。从箭头的方向清楚的是,控制器被设计成基本上在回转路径中移动车辆,在该回转路径中存在用于车辆3彼此通过的空间。
65.第一网格区域110中的地砖121
‑
1形成拾取位置,其中,例如借助于龙门式机器人(未更详细地示出)或在车辆3上方运行的供料传送带,车辆3可以装载有待分选的产品。车辆3从地砖121
‑
1移动到第三网格区域112。在第二网格区域11的u形的每个腿内,五个目的地位置122
‑
1设置在两个腿的彼此面对的侧面上。在每种情况下,在腿部的相邻目的地位置/地砖122
‑
1之间设置有单个地砖122。每个地砖122
‑
1可仅从直接位于上游的地砖122接近,并且车辆可仅离开地砖121
‑
1前往下游地砖122。沿着其中包括五个地砖121
‑
1的地砖122的路径131,地砖122的通过路径132设置在u形的腿部内的外侧上。目的地位置122
‑
1各自位于由附图标记127表示的相应分选位置旁边,这些分选位置例如可以是如以上参见图1和图2所描述的具有斜槽的地板中的孔的形式。因此,定位在目的地位置122
‑
1上的车辆3可以通过激活其承载构件而使承载构件上的产品掉落在所讨论的分选位置127处。
66.在可选实施例中,第二网格区域111也可以由具有根据矩形(例如正方形)图案布置的网格点的可选第二网格区域代替。
67.使用(其中网格点的图案不同于第一网格区域的网格点的图案的)第二网格区域使得能够连接移动区域内的不同取向的区域,例如由于移动区域位于其中的建筑物的结构。虽然第一网格区域和第二网格区域借助于其彼此连接的第三网格区域的地砖的形状将与第一网格区域和第二网格区域中的地砖的形状不同,但是这仍然在移动区域的面积使用的效率方面具有优势。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。