1.本发明属于海底监测领域,特别涉及一种海底滑坡深部变形原位实时监测装置及分析方法。
背景技术:
2.海底滑坡是指海底未固结松软沉积物或有软弱结构面的岩石,在重力作用下沿软弱结构面发生向下运动的现象,包括滑动、滑塌和碎屑流等地质过程,是广泛发生在大陆坡的一种重力流搬运机制。海底滑坡的形成受多种因素控制,一方面是由于沉积物内部结构和动力条件,包括海底沉积物中黏土物质含量较多、天然气水合物分解产生局部高压和水合物分解后自身强度降低等;另一方面,是某些外部因素诱发,如地震、海啸、火山和潮汐等。海底滑坡除直接危害海洋平台、海底光电缆、海底管道、港口、码头等设施外,大型海底滑坡还会引起海底泥石流,甚至会引发海啸、天然气水合物分解等次生灾害,造成严重的破坏损失。
3.在中国发明专利申请公开说明书cn105674945中公开了一种基于mems传感器的海底滑坡监测装置及监测方法,该发明中将传感器置于不锈钢长管中,以软连接管为关节带动长管及传感器弯曲,不锈钢材质与滑坡体的耦合性较差无法真实反映地层变动时的土体变形情况,而且通信线会在弯曲时候受力,当弯曲角度过大时通信线会有绷断危险,所以实际应用中弯曲角度很难从
‑
180
°
到180
°
。而且,该发明中mems传感器的保护膜为聚乙烯薄膜无法承受海底的高压,所以传感器在深海中无法正常使用不能用于监测深海滑坡。另外,该发明中传感器与数据处理器之间采用iic协议只能实现短距离通讯,无法大范围监测海底滑坡。
4.目前对于滑坡的监测多用于陆上,而应用于海底滑坡的研究较少。对海底滑坡的探测多是定性分析海底滑坡的成因机制、分布范围及形态特征等,缺少原位长期的海底滑坡观测装置和设备。由于海底环境的复杂性,尤其对于深海环境需要考虑设备的密封高压性能、电源长期供电等,而且海床地层变化过程缓慢而且细微,涉及的地域范围广,采用人工方式定时定点观测和记录,工作量大、耗资高,且不具有实时性和长期连续观测性。随着深水陆坡区天然气水合物等油气资源的大量发现以及海底工程的不断建设,提出一种海底滑坡深部变形原位实时监测装置及分析方法对海底滑坡进行原位长期实时监测,对海洋地质灾害的监测预警技术研究具有重要的作用和意义。
技术实现要素:
5.为了克服已有陆上滑坡地质灾害监测装置结构复杂、工程量庞大、监测范围小、数据精确度低的不足,本发明提供一种海底滑坡深部变形原位实时监测装置及分析方法,它能够对上千米深度的海床实现地层变形原位监测和上位机实时可视化显示,进一步对海底滑坡、天然气水合物分解引起的地形沉降、地震等地质灾害监测及预警提供技术支持。
6.第一方面,本发明公开了一种海底滑坡深部变形原位实时监测装置,包括长软管、
监测单元、处理单元和上位机,所述监测单元包括若干个监测子单元,所述处理单元包括数据处理器;
7.若干个监测子单元沿长软管的长度方向安装在长软管内并且长软管两端密封,每个监测子单元包括两个相互正交的mems加速度计,所述长软管内的mems加速度计与数据处理器连接,数据处理器与上位机连接。
8.优选的,还包括保护舱,所述保护舱包括监测子单元保护舱,监测子单元保护舱设有若干个并且与监测子单元数量相等,每个监测子单元对应安装在一个监测子单元保护舱内,并且监测子单元保护舱固定在长软管内。
9.优选的,所述监测子单元还包括减震片,mems加速度计通过减震片固定在监测子单元保护舱内。
10.优选的,所述保护舱还包括处理单元保护舱,所述处理单元安装在处理单元保护舱内。
11.优选的,所述处理单元还包括电源模块,电源模块分别与数据处理器、mems加速度计连接,为数据处理器和mems加速度计供电。
12.优选的,监测子单元保护舱外侧和处理单元保护舱外侧分别设有第一水密接插件和第二水密接插件,若干个监测子单元保护舱内的mems加速度计之间通过第一水密接插件相串联连接后与第二水密接插件连接,第二水密接插件与处理单元保护舱内的数据处理器连接。
13.优选的,所述长软管的材料为聚氯乙烯,在外力作用下弯曲变形,弯曲角度范围为
‑
180
°
到180
°
。
14.优选的,所述长软管内设有若干个安装槽位,若干个监测子单元保护舱之间通过钢丝相连并对应固定在长软管的安装槽位上;所述长软管内部充满液压油、并且一端设有内螺纹并与密封端盖外螺纹配合,另一端自密封。
15.优选的,每个监测子单元内部集成有两个监测轴z方向相互正交的mems加速度计。
16.另一方面,本发明还提供了一种海底滑坡深部变形原位实时监测装置的分析方法,其特征在于:包括:mems加速度计产生传感数据并传输至数据处理器,数据处理器对获取的数据进行分析,包括以下步骤:
17.步骤(1):数据处理器获取mems加速度计得到的传感数据;
18.根据重力场下,三轴加速度计在静态或者匀速情况下只感应重力加速度,所述的重力加速度和三轴加速度计在三个敏感轴上的重力分量通过公式(1)表达:
[0019][0020]
其中,g为常数,是当地重力加速度的值;a
x
,a
y
,a
z
是重力加速度在mems加速度计的三个相互正交的监测轴方向上的分量;
[0021]
步骤(2):去除异常值:计算mems加速度计在同一时刻得到的三轴加速度值的模,如果该模值与当地的重力加速度值相差大于1,则认为该值是异常的,此次的数据去除;
[0022]
步骤(3):以mems加速度计自身为基准建立传感器坐标系x
b
y
b
z
b
,大地坐标系x
o
y
o
z
o
,当地层发生运动时,传感器自身也发生变动,根据重力场中重力加速度在加速度计三轴(a
x
,a
y
,a
z
)的分量可以计算出加速度计的倾斜角θ,通过公式(2)表达:
[0023][0024]
步骤(4):加速度计在相对大地坐标系中o
y
和o
y
方向的倾斜角度求解其在该方向上的偏移量:相邻加速度计的间距是固定的,为l,以最底端的加速度计p0为基准点,在地层变动时,其上方的加速度计p1可以看成是以加速度计p0为圆心的圆弧上运动,因此,相邻传感器p
i
p
i 1
构成的弧的圆心角α
i
可以通过公式(3)表达:
[0025]
α
i
=θ
i 1
‑
θ
i
ꢀꢀꢀꢀ
(3)
[0026]
其中,θ
i 1
和θ
i
分别为第i 1个加速度计p
i 1
和第i个加速度计p
i
的倾斜角,
[0027]
第i段圆弧的半径可以通过公式(4)表达:
[0028]
r
i
=l/α
i
ꢀꢀ
(4)
[0029]
圆心c
i
在以加速度计p
i
为原点的坐标系中的坐标可以表示为:c
i
=[0,0,r
i
]
t
,当α
i
≠0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(5)表示:
[0030][0031]
当α
i
=0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(6)表示为:
[0032]
l代表弧长(6)
[0033]
因此,p
i 1
在大地坐标系o为原点中的坐标可以通过公式(7)表示:
[0034][0035]
其中,是以为原点的坐标系在大地坐标系(o为原点)中的表达,
[0036]
步骤(5):重复步骤(3)可以得到所有加速度计的倾斜角θ
i
以及相对于前一个加速度计的倾斜角δθ
i
,由于一个监测子单元中有两个相互垂直的mems加速度计,所以重复步骤(4)可以计算得到地层变动后在同一监测子单元在o
x
和o
y
两个方向上的偏移量ε
xi
和ε
yi
,通过公式(7)和公式(8),可以获得所有监测子单元在空间中的偏移量ε
i
和偏移方向ε
θi
,
[0037][0038]
ε
θi
=arctan(ε
yi
/ε
xi
)
ꢀꢀꢀꢀꢀ
(9)
[0039]
其中,ε
xi
和ε
yi
分别表示第i个传感器在o
x
和o
y
两个方向上的偏移量,ε
i
表示第i个传感器在空间中总的偏移量,ε
θi
表示第i个传感器在空间中的偏移方向与o
x
的夹角。
[0040]
下面对本技术做进一步说明:
[0041]
为解决技术问题,本发明的解决方案如下:提供了一种海底滑坡深部变形原位实时监测装置,包括监测单元、连接单元、处理单元、保护舱、上位机:
[0042]
所述的监测单元由n个串联的监测子单元组成;所述的监测子单元包括mems加速度计、ttl
‑
485模块和减震片;所述mems加速度计通过减震片固定在保护舱内;
[0043]
所述连接单元包括水密接电缆、钢丝、长软管和密封端盖;所述长软管内部充满液
压油并且一端有内螺纹并与密封端盖外螺纹配合,另一端自密封;所述连接单元将所有子处理单元(即监测子单元)和处理单元以及处理单元和上位机连接;所述监测单元和处理单元均放置在保护舱内;所述监测单元监测的数据信息传递给处理单元;处理单元将处理后的数据信息传递给上位机。
[0044]
所述上位机接收到处理单元传递的数据将进行可视化处理,实现海底滑坡状态深部变形量的实时显示与动画展示;
[0045]
所述处理单元包括数据处理器和电源模块;所述电源模块包括电池和稳压模块;所述电源模块为数据处理器和mems加速度计提供工作电压;所述数据处理器将处理后的数据传递给上位机。
[0046]
所述保护舱包括监测子单元保护舱和处理单元保护舱;所述监测单元和处理单元分别封装于对应的保护舱中。
[0047]
进一步的,所述长软管的材料为聚氯乙烯,在外力作用下能够朝任何方向弯曲变形,弯曲角度范围为
‑
180
°
到180
°
。
[0048]
进一步的,所述钢丝通过监测子单元保护舱连接所有监测子单元并将其固定在长软管中的槽位上,在地层变形过程中能够避免水密接电缆承受拉力。
[0049]
进一步的,所述监测子单元内部集成有两个监测轴z方向相互正交的mems加速度计(也就是:每个监测子单元的其中一个mems加速度计与大地坐标x
o
轴平行、另一个mems加速度计与大地坐标y
o
轴平行),所述的mems加速度计的数据采集和传输速率为9600baud。
[0050]
进一步的,所述的监测子单元通过连接单元连接好后置于长软管中,长软管安装在预先打好的海床底的钻孔中,当海床面及各地层发生变动时,mems加速度计也随之发生倾斜变化,产生传感数据;
[0051]
提供一种海底滑坡深部变形原位实时监测分析方法,包括以下步骤:
[0052]
步骤(1)数据处理器获取mems加速度计(以下简称“加速度计”)得到的传感数据;
[0053]
根据重力场下,三轴加速度计(即mems加速度计)在静态或者匀速情况下只感应重力加速度,所述的重力加速度和三轴加速度计在三个敏感轴上的重力分量通过公式(1)表达:
[0054][0055]
其中,g为常数,是当地重力加速度的值;a
x
,a
r
,a
z
是重力加速度在mems加速度计的三个相互正交的监测轴方向上的分量;
[0056]
步骤(2):去除异常值:计算mems加速度计在同一时刻得到的三轴加速度值的模,如果该模值与当地的重力加速度值相差大于1,则认为该值是异常的,此次的数据去除;
[0057]
步骤(3):以mems加速度计自身为基准建立传感器坐标系x
b
y
b
z
b
,大地坐标系x
o
y
o
z
o
,当地层发生运动时,传感器(即mems加速度计)自身也发生变动,根据重力场中重力加速度在加速度计三轴(a
x
,a
y
,a
z
)的分量可以计算出加速度计的倾斜角θ,通过公式(2)表达:
[0058]
[0059]
步骤(4):加速度计在相对大地坐标系中oy和oy方向的倾斜角度求解其在该方向上的偏移量,相邻加速度计的间距是固定的,为l,以最底端的加速度计p0为基准点,在地层变动时,其上方的加速度计p1可以看成是以加速度计p0为圆心的圆弧上运动,因此,相邻传感器p
i
p
i 1
构成的弧的圆心角α
i
可以通过公式(3)表达:
[0060]
α
i
=θ
i 1
‑
θ
i (3)
[0061]
其中,θ
i 1
和θ
i
分别为第i 1个加速度计p
i 1
和第i个加速度计p
i
的倾斜角,
[0062]
第i段圆弧的半径可以通过公式(4)表达:
[0063]
r
i
=l/α
i (4)
[0064]
圆心c
i
在以加速度计p
i
为原点的坐标系中的坐标可以表示为:c
i
=[0,0,r
i
]
t
,当α
i
≠0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(5)表示:
[0065][0066]
当α
i
=0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(6)表示为:
[0067]
l代表弧长
[0068]
因此,p
i 1
在大地坐标系o为原点中的坐标可以通过公式(7)表示:
[0069][0070]
其中,是以为原点的坐标系在大地坐标系(o为原点)中的表达,具体可以写成:成:是pi在以加速度计p0为原点的坐标系中的坐标,是大地坐标系原点;
[0071]
步骤(5):重复步骤(3)可以得到所有加速度计的倾斜角θ
i
以及相对于前一个加速度计的倾斜角δθ
i
,由于一个监测子单元中有两个相互垂直的mems加速度计,所以重复步骤(4)可以计算得到地层变动后在同一监测子单元在o
x
和o
y
两个方向上的偏移量ε
xi
和ε
yi
;通过公式(7)和公式(8),可以获得所有监测子单元在空间中的偏移量ε
i
和偏移方向ε
θi
。
[0072][0073]
ε
θi
=arctan(ε
yi
/ε
xi
)
ꢀꢀ
(9)
[0074]
其中,ε
xi
和e
yi
分别表示第i个传感器在o
x
和o
y
两个方向上的偏移量,ε
i
表示第i个传感器在空间中总的偏移量,ε
θi
表示第i个传感器在空间中的偏移方向与o
x
的夹角。
[0075]
与现有技术相比,本发明的有益效果是:
[0076]
1.n个监测子单元在保护舱包裹下整体置于充满液压油的长软管中,长软管整体能够直接安装到预先打好的海底钻孔中保证mems加速度计初始角度符合最佳监测范围。当装置周围的海底地层发生变动时,将带动长软管弯曲移动,mems加速度计将会随着装置整体移动而移动,不同层次的加速度计将会把自身的姿态信息传递给数据处理器,经过数据处理器分析处理之后传递给上位机,最终上位机将进行可视化处理,将地层深部位移变形信息进行重构并展示。
[0077]
2.本发明在数据处理器获得加速度计采集到的数据之后,对数据先进行预处理和多级判别将异常值去除。而且,由于海水温度相比于陆地温度较低,对于深海海底就相差更大,在mems加速度计封装到保护舱前会对所有加速度计进行温度校准和精细校准与补偿,减小了误差和零点漂移,提高了数据得精确度。
[0078]
3.本发明装置结构简单、操作方便、成本低、功耗低、监测范围广、监测精度高、实时性强,在低功耗模式下,可用于海底滑坡原位实时监测长达六个月以上,而且装置还具有制造简单、方便携带和布放的优点。
附图说明
[0079]
为了更清楚的说明本发明实施例或现有技术的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍。应当理解,以下附图仅显示本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0080]
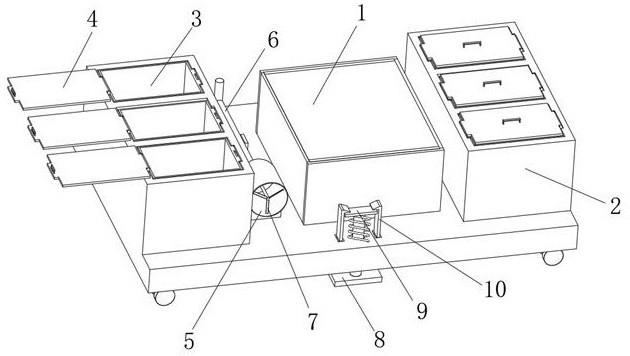
图1是本发明的系统结构示意图;
[0081]
图2是本发明监测子单元保护舱的截面图;
[0082]
图3是本发明处理单元保护舱的截面图;
[0083]
图4是本发明的系统工作原理图;
[0084]
图5是监测子单元变动时倾斜角和偏移量计算示意图(其中图5
‑
1是监测子单元变动时倾斜角示意图,图5
‑
2是监测子单元变动时偏移量计算示意图);
[0085]
图6是地层变动时各个子单元的倾斜变动示意图(其中,图6
‑
1是地层变动前各个监测子单元的mems加速度计示意图,图6
‑
2是地层变动时各个监测子单元的mems加速度计的倾斜变动示意图);
[0086]
图中的附图标记:11
‑
mems加速度计(110‑
11
n
和110’
‑
11
n’分别表示n个监测子单元中两个相互正交的mems加速度计);12
‑
ttl转485模块;13
‑
减震片;21
‑
水密接电缆;22
‑
钢丝;23
‑
长软管;24
‑
密封端盖;3
‑
处理单元;31
‑
电源模块;32
‑
数据处理器;41
‑
监测子单元保护舱;42
‑
处理单元保护舱;5
‑
上位机。
具体实施方式
[0087]
下面结合附图和具体实施对本发明作进一步详细说明。
[0088]
如图1所示,首先本发明提供了一种海底滑坡深部变形原位实时监测装置,包括监测单元1、连接单元2、处理单元3、保护舱4和上位机5。其中所处的监测单元1由n个串联的监测子单元组成;所述连接单元2将所有监测子单元和处理单元3连接、以及处理单元3和上位机5连接。所述保护舱4包括监测子单元保护舱41和处理单元保护舱42,所述监测子单元保护舱41设有n个并且与监测子单元数量相等。所述监测单元1的监测子单元和处理单元3分别封装于监测子单元保护舱41和处理单元保护舱42中。所述监测单元1监测的数据信息传递给处理单元3,处理单元3将处理后的数据信息传递给上位机5。
[0089]
所述的监测子单元包括mems加速度计11、ttl
‑
485模块12(接口模块,ttl
‑
485是一种硬件接口形式)和减震片13,所述mems加速度计11通过减震片13固定在监测子单元保护舱41内,监测子单元保护舱41外侧还设有第一电缆21
‑
1;其中,每个监测子单元的mems加速
度计设有两个且这两个mems加速度计相互正交。从长软管最底端的监测子单元依次向上命名mems加速度计,为mems加速度计110、mems加速度计110’
,mems加速度计111、mems加速度计111’
直至mems加速度计11
n
、mems加速度计11
n’,如图6所示,以大地坐标系xoyozo为坐标,从0
‑
n mems加速度计相平行设置并与大地坐标系x
o
轴平行,从0
’‑
n’mems加速度计相平行设置并与大地坐标系y
o
轴平行。
[0090]
每个监测子单元保护舱41内的两个mems加速度计与其上的第一水密接电缆21
‑
1连接,故长软管23内的所有监测子单元保护舱的mems加速计之间通过第一水密接电缆21
‑
1相连接后与处理单元保护舱42的第二水密接电缆21
‑
2连接,第二水密接电缆21
‑
2与数据处理器32连接,然后数据处理器32还通过第二水密接电缆21
‑
2与上位机5连接。进一步的,每个监测子单元保护舱41内的mems加速度计是通过ttl
‑
485模块12、第一水密接插件21
‑
1、第二水密接插件21
‑
2与处理单元保护舱的数据处理器32连接的。
[0091]
所述钢丝22通过监测单元子保护舱41上通孔(即图2中的钢丝槽所指的位置)连接所有监测子单元并将其固定在长软管中的槽位上,在地层变形过程中能够避免水密接电缆承受拉力。长软管23的一端自封,另一端通过密封端盖24将所有的监测子单元保护舱41密封在其内。
[0092]
所述的监测单元1通过水密接电缆和钢丝22连接好后置于长软管23中,长软管23安装在预先打好的海床底的钻孔中,当海床面及各地层发生变动时,mems加速度计也随之发生倾斜变化,产生传感数据。
[0093]
所述处理单元保护舱42内安装有处理单元3,处理单元保护舱外侧设有第二水密接电缆21
‑
2,所述处理单元3包括电源模块31和数据处理器32;所述电源模块31包括电池和稳压模块;所述电源模块31为数据处理器32和长软管内所有的mems加速度计提供工作电压,其中,电源模块31为长软管内所有的mems加速度计提供工作电压时可以通过第二水密接电缆连接供电;所述数据处理器32将处理后的数据传递给上位机5。
[0094]
如图4所示,电源模块与mems加速度计和数据处理器连接,为mems加速度计和数据处理器供电,mems加速度计与数据处理器连接,数据处理器与上位机连接。
[0095]
第二方面,本技术提供了一种海底滑坡深部变形原位实时监测装置的分析方法,包括:长软管内的所有mems加速度计获得传感数据并将得到的传感数据传输至数据处理器,所述数据处理器32分析获取的数据,包括以下步骤:
[0096]
步骤(1):数据处理器获取mems加速度计(以下简称“加速度计”)得到的传感数据;
[0097]
根据重力场下,三轴加速度计在静态或者匀速情况下只感应重力加速度,所述的重力加速度和三轴加速度计在三个敏感轴上的重力分量通过公式(1)表达:
[0098][0099]
其中,g为常数,是当地重力加速度的值;a
x
,a
y
,a
z
是重力加速度在mems加速度计的三个相互正交的监测轴方向上的分量;
[0100]
步骤(2):去除异常值:计算mems加速度计在同一时刻得到的三轴加速度值的模,如果该模值与当地的重力加速度值相差大于1,则认为该值是异常的,此次的数据去除;
[0101]
步骤(3):以mems加速度计自身为基准建立传感器坐标系x
b
y
b
z
b
,大地坐标系x
o
y
o
z
o
,当地层发生运动时,传感器(即mems加速度计)自身也发生变动,根据重力场中重力加速度在加速度计三轴(a
x
,a
y
,a
z
)的分量可以计算出加速度计的倾斜角θ,通过公式(2)表
达:
[0102][0103]
步骤(4):加速度计在相对大地坐标系中o
y
和o
y
方向的倾斜角度求解其在该方向上的偏移量,相邻加速度计的间距是固定的,为l,以最底端的加速度计p0为基准点,在地层变动时,其上方的加速度计p1可以看成是以加速度计p0为圆心的圆弧上运动;因此,相邻传感器p
i
p
i 1
构成的弧的圆心角α
i
可以通过公式(3)表达:
[0104]
α
i
=θ
i 1
‑
θ
i
ꢀꢀꢀꢀ
(3)
[0105]
其中,θ
i 1
和θ
i
分别为第i 1个加速度计p
i 1
和第i个加速度计p
i
的倾斜角;
[0106]
第i段圆弧的半径可以通过公式(4)表达:
[0107]
r
i
=l/α
i
ꢀꢀꢀ
(4)
[0108]
圆心c
i
在以加速度计p
i
为原点的坐标系中的坐标可以表示为:c
i
=[0,0,r
i
]
t
,当α
i
≠0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(5)表示:
[0109][0110]
当α
i
=0时,p
i 1
在以加速度计p
i
为原点的坐标系中的坐标可以通过公式(6)表示为:
[0111]
其中,l代表弧长;
[0112]
因此,p
i 1
在大地坐标系o为原点中的坐标可以通过公式(7)表示:
[0113][0114]
其中,是以为原点的坐标系在大地坐标系(o为原点)中的表达,具体可以写成:
[0115][0116]
步骤(5):重复步骤(3)可以得到所有加速度计的倾斜角θ
i
以及相对于前一个加速度计的倾斜角δθ
i
,由于一个监测子单元中有两个相互垂直的mems加速度计,所以重复步骤(4)可以计算得到地层变动后在同一监测子单元在o
x
和o
y
两个方向上的偏移量ε
xi
和ε
yi
;通过公式(7)和公式(8),可以获得所有监测子单元在空间中的偏移量ε
i
和偏移方向ε
θi
;
[0117][0118]
ε
θi
=arctan(ε
yi
/ε
xi
)
ꢀꢀꢀ
(9)
[0119]
其中,ε
xi
和ε
yi
分别表示第i个传感器在o
x
和o
y
两个方向上的偏移量,ε
i
表示第i个传感器在空间中总的偏移量,ε
θi
表示第i个传感器在空间中的偏移方向与o
x
的夹角。
[0120]
最后,需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。