技术特征:
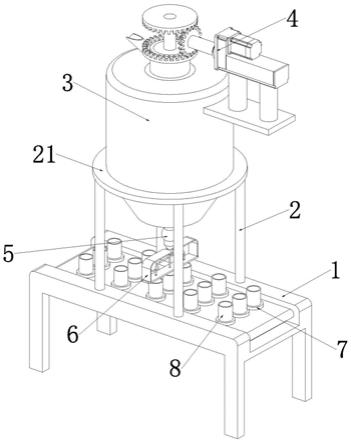
1.一种带升降机构的机器人播种和/或分拣系统,其特征在于,包括:储料单元,用于存放多类多件或者单类多件物料;物料输送单元,用于将物料从所述储料单元输出和/或将物料运输至所述储料单元中;视觉分析单元,视觉扫描范围至少包括所述物料输送单元的部分输送段,用于采集被输送物料的物料图像,据以分析并获取物料信息;所述物料信息包括物料的抓取点位置信息、抓取姿态信息和目标位置信息;机器人单元,与所述视觉分析单元通信连接;所述机器人单元接收所述物料的抓取点位置信息和抓取姿态信息,据以抓取所述物料并移送至升降式放料单元;所述升降式放料单元,与所述视觉分析单元通信连接;所述升降式放料单元沿转运货架单元的高度做升降运动,其在接收到所述目标位置信息后将物料提升至目标位置,并向所述转运货架单元中对应的货架放料;所述转运货架单元,设有多层货架,用于将物料转运至下游输送系统。2.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述抓取点位置信息和抓取姿态信息的获取方式包括:所述视觉分析单元通过扫描物料的外形轮廓来获取物料的空间几何信息,据以分析得到物料的抓取点位置信息和抓取姿态信息。3.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述目标位置信息的获取方式包括如下任一种或两种的组合:方式1)所述视觉分析单元通过扫描物料的外形轮廓获取物料的外形信息,并根据所述外形信息分析得到关联于物料的形状类别的目标位置信息;其中,所述转运货架单元设有多层货架,不同层的货架用于容纳不同形状类别的物料;方式2)所述视觉分析单元通过扫描物料表面的扫描码来读取物料的目标位置信息。4.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述升降式放料单元包括:升降机构;倒料机构,设于所述升降机构上,并由所述升降机构带动做升降运动;所述倒料机构用于承载物料,并在将物料带动至目标位置后将物料倒出;滑道机构,包括多层倾斜向下的滑道,供所述倒料机构倒入物料后滑出。5.根据权利要求4所述的机器人播种和/或分拣系统,其特征在于,所述倒料机构包括翻转机构或者传送带机构;所述翻转机构包括一或多个物料承载部,其在翻转后将物料倒入所述滑道机构;所述传送带机构将物料传入所述滑道机构。6.根据权利要求5所述的机器人播种和/或分拣系统,其特征在于,所述系统还包括:一或多个监控装置,用于监控物料是否正确地被放于对应的物料承载部中,以及/或者所述物料承载部在翻转后物料是否被倒入货架,以侦测物料的异常情况;其中,所述异常情况包括物料卡住和/或掉落。7.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述转运货架单元设有多层货架;每层货架的物料承托板倾斜向上设置。8.根据权利要求7所述的机器人播种和/或分拣系统,其特征在于,所述货架的货架格口设有光幕,用于侦测物料是否正确进入对应的格口;其中,所述转运货架单元中每个货架的货架格口设有独立的光幕;或者各列货架的货架格口共用一光幕;或者各行货架的货架
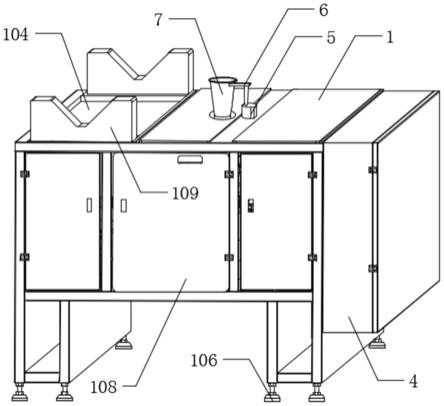
格口共用一光幕。9.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述系统还包括:底架,用于承载所述储料单元、物料输送单元、视觉分析单元、机器人单元、升降式放料单元和转运货架单元。10.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于:所述机器人单元在其操作的前向、后向、左向、有向中的一或多个方向上设有所述升降式放料单元和转运货架单元;以及/或者,所述机器人单元操作的左向和右向分别设有所述物料输送单元。11.根据权利要求1所述的机器人播种和/或分拣系统,其特征在于,所述输送单元包括滚筒输送线;所述机器人单元包括:多轴机器人、具有多个旋转关节的机器人或者delta机器人。
技术总结
本发明提供一种带升降机构的机器人播种和/或分拣系统,旨在提供一种基于机器人的自动拣选方案,实现了完全由自动化设备执行播种作业的功能,不仅作业效率大为提高、可承载物品重量增加,而且整个分拣过程的信息可追溯,实现全流程的控制和监管;分拣系统由于引入了机器人单元,大大扩展了设备的分拣能力;分拣系统还大大降低了错误率,避免传统的播种分拣系统中人工作业带来的失误操作或错误投单;而且由于操作人员的减少,作业流程得到了最大程度的精简,使企业的管理成本得到极大的降低。使企业的管理成本得到极大的降低。使企业的管理成本得到极大的降低。
技术研发人员:俞冠廷 周佳骥 张晓荣 马言平
受保护的技术使用者:星猿哲科技(上海)有限公司
技术研发日:2020.05.08
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。