1.本发明涉及智能垃圾回收技术领域,具体涉及一种智能废品回收垃圾桶。
背景技术:
2.随着国内经济突飞猛进的发展和人们生活水平的日渐提高,日益增长的垃圾产量面对严重滞后的垃圾处理措施,致使垃圾处理问题日益凸显。目前,国内针对生活垃圾的处理措施一般采用卫生填埋、焚烧、堆肥等无害化处理方式,有很多城市仍然通过简单地堆放填埋方式应对。垃圾填埋消耗着大量的土地资源,会导致周边环境臭气蔓延,污染土壤和地下水体,严重地恶化当地居民的正常生存环境。
3.实施垃圾分类收集是目前解决垃圾处理问题并实现可持续发展的大势所趋。实施垃圾分类能够大量减少生活垃圾的处理量,节省人力资源,降低处理设备的使用成本,减少土地资源的消耗,是增进社会经济价值、减少环境污染、创建节能环保型社会环境的重要手段。
4.目前,垃圾分类共分为以下四类:可回收物,厨余垃圾,有害垃圾,其他垃圾。居民在根据垃圾分类规则初步完成垃圾分类后,再由垃圾回收站对这四类垃圾分类进行回收。其中,可回收物主要包括废纸、塑料、玻璃、金属和布料五大类。因此还需要垃圾回收站对可回收物进行二次分类。但是垃圾回收站每天处理的垃圾量是巨大的,若要对可回收物进行二次分类则还需要安排额外的人手,不仅工作量大效率低,而且人力成本高昂。
技术实现要素:
5.本发明的目的在于提供一种智能废品回收垃圾桶,解决目前垃圾回收站对可回收物进行二次分类时,由于分类工作量大导致分类效率低,且人力成本高昂的问题。
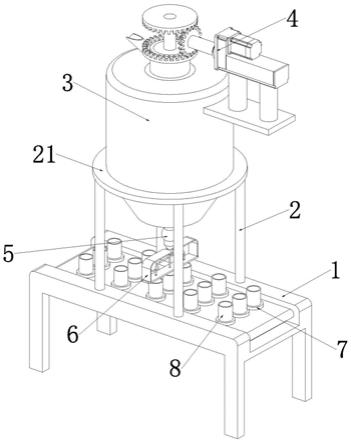
6.为了达到上述目的,提供了一种智能废品回收垃圾桶,包括垃圾桶本体,所述垃圾桶本体内部区分设置成垃圾图像识别区、垃圾称重区和垃圾回收区;所述垃圾图像识别区连接垃圾桶本体的投入口且内部设置有图像识别装置,所述垃圾称重区位于垃圾图像识别区下方且设置有称重台,所述称重台上设置有称重装置,所述垃圾回收区内设有助推装置、若干垃圾分类副桶和垃圾压缩装置;
7.所述图像识别装置用于对垃圾进行识别,并根据识别结果匹配对应的垃圾分类副桶;若干垃圾分类副桶彼此间且与称重台并排排列设置;所述助推装置用于在称重装置完成称重后将垃圾推入到对应的垃圾分类副桶;所述垃圾压缩装置位于若干垃圾分类副桶上方,包括若干并排排列设置的压缩组件,每个压缩组件分别对应一垃圾分类副桶;
8.所述压缩组件包括驱动单元和压缩板,所述压缩板与垃圾分类副桶的开口大小相契合,所述驱动单元用于带动压缩板上下移动,包括带动压缩板上表面与垃圾分类副桶上表面齐平的助推工位和压缩垃圾分类副桶内垃圾的压缩工位。
9.原理及优点:
10.1.垃圾图像识别区和图像识别装置的设置,可回收物在需要进行二次分类时,仅
需将可回收物从投入口投入即可,可回收物会进入到垃圾图像识别区,交由图像识别装置进行图像识别,基于现有视觉分析算法,可做到高精度高效率识别,从而提高可回收物的二次分类效果。
11.2.垃圾称重区和称重装置的设置,可回收物在分类识别完成后,即可落入垃圾称重区交由称重装置进行称重,称重完成后,可交由助推装置推送到对应的垃圾分类副桶中。通过称重,方便了解垃圾的质量,从而便于可回收物在后续阶段的快捷回收处理。而且通过了解垃圾的质量以便于启动垃圾压缩装置对垃圾进行压缩处理。
12.3.助推装置、若干垃圾分类副桶和垃圾压缩装置的设置,交由图像识别装置进行图像识别后,会得到识别结果。通过识别结果可以为垃圾分配对应识别结果的垃圾分类副桶。然后在称重装置完成称重后,会由助推装置将垃圾推入到对应的垃圾分类副桶。其中,由于若干垃圾分类副桶彼此间且与称重台并排排列设置、每个压缩组件分别对应一垃圾分类副桶,以及缩板与垃圾分类副桶的开口大小相契合,因此在确认好垃圾所需扔入的垃圾分类副桶后,位于目标垃圾分类副桶前侧的压缩组件会控制压缩板到达助推工位,使压缩板上表面与垃圾分类副桶上表面齐平,形成通道,方便助推装置将垃圾推到目标垃圾分类副桶中。而且当垃圾分类副桶中的垃圾达到一定质量时,压缩组件还可以控制压缩板到达压缩工位,对垃圾进行压缩处理,使得垃圾分类副桶能够装纳更多的垃圾。本方案的智能废品回收垃圾桶,仅需将垃圾扔入即可,垃圾识别分类、称重、推送到目标垃圾分类副桶和垃圾压缩均可全自动地完成,无需人工过多参与,可回收物进行二次分类的工作效率得到显著提高,也极大地降低了人力成本。
13.进一步,所述垃圾桶本体上设有翻转盖合在投入口上的翻转盖,所述翻转盖上设有接触传感器;所述图像识别装置包括摄像头、控制器、照明灯和托底组件,所述控制器用于在接触传感器被触发时,启动照明灯和摄像头采集托底组件上的垃圾的图像,并进行垃圾种类识别;所述托底组件用于在识别通过时将垃圾放置在称重装置上。
14.翻转盖、托底组件和接触传感器的设置,托底组件用于承托住扔入地垃圾,以方便对垃圾进行识别分类。在翻转盖将投入口盖合后,垃圾图像识别区形成封闭空间,可以排除识别过程中来自外界因素的干扰;同时接触传感器被触发,启动照明灯和摄像头,使得在封闭空间可采集更佳的图像信息,以方便提高识别效果。若识别分类成功,则交由托底组件将垃圾放置在称重装置上,以方便自动进行后续的称重流程,其自动化程度高,工作效率高。
15.进一步,所述托底组件包括承载台、支撑框架和带动支撑框架上下移动的第一电动伸缩杆,所述支撑框架包括竖钩型且平行设置的第一支架和第二支架;
16.所述第一支架和第二支架均包括竖直设置的短直部和长直部,所述短直部和长直部的内侧面均设置有滑槽,所述承载台水平设置且前后两侧面的两端部均固定设置有动力滚轮,所述动力滚轮设置在滑槽内;所述称重装置上表面设置有称重单元,所述称重单元包括称重传感器,所述称重传感器、第一电动伸缩杆和动力滚轮均与控制器电连接。
17.支撑框架的设置,由于支撑框架包括竖钩型且平行设置的第一支架和第二支架,第一支架和第二支架均包括竖直设置的短直部和长直部,短直部和长直部的内侧面均设置有滑槽,以及承载台的动力滚轮设置在滑槽内,使得整个承载台能上下移动,但不能脱离滑槽的限制。而第一电动伸缩杆的设置,则可以方便地将承载台放置在称重单元上。其中,若合理控制第一电动伸缩杆对支撑框架上下伸缩的距离,让动力滚轮位于滑槽的中部位置左
右,使得承载台的全部重量负载在称重单元上,支撑框架和承载台不再有受力关系,称重单元称得的质量信息减去承载台本身的重量信息即可得到承载台上垃圾的质量信息,从而方便地自动化完成垃圾的称重操作,极大地提高了自动化程度,提高了工作效率。
18.进一步,所述助推装置包括推板和用于驱动推板的推板驱动单元,所述推板竖直且滑动连接设置在承载台上,所述推板朝向若干垃圾分类副桶依次并排排列的方向,所述推板驱动单元与控制器电连接。
19.推板和推板驱动单元的设置,可以方便自动地将承载台上的垃圾推到垃圾分类副桶中,无需人工参与,自动化程度高。
20.进一步,所述第一支架和第二支架中短直部与长直部上均设置有等高度设置且用于在承载台完全放置在称重传感器上时,以供动力滚轮脱离滑槽的第一开口;
21.所述助推装置还包括第二电动伸缩杆和测距传感器,所述第二电动伸缩杆和测距传感器均设置在称重台上,所述第二电动伸缩杆用于将承载台助推到压缩组件中已到达助推工位的压缩板上,所述测距传感器用于测量与承载台的距离长度,所述第二电动伸缩杆和测距传感器均与控制器电连接,所述控制器用于判断距离长度是否达到预设距离值,若达到则控制动力滚轮停止和控制推板驱动单元启动。
22.第一开口的设置,可以在承载台完全放置在称重传感器上时,方便动力滚轮从第一开口脱离滑槽。第二电动伸缩杆和测距传感器的设置,第二电动伸缩杆可以将承载台助推到压缩组件中已到达助推工位的压缩板上,使得动力滚轮与压缩板接触,再交由动力滚轮作为主要动力,将承载台送到设定位置,具体由控制器来判断距离长度是否达到预设距离值,若达到则控制动力滚轮停止,同时启动推板驱动单元,将承载台上的垃圾自动地推送到设定的垃圾分类副桶中,无需人工参与,自动化程度高。
23.进一步,所述压缩板下表面设置压力传感器,以及与压缩板下表面上下滑动连接且可与压力传感器相接触的接触板,所述压力传感器与控制器电连接,所述控制器用于判断压力传感器的检测值是否达到预设压力值,若达到则停止驱动单元带动压缩板抵达的压缩工位。
24.压力传感器和接触板的设置,由控制器判断压力传感器的检测值是否达到预设压力值,若达到则停止驱动单元带动压缩板抵达的压缩工位,避免强制压缩导致设备损坏。
25.进一步,所述垃圾桶本体外设置有显示器,所述显示器与控制器电连接。
26.显示器的设置,可以方便人员了解设备内部流程信息。
27.进一步,所述第一支架和第二支架还包括连接短直部与长直部的连接部,所述连接部内侧面设置有条形槽,所述动力滚轮设置在条形槽内;所述条形槽一端设置有以供动力滚轮脱离条形槽的第二开口;
28.所述称重装置为称重移动小车且设置在称重台上,所述称重移动小车上设置有称重单元、推板和用于驱动推板的推板驱动单元;
29.所述助推装置还包括测距传感器,所述测距传感器均设置在称重台上,所述称重移动小车用于行驶到设定好的且已到达助推工位的压缩板上,所述测距传感器用于测量与称重移动小车的距离长度,所述称重移动小车和测距传感器均与控制器电连接,所述控制器用于判断距离长度是否达到预设距离值,若达到则控制称重移动小车停止和控制推板驱动单元启动。
30.第二开口的设置,方便在垃圾完成识别分类后,动力滚轮在条形槽内移动,使得承载台上的垃圾掉入到称重移动小车上。由称重移动小车上设置的称重单元进行称重。测距传感器的设置,用于测量与称重移动小车的距离长度,会由控制器来判断距离长度是否达到预设距离值,若达到则控制称重移动小车停止,同时启动推板驱动单元,将承载台上的垃圾自动地推送到设定的垃圾分类副桶中,无需人工参与,自动化程度高。
31.进一步,所述称重单元包括光耦传感器、激光传感器和速度测量传感器,所述光耦传感器、激光传感器和速度测量传感器均与控制器电连接。
32.光耦传感器、激光传感器和速度测量传感器的设置,可以测得垃圾的体积、下降速度,再通过计算模型即可得到垃圾的测算质量。
33.进一步,所述驱动单元还包括压缩板的初始工位,当压缩板位于初始工位时,所述压缩板上表面与条形槽的底面齐平。
34.压缩板在初始工位时可以形成一个支撑平台,承载台在向一侧移动后,支撑平台可以为承载台提供一定的支撑作用。
附图说明
35.图1为本发明实施例一中一种智能废品回收垃圾桶的正视向的局部剖视图;
36.图2为图1中的一种智能废品回收垃圾桶在称重流程阶段的局部剖视图;
37.图3为图1中为垃圾分类副桶的局部俯视图。
具体实施方式
38.下面通过具体实施方式进一步详细说明:
39.说明书附图中的标记包括:翻转盖1、垃圾桶本体2、承载台3、支撑框架4、第二电动伸缩杆5、测距传感器6、称重传感器7、第一垃圾分类副桶8、第二垃圾分类副桶9、第三垃圾分类副桶10、第四垃圾分类副桶11、第五垃圾分类副桶12、压缩板13、圆杆14、丝杠电机15、第一电动伸缩杆16、推板17。
40.实施例一
41.一种智能废品回收垃圾桶,基本如附图1、图2所示:包括垃圾桶本体2,所述垃圾桶本体2内部区分设置成垃圾图像识别区、垃圾称重区和垃圾回收区。
42.所述垃圾图像识别区连接垃圾桶本体2的投入口且内部设置有图像识别装置。所述垃圾桶本体2上设有翻转盖合在投入口上的翻转盖1,所述翻转盖1上设有接触传感器,本实施例中,接触传感器为霍尔传感器与磁铁的组合,当霍尔传感器与磁铁分开,然后霍尔传感器与磁铁再接触时,形成触发条件,表示垃圾已扔入且翻转盖1已盖上。所述图像识别装置包括摄像头、控制器、照明灯和托底组件,所述托底组件用于在识别通过时将垃圾放置在称重装置上。垃圾桶本体2外侧对应垃圾图像识别的位置设有显示器,所述显示器与控制器电连接。
43.所述托底组件包括承载台3、支撑框架4和带动支撑框架4上下移动的第一电动伸缩杆16,所述支撑框架4包括竖钩型且平行设置的第一支架和第二支架;所述第一支架和第二支架均包括竖直设置的短直部和长直部,所述短直部和长直部的内侧面均设置有滑槽,所述承载台3水平设置且前后两侧面的两端部均固定设置有动力滚轮,所述动力滚轮设置
在滑槽内,采用现有电机驱动,和第一电动伸缩杆16均由控制器控制。
44.所述垃圾称重区位于垃圾图像识别区下方且设置有称重台,所述称重台上设置有称重装置。所述称重装置上表面设置有称重单元,所述称重单元包括称重传感器7。托底组件用于在识别通过时将垃圾放置在称重传感器7上。称重传感器7电连接控制器。
45.所述垃圾回收区内设有助推装置、若干垃圾分类副桶和垃圾压缩装置。如图3所示,若干垃圾分类副桶彼此间且与称重台并排排列设置,例如垃圾分类副桶包括第一垃圾分类副桶8、第二垃圾分类副桶9、第三垃圾分类副桶10、第四垃圾分类副桶11和第五垃圾分类副桶12,第一垃圾分类副桶8最靠近称重台,主要收纳废纸类垃圾;第二垃圾分类副桶9主要收纳塑料类垃圾;第三垃圾分类副桶10主要收纳玻璃类垃圾,第四垃圾分类副桶11主要收纳金属类的铜材料垃圾;第五垃圾分类副桶12主要收纳金属类的铝材料垃圾。
46.所述助推装置包括推板17和用于驱动推板17的推板17驱动单元,所述推板17竖直且滑动连接设置在承载台3上,所述推板17朝向若干垃圾分类副桶依次并排排列的方向,所述推板17驱动单元与控制器电连接。本实施例中推板17驱动单元采用现有电机驱动,例如丝杠结构、齿轮传动结构等。
47.所述垃圾压缩装置位于若干垃圾分类副桶上方,包括若干并排排列设置的压缩组件,每个压缩组件分别对应一垃圾分类副桶;所述压缩组件包括驱动单元和压缩板13,所述压缩板13与垃圾分类副桶的开口大小相契合,所述驱动单元用于带动压缩板13上下移动,包括带动压缩板13上表面与垃圾分类副桶上表面齐平的助推工位和压缩垃圾分类副桶内垃圾的压缩工位。本实施例中驱动单元采用现有电机驱动,例如丝杠结构,丝杠电机15设置在垃圾回收区的顶部,丝杠电机15连接的丝杠竖直设置且穿过压缩板13的一端,压缩板13的另一端穿过设置的圆杆14。
48.所述第一支架和第二支架中短直部与长直部上均设置有等高度设置且用于在承载台3完全放置在称重传感器7上时,以供动力滚轮脱离滑槽的第一开口;
49.所述助推装置还包括第二电动伸缩杆5和测距传感器6,所述第二电动伸缩杆5和测距传感器6均设置在称重台上,所述第二电动伸缩杆5用于将承载台3助推到压缩组件中已到达助推工位的压缩板13上。第二电动伸缩杆5和测距传感器6均与控制器电连接。本实施例中,第二电动伸缩杆5端部设有电磁铁,承载台3与电磁铁的接触部位设有磁铁,第二电动伸缩杆5仅能短距离范围内伸缩,电磁铁与控制器电连接。
50.所述压缩板13下表面设置压力传感器,以及与压缩板13下表面上下滑动连接且可与压力传感器相接触的接触板,所述压力传感器与控制器电连接。
51.所述控制器包括以下模块:
52.图像识别模块:用于在接触传感器被触发时,生成启动照明灯和摄像头的控制信息,并在摄像头开启后采集托底组件上的垃圾的图像,再根据图像进行垃圾种类识别,输出识别结果,本实施例中,识别结果包括废纸、塑料、玻璃、金属铜和金属铝。
53.垃圾称重模块:用于在得到识别结果后,控制第一电动伸缩杆16向下移动,使承载台3完全放置在称重台的称重传感器7上,并且使动力滚轮与第一开口位于同一水平线上(动力滚轮位于滑槽的中部位置左右,使得承载台3的全部重量负载在称重单元上,支撑框架4和承载台3不再有受力关系);还用于通过称重传感器7采集垃圾和称重台的总质量信息,并根据承载台3的基本质量信息计算得到承载台3上垃圾的称重质量信息。
54.垃圾桶分配模块:用于根据识别结果匹配对应的垃圾分类副桶(即目标垃圾分类副桶),并生成垃圾推送位信息。所述垃圾推送位信息用于控制承载台3到达目标垃圾分类副桶前侧的垃圾分类副桶所对应的压缩板13上(控制承载台3行驶长度固定的路程,即承载台3与测距传感器6的距离长度固定),以方便将垃圾推送到目标垃圾分类副桶中。例如,扔入的垃圾为塑料瓶,那么识别结果为塑料,对应第二垃圾分类副桶9,因此位于第二垃圾分类副桶9前侧的第一垃圾分类副桶8所对应的压缩板13为承载台3的停止地点,此时承载台3与测距传感器6的距离长度固定。
55.助推准备模块:用于根据垃圾推送位信息,生成将位于目标垃圾分类副桶前侧的垃圾分类副桶所对应的压缩板13驱动到助推工位的助推控制信息。例如,扔入的垃圾为塑料瓶,那么识别结果为塑料,对应第二垃圾分类副桶9,因此位于第二垃圾分类副桶9前侧的第一垃圾分类副桶8所对应的压缩板13会被驱动到助推工位。
56.助推控制模块:用于在垃圾称重模块完成称重后,控制电磁铁断电,并启动第二电动伸缩杆5和动力滚轮,将承载台3助驱动到位于目标垃圾分类副桶前侧的垃圾分类副桶所对应的压缩板13上;还用于通过测距传感器6测量与承载台3的水平距离长度,并判断距离长度是否达到预设距离值,若达到则控制动力滚轮停止和控制推板17驱动单元启动。
57.复位模块:用于通过推板17驱动单元控制推板17反向移动复位,控制动力滚轮反向转动,以及控制电磁铁通电,使动力滚轮通过第一开口带动承载台3回到支撑框架4中,并在承载台3回到支撑框架4后,启动第一电动伸缩杆16。
58.压缩模块:用于在垃圾分类副桶对应的称重质量信息达到设定质量阈值时,启动垃圾分类副桶对应的压缩组件;用于判断压力传感器的检测值是否达到预设压力值,若达到则停止驱动单元带动压缩板13抵达的压缩工位。
59.结算统计模块:用于获取垃圾称重模块的称重质量信息,并将称重质量信息与对应的垃圾分类副桶相绑定且进行累积统计计算,得到累积统计数据;还用于获取垃圾分类副桶对应的丝杠电机15的驱动数据,用于根据丝杠电机15的驱动数据计算压缩板13在垃圾分类副桶中完成挤压垃圾后的位置数据,并将压缩板13的位置数据与垃圾分类副桶相绑定;还用于将各垃圾分类副桶的累积统计数据和压缩板13的位置数据展示到显示器上;还用于获取各垃圾分类副桶中对应垃圾的回收价格单价,并根据回收价格单价和累积统计数据对各垃圾分类副桶中对应的垃圾进行回收价值结算,得到回收价值结算数据。
60.云端推送模块:用于将结算统计模块的数据全部同步存储到云端,并将所述数据推送到智能终端;服务器还通信连接有智能终端,所述智能终端搭载有app,用于接收云端推送模块推送的数据。
61.实施例二
62.实施例二与实施例一的区别在于,所述第一支架和第二支架还包括连接短直部与长直部的连接部,所述连接部内侧面设置有条形槽,所述动力滚轮设置在条形槽内;所述条形槽右端侧面(对应长直部一侧)设置有以供动力滚轮脱离条形槽的第二开口;所述驱动单元还包括压缩板13的初始工位,当压缩板13位于初始工位时,所述压缩板13上表面与条形槽的底面齐平。
63.所述称重装置为称重移动小车且设置在称重台上,所述称重移动小车上设置有称重单元、推板17和用于驱动推板17的推板17驱动单元;所述称重单元包括光耦传感器、激光
传感器和速度测量传感器,所述光耦传感器、激光传感器和速度测量传感器均与控制器电连接。
64.所述助推装置仅包括测距传感器6,所述测距传感器6设置在称重台上,所述称重移动小车用于在已到达助推工位的压缩板13上行驶到设定好的位置,所述测距传感器6用于测量与称重移动小车的距离长度,所述称重移动小车和测距传感器均与控制器电连接。
65.垃圾称重模块:用于在得到识别结果后,控制动力滚轮转动并从第二开口离开支撑框架4,使得承载台3上的垃圾掉入到称重移动小车上,且承载台3局部位置行驶到相邻的压缩组件中位于初始工位的压缩板13上;还用于通过光耦传感器、激光传感器和速度测量传感器模拟计算垃圾的称重质量信息。
66.助推控制模块:用于在垃圾称重模块完成称重后,启动称重移动小车行驶到位于目标垃圾分类副桶前侧的垃圾分类副桶所对应的压缩板13上;还用于通过测距传感器测量与称重移动小车的距离长度,并判断距离长度是否达到预设距离值,若达到则控制称重移动小车停止和控制推板17驱动单元启动。
67.复位模块:用于在承载台3上的垃圾掉入到称重移动小车上时,控制动力滚轮逆向转动,并从用于通过第二开口回到支撑框架4;还用于垃圾推送到目标垃圾分类副桶后,通过推板17驱动单元控制推板17反向移动复位,以及控制称重移动小车反向移动回到称重台上。
68.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。