1.本发明涉及船舶运动控制领域,具体涉及装配两对减摇鳍船舶的减横摇影响领域,尤其涉及一种考虑尾涡影响的减摇鳍升力耦合系数计算方法。
背景技术:
2.船舶在海上航行时,受到海浪等外界干扰因素的影响,产生多自由运动,其中横摇运动带来的危害最为严重,减摇鳍的装配使船舶的减摇效果大幅度提升。对于装配两对减摇鳍的船舶,其减摇鳍在正常工作时,产生的雷诺数re较大,导致前鳍易产生尾涡脱落现象。在实际工程应用中,前后鳍间距和鳍体面积受到船体等外界因素的限制,无法随意增大或减小,故前鳍脱落的尾涡一般会对后鳍的水动力产生影响。由于前鳍依次脱落的尾涡旋转方向相反,造成后鳍升力的增大或减小,使系统对减摇鳍的控制产生偏差。因此,如何在考虑前后鳍耦合影响的前提下,求解后鳍升力计算误差,提升减摇鳍系统控制精度,成为亟待解决的难点。
3.论文《两对鳍系统优化控制方法的研究》、论文《装有两对鳍的减摇鳍耦合系数计算及减摇仿真》、论文《减摇鳍在船舶横纵摇控制中的应用研究》、论文《鳍
‑
船体适配性及其低航速控制策略研究》,提出的方案均能计算出前后鳍耦合系数,在一定程度上提高了减摇鳍系统的控制精度,但是均未分析前鳍尾涡对后鳍升力实时影响情况,未考虑尾涡呈周期性变化时对后鳍升力的干扰,未修正前鳍影响下的后鳍升力公式,本发明所述方法将前鳍脱落的尾涡与后鳍首次撞击处等效为质点,根据质点与鳍体平分线位置关系,分析前鳍尾涡对后鳍升力实时影响情况,考虑尾涡呈周期性变化时对后鳍升力的干扰,解得前鳍影响下的后鳍升力公式,在此基础上,求解出前后鳍升力耦合系数,从而判断前鳍产生的尾涡对后鳍升力的影响程度。
技术实现要素:
4.本发明的目的提出一种考虑尾涡影响的减摇鳍升力耦合系数计算方法,所述方法可修正前后鳍耦合造成的后鳍升力计算误差,针对周期性尾涡脱落现象,求解前后鳍升力耦合系数,对提升减摇鳍系统控制精度具有重要意义。
5.为了达到上述目的的要求,提出了一种考虑尾涡影响的减摇鳍升力耦合系数计算方法,具体包括以下步骤:
6.步骤1:抽象出减摇鳍尾涡干扰侧视示意图,减摇鳍弦长为d,鳍轴等效为o点,靠近鳍轴侧的前端等效为p点,远离鳍轴侧的后端等效为q点,直线pq为鳍体平分线,前鳍脱落的尾涡与后鳍首次撞击处等效为a点,相对来流速度为v0,鳍压力中心处横摇方向线速度为v
r
;
7.步骤2:在所述减摇鳍尾涡干扰侧视示意图上建立速度坐标系,以o点为坐标原点,水平向右的方向作为x轴正方向,竖直向上的方向作为y轴正方向,鳍体与x轴正方向夹角为鳍角记为α,当直线oq位于x轴下方时α<0,当直线oq位于x轴上方时α>0;
8.步骤3:前鳍脱落的尾涡对后鳍产生干扰并使其运动,产生的运动速度记为干扰速
度v,且v<v0,v与x轴正方向夹角为θ,v在x轴与y轴的分速度分别为v
x0
与v
y0
,v
x
为v
x0
与v0在x轴的合速度,v
y
为v
y0
与v
r
在y轴的合速度,此时v
x
与v
y
分别为:
[0009][0010]
式中:v
x0
满足等式v
x0
=vcosθ,v
y0
满足等式v
y0
=vsinθ;
[0011]
步骤4:v
x
与v
y
的合速度为v1,此时干扰鳍角β为:
[0012][0013]
式中:干扰鳍角β表示v1与x轴正方向夹角;
[0014]
步骤5:当前鳍产生的尾涡使后鳍升力减小时,此时单个后鳍产生的负干扰升力记为f
b
‑
,当前鳍产生的尾涡使后鳍升力增大时,此时单个后鳍产生的正干扰升力记为f
b
,产生f
b
‑
的情况有两种,情况一为前鳍脱落的尾涡为顺时针旋转、a点位于直线pq上方、v
y0
>v
r
且α<0,情况二为前鳍脱落的尾涡为逆时针旋转、a点位于直线pq下方、v
y0
>v
r
且α>0,满足情况一或情况二均会产生f
b
‑
,除去上述两种情况外的其它情况,后鳍产生的升力均为f
b
,产生的f
b
和f
b
‑
均可通过干扰鳍角求得;
[0015]
步骤6:由卡门涡街现象可知,当雷诺数re满足250<re<2
×
105且v
y0
>v
r
,水流经前鳍后,依次脱落旋转方向相反的尾涡,尾涡对后鳍的升力干扰呈周期性变化,前半个周期前鳍的干扰使后鳍的升力增大,后半个周期前鳍的干扰使后鳍的升力减小,此时单个后鳍产生的干扰升力f
b
为:
[0016][0017]
式中:ρ为海水密度,s为鳍体面积,为升力系数,与鳍型和安装位置有关,α
e
为有效正鳍角,且满足α
e
=|α| β,α
e
‑
为有效负鳍角,且满足α
e
‑
=|α|
‑
β,t为尾涡的脱落周期,且满足
[0018]
步骤7:单个前鳍产生的升力为f
a
,且满足此时前后鳍升力耦合系数为:
[0019][0020]
式中:λ为前后鳍升力耦合系数,表示前鳍产生的尾涡对后鳍升力的影响程度。
[0021]
本发明的有益效果有:
[0022]
1.提出一种考虑尾涡影响的减摇鳍升力耦合系数计算方法,所述方法计算精度
高、适用范围广且容易实现。
[0023]
2.本发明所述方法仅需要分析前鳍脱落的尾涡与后鳍首次撞击处等效点、干扰速度的竖直分量与鳍压力中心处横摇方向线速度大小关系,即可求解出尾涡对后鳍产生的正、负干扰升力,避免了直接求解后鳍升力的复杂性。
[0024]
3.针对周期性尾涡脱落现象,采用本发明所述方法,求解出前后鳍升力耦合系数,通过前后鳍升力耦合系数,可以直接确定前鳍脱落的尾涡对后鳍的影响程度。
[0025]
4.通过本发明所述方法,在减摇鳍弦长为2.94m,鳍体面积为3.59m2,相对来流速度为9.26m/s,鳍压力中心处横摇方向线速度为0.75m/s,干扰速度为2.96m/s,升力系数为0.78,鳍角为
‑
10
°
,干扰速度与x轴正方向的夹角为30
°
,雷诺数re为1
×
105,此时前鳍产生的尾涡呈周期性变化,求得尾涡的脱落周期为0.28s,前半个周期前鳍的干扰使后鳍升力增加了41.35%,后半个周期前鳍的干扰使后鳍升力降低了55.78%。
附图说明
[0026]
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
[0027]
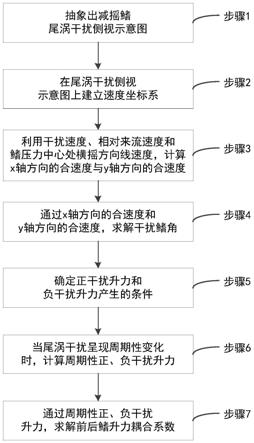
图1为一种考虑尾涡影响的减摇鳍升力耦合系数计算方法的过程示意图;
[0028]
图2为前鳍尾涡脱落时对后鳍产生干扰的示意图;
[0029]
图3为前鳍尾涡脱落时对后鳍产生正干扰升力的侧视分析图;
[0030]
图4为前鳍尾涡脱落时对后鳍产生负干扰升力的侧视分析图。
[0031]
图中:o为鳍轴等效点,a为前鳍脱落的尾涡与后鳍首次撞击处等效点,p为靠近鳍轴侧的前端等效点,q为远离鳍轴侧的后端等效点。
具体实施方式
[0032]
下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
[0033]
如图1所示,一种考虑尾涡影响的减摇鳍升力耦合系数计算方法的过程示意图。首先,抽象出减摇鳍尾涡干扰侧视示意图;在此基础上,建立速度坐标系,利用干扰速度v、相对来流速度v0和鳍压力中心处横摇方向线速度v
r
,计算x轴方向的合速度与y轴方向的合速度;其次,通过x轴方向的合速度与y轴方向的合速度,求解干扰鳍角;之后,区分产生正、负干扰升力的情况,经过分析得到单个后鳍周期性的正、负干扰升力,根据干扰鳍角进行求解;最后,通过单个后鳍周期性的正、负干扰升力,求得前后鳍升力耦合系数公式,评判前鳍产生的尾涡对后鳍升力的影响程度。
[0034]
如图2所示,前鳍尾涡脱落时对后鳍产生干扰的示意图。图中相对来流速度方向为水平向右,经过前鳍后,流体流速的大小和方向均发生改变,在实际工程应用中,流体产生的雷诺数一般较大,前鳍会依次脱落旋转方向相反的尾涡,即图中脱落的顺时针尾涡与逆时针尾涡,产生的尾涡会改变后鳍预期的升力,从而导致减摇鳍系统控制精度降低。
[0035]
如图3、图4所示,分别为前鳍尾涡脱落时对后鳍产生正干扰升力的侧视分析图、前鳍尾涡脱落时对后鳍产生负干扰升力的侧视分析图。图3为前鳍脱落的尾涡使后鳍升力增
大的情形,图4为前鳍脱落的尾涡使后鳍升力减小的情形。
[0036]
图3和图4中,o为鳍轴等效点,a为前鳍脱落的尾涡与后鳍首次撞击处等效点,p为靠近鳍轴侧的前端等效点,q为远离鳍轴侧的后端等效点,d为减摇鳍弦长,v0为相对来流速度,v
r
为鳍压力中心处横摇方向线速度,前鳍脱落的尾涡对后鳍产生干扰并使其运动,产生的运动速度记为干扰速度v,干扰速度v与x轴正方向的夹角为θ,鳍体与x轴正方向夹角为鳍角记为α,当直线oq位于x轴下方时α<0,当直线oq位于x轴上方时α>0,v在x轴与y轴的分速度分别为v
x0
与v
y0
,v
x0
与v
r
在x轴的合速度为v
x
,v
y0
与v0在y轴的合速度为v
y
,v
x
与v
y
的合速度为v1,v1与x轴正方向夹角记为干扰鳍角β。
[0037]
一种考虑尾涡影响的减摇鳍升力耦合系数计算方法,所述方法的过程示意图如图1所示,具体包括以下步骤:
[0038]
步骤1:抽象出减摇鳍尾涡干扰侧视示意图,结合图3可知,减摇鳍弦长为d,鳍轴等效为o点,靠近鳍轴侧的前端等效为p点,远离鳍轴侧的后端等效为q点,直线pq为鳍体平分线,前鳍尾涡脱落时对后鳍产生干扰的示意图如图2所示,前鳍脱落的尾涡与后鳍首次撞击处等效为a点,相对来流速度为v0,鳍压力中心处横摇方向线速度为v
r
;
[0039]
步骤2:在所述减摇鳍尾涡干扰侧视示意图上建立速度坐标系,结合图3可知,o点为坐标原点,水平向右的方向作为x轴正方向,竖直向上的方向作为y轴正方向,鳍体与x轴正方向夹角为鳍角记为α,当直线oq位于x轴下方时α<0,当直线oq位于x轴上方时α>0;
[0040]
步骤3:前鳍脱落的尾涡对后鳍产生干扰并使其运动,产生的运动速度记为干扰速度v,且v<v0,尾涡对后鳍的干扰示意图如图2所示,结合图3可知,v与x轴正方向夹角为θ,v在x轴与y轴的分速度分别为v
x0
与v
y0
,v
x
为v
x0
与v0在x轴的合速度,v
y
为v
y0
与v
r
在y轴的合速度,此时v
x
与v
y
分别为:
[0041][0042]
式中:v
x0
满足等式v
x0
=vcosθ,v
y0
满足等式v
y0
=vsinθ;
[0043]
步骤4:结合图3可知,v
x
与v
y
的合速度为v1,此时干扰鳍角β为:
[0044][0045]
式中:干扰鳍角β表示v1与x轴正方向夹角;
[0046]
步骤5:当前鳍产生的尾涡使后鳍升力减小时,此时单个后鳍产生的负干扰升力为f
b
‑
,当前鳍产生的尾涡使后鳍升力增大时,此时单个后鳍产生的正干扰升力为f
b
,当前鳍产生的尾涡不呈现周期性变化时,产生f
b
‑
的情况有两种,情况一为前鳍脱落的尾涡为顺时针旋转、a点位于直线pq上方、v
y0
>v
r
且α<0,情况二为前鳍脱落的尾涡为逆时针旋转、a点位于直线pq下方、v
y0
>v
r
且α>0,满足情况一或情况二均会产生f
b
‑
,除去上述两种情况外的其它情况,后鳍产生的升力均为f
b
,产生的f
b
和f
b
‑
均可通过干扰鳍角求得,单个后鳍产生的正干扰升力侧视分析图如图3所示,图3为正干扰升力的其中一种情形,单个后鳍产生的负干扰升力侧视分析图如图4所示,图4为负干扰升力的其中一种情形;
[0047]
步骤6:由卡门涡街现象可知,当雷诺数re满足250<re<2
×
105且v
y0
>v
r
,水流经前鳍后,依次脱落旋转方向相反的尾涡,尾涡对后鳍的升力干扰呈周期性变化,前半个周期
前鳍的干扰使后鳍的升力增大,后半个周期前鳍的干扰使后鳍的升力减小,此时单个后鳍产生的干扰升力f
b
为:
[0048][0049]
式中:ρ为海水密度,s为鳍体面积,为升力系数,与鳍型和安装位置有关,α
e
为有效正鳍角,且满足α
e
=|α| β,α
e
‑
为有效负鳍角,且满足α
e
‑
=|α|
‑
β,t为尾涡的脱落周期,且满足
[0050]
步骤7:单个前鳍产生的升力为f
a
,且满足此时前后鳍升力耦合系数为:
[0051][0052]
式中:λ为前后鳍升力耦合系数,表示前鳍产生的尾涡对后鳍升力的影响程度。
[0053]
此外,为了进一步说明本发明所述方法的技术方案,通过一种减摇鳍示例参数并结合图3和图4来说明,其中具体参数分别为:海水密度ρ为1000kg/m3,弦长d为2.94m,s为3.59m2,v0为9.26m/s,v
r
为0.75m/s,v为2.96m/s,为0.78,α为
‑
10
°
,θ为30
°
,雷诺数re为1
×
105。
[0054]
通过上述参数求得f
a
为3.07
×
104n,经本发明所述方法可知,此时产生的尾涡呈周期性变化,故t为0.28s,每隔半个周期后尾涡对后鳍产生的干扰效果相反(促进或抑制),当前鳍脱落的尾涡对后鳍的干扰情况如图3所示时,f
b
=4.33
×
104n,λ=0.4135,故前鳍的干扰使后鳍升力增加了41.35%;当前鳍脱落的尾涡对后鳍的干扰情况如图4所示时,f
b
‑
=1.36
×
104n,λ=
‑
0.5578,故前鳍的干扰使后鳍升力降低了55.78%。
[0055]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。