1.本发明属于管道加工设备技术领域,具体涉及一种螺旋焊管切割坡口一体设备及加工方法。
背景技术:
2.螺旋焊管是将低碳碳素结构钢或低合金结构钢钢带按一定的螺旋线的角度卷成管坯,然后将管缝焊接起来制成。螺旋焊管的生产工艺大致分为成型、内焊、外焊和切割4个工序,为实现对螺旋焊缝的焊接,在整个工序过程中,螺旋焊管具有径向旋转和轴向移动两种运动方式,因此,在进入到切割工序时,切割小车需要配合螺旋焊管轴向移动,使得切割枪头和螺旋焊管在轴向方向上相对静止,从而实现对螺旋焊管的圆环切割。
3.螺旋焊管在生产过程中,在切割分离后还需要对螺旋管口进行坡口切割,现有的生产工序切割焊管与切割管口坡口为分开的两道工序,分别需要在两种不同的设备上完成,增加了占用工位,且延长了生产周期,降低了生产效率。
技术实现要素:
4.本发明实施例提供一种螺旋焊管切割坡口一体设备及加工方法,能够将螺旋焊管的切割与开坡口一步完成且切割稳定效果好。
5.为实现上述目的,本发明采用的技术方案是:提供一种螺旋焊管切割坡口一体设备,包括:
6.承载平移台,所述承载平台用于支撑螺旋焊管并与螺旋焊管一起沿轴向移动;
7.切割机构,所述切割机构包括回转机构和设于所述回转机构的转动端的切割头,所述切割头朝向螺旋焊管内部,所述切割头的旋转中心垂直于螺旋焊管的中轴线,所述切割头用于在螺旋焊管上开孔并借助所述回转机构分别向两侧旋转预设角度切割坡口。
8.在一种可能的实现方式中,所述承载平移台的下端设有固定台,所述承载平移台通过第一直线模组在所述固定台上平移,所述第一直线模组包括用于驱动所述承载平移台动作的第一驱动组件和用于支撑并引导所述承载平移台往复直线移动的至少一套第一直线导轨。
9.一些实施例中,所述第一驱动组件包括:
10.第一电机,所述第一电机固定设于所述承载平移台上,所述第一电机的动作端设有第一齿轮;
11.第一齿条,所述第一齿条固定设于所述固定台且长度方向与螺旋焊管的轴向平行,所述第一齿条与所述第一齿轮啮合配合,以驱动所述承载平移台动作;
12.所述第一直线导轨的滑块固定于所述承载平移台的下端面,所述第一直线导轨的轨道固定于所述固定台的上端面,所述第一直线导轨的轨道的长度方向与螺旋焊管的轴向平行。
13.在一种可能的实现方式中,所述切割机构还包括:
14.立柱,所述立柱固定设于所述承载平移台上且位于螺旋焊管一侧;
15.所述回转机构通过第二直线模组在所述立柱侧面竖直平移,所述第二直线模组包括用于驱动所述回转机构动作的第二驱动组件和用于支撑并引导所述回转机构竖直往复直线移动的至少一套第二直线导轨;
16.所述切割头设于所述回转机构的转动端且位于螺旋焊管上方。
17.一些实施例中,所述回转机构的转动端和所述切割头之间还设有第三直线模组,所述第三直线模组用于驱动所述切割头垂直于螺旋焊管的轴向水平移动。
18.一些实施例中,所述立柱和所述承载平移台之间连接有位置调整组件,所述位置调整组件包括连接于所述承载平移台上的第一定位块以及滑动连接于所述第一定位块上且固定连接于所述立柱底部的第一滑块,所述位置调整组件带动所述立柱沿螺旋焊管径向水平移动。
19.一些实施例中,所述立柱或所述承载平移台上还设有用于遮挡切割弧光的保护罩以及连接于吸尘器的吸尘管。
20.在一种可能的实现方式中,所述承载平台上设有多个导向滚轮,所述导向滚轮间隔设于螺旋焊管周围,所述导向滚轮的滚动方向与螺旋焊管的转动方向匹配,所述导向滚轮用于支撑螺旋焊管。
21.本实现方式中,承载平移台与螺旋焊管的轴向平移速度相等,方向相同,承载平移台用来支撑螺旋焊管并与螺旋焊管同步移动,螺旋焊管相对于承载平移台只做周向旋转;切割机构用来切割螺旋焊管,其中,切割机构包括切割头,切割头朝向螺旋焊管内部且切割头的旋转中心垂直于螺旋焊管的轴向,方便切割头切割坡口,切割头通过垂直切割打孔,然后分别向两侧旋转,分别沿旋转的螺旋焊管切割一周,切割螺旋焊管的同时开出了坡口。该螺旋焊管切割坡口一体设备,与现有技术相比,将螺旋焊管的切割分离与开坡口的两道工序合并为一道工序,在切割分离的同时实现了开坡口,减少了工位占用,缩短了生产周期,提升了生产效率,且切割稳定效果好。
22.本发明实施例还提供了一种螺旋焊管切割坡口一体加工方法,使用了上述的螺旋焊管切割坡口一体设备,包括以下步骤:
23.螺旋焊管由承载平移台支撑螺旋前进,螺旋焊管相对承载平移台周向旋转;
24.调整切割头在螺旋焊管上开始穿孔作业;
25.穿孔作业完成后,通过回转机构将切割头旋转到一侧至第一预定角度;
26.螺旋焊管相对切割头旋转一周,完成第一坡口的切割;
27.通过回转机构将切割头旋转到相对的另一侧至第二预定角度;
28.螺旋焊管相对切割头旋转一周,完成第二坡口的切割;
29.调整切割头垂直于螺旋焊管的轴向,等待下一次切割。
30.在一种可能的实现方式中,还包括以下步骤:
31.通过第二直线模组调整切割头至螺旋焊管上方;
32.通过第三直线模组调整切割头朝向螺旋焊管内部。
33.本实现方式中,切割头垂直于螺旋焊管轴向在螺旋焊管上穿孔,完成后先向一个方向旋转预设角度,随后切割头切割相对旋转的螺旋焊管,螺旋焊管转动一周实现对其的切断和坡口制作,然后切割头向相反的方向旋转预设角度,切割头切割螺旋焊管,实现切断
与坡口制作,同时切割后的中间废料自动落下。通过切割头垂直螺旋焊管轴向穿孔,虽然会造成螺旋焊管穿孔的损伤,但是在切割完成后,穿孔损伤处被作为废料丢弃,且不影响坡口外表质量。与现有技术相比,该螺旋焊管切割坡口一体加工方法,将螺旋焊管的切割分离与开坡口的两道工序合并为一道工序,在切割分离的同时实现了开坡口,减少了工位占用,缩短了生产周期,提升了生产效率,且切割稳定效果好。
附图说明
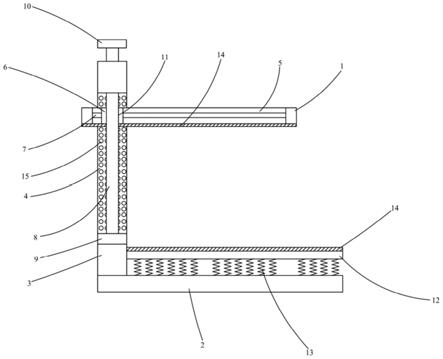
34.图1为本发明实施例提供的螺旋焊管切割坡口一体设备的主视结构示意图;
35.图2为本发明实施例提供的螺旋焊管切割坡口一体设备的俯视结构示意图;
36.图3为本发明实施例提供的螺旋焊管切割坡口一体加工设备使用切割后的螺旋焊管的示意图。
37.附图标记说明:
38.1、承载平移台;2、切割机构;3、螺旋焊管;4、固定台;5、废料承接组件;
39.11、第一直线导轨;12、第一驱动组件;13、位置调整组件;14、导向滚轮;21、切割头;22、立柱;23、回转机构;24、第二驱动组件;25、第二直线导轨;26、第三直线模组;31、第一坡口焊管;32、第二坡口焊管;33、中间废料;
40.121、第一电机;122、第一齿条;131、第一定位块;132、第一滑块。
具体实施方式
41.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.请一并参阅图1至图3,现对本发明提供的螺旋焊管切割坡口一体设备进行说明。所述螺旋焊管切割坡口一体设备,包括承载平移台1和切割机构2;承载平移台1的平移方向平行于螺旋焊管3的轴向,承载平台平移速度与螺旋焊管3的轴向移动速度相等,承载平台用于支撑螺旋焊管3移动;切割机构2包括回转机构23和设于回转机构23的转动端的切割头21,切割头21朝向螺旋焊管3内部,切割头21的旋转中心与螺旋焊管3的轴向垂直,切割头21用于在螺旋焊管3上开孔并借助回转机构23分别向两侧旋转预设角度切割坡口。
43.本实施例提供的螺旋焊管切割坡口一体设备,承载平移台1与螺旋焊管3的轴向平移速度相等,方向相同,承载平移台1用来支撑螺旋焊管3并与螺旋焊管3同步移动,螺旋焊管3相对于承载平移台1只做周向旋转;切割机构2用来切割螺旋焊管3,其中,切割机构2包括切割头21,切割头21朝向螺旋焊管3内部且切割头21的旋转中心垂直于螺旋焊管3的轴向,方便切割头21切割坡口,切割头21通过垂直切割打孔,然后分别向两侧旋转,分别沿旋转的螺旋焊管3切割一周,切割螺旋焊管3的同时开出了坡口。与现有技术相比,将螺旋焊管3的切割分离与开坡口的两道工序合并为一道工序,在切割分离的同时实现了开坡口,减少了工位占用,缩短了生产周期,提升了生产效率,且切割稳定效果好。
44.具体地,切割头21为激光切割头21,实现螺旋焊管3的切割和坡口制作。可选地,切割头21也可以是等离子割枪。
45.在一些可能的实现方式中,参见图1及图2,承载平移台1的下端设有固定台4,承载
平移台1通过第一直线模组在固定台4上平移,第一直线模组包括用于驱动承载平移台1动作的第一驱动组件12和用于支撑并引导承载平移台1往复直线移动的至少一套第一直线导轨11。
46.本实施例中,承载平移台1设于固定台4上,固定台4放置于厂房地面上,通过第一驱动组件12驱动承载平移台1动作,第一直线导轨11用于支撑和导向,通过第一驱动组件12和第一直线导轨11的作用,使承载平移台1与螺旋焊管3的轴向平移速度相同且平移方向也相同,达到承载平移台1与螺旋焊管3在平移方向上的相对静止,而使螺旋焊管3相对承载平移台1只有相对的周向旋转,使切割头21完成对螺旋焊管3的切割。在完成螺旋焊管3指定位置的两个坡口的切割后,第一驱动组件12带动承载平移台1迅速后退,通过测定后续螺旋焊管3的长度,到达下一指定位置后与螺旋焊管3的进给速度保持同步,实现对螺旋焊管3下一指定位置的切割和坡口制作。相比于切割小车在地面通过车轮控制速度,直线导轨更加稳定且摩擦力小,能量损耗小。
47.具体地,为使承载平移台1与螺旋焊管3的相对平移速度稳定相等,承载平移台1还设有用于检测承载平移台1与螺旋焊管3相对位移的位移传感器,第一驱动机构包括伺服电机,以在收到位移传感器的数据后准确快速调整电机的转动速度。
48.在一些实施例中,上述第一驱动组件12和第一直线导轨11可以采用如图2所示结构。参见图1及图2,第一驱动组件12包括第一电机121和第一齿条122;第一电机121固定设于承载平移台1上,第一电机121的动作端设有第一齿轮;第一齿条122固定设于固定台4且长度方向与螺旋焊管3的轴向平行,第一齿条122与第一齿轮啮合配合,以驱动承载平移台1动作;第一直线导轨11的滑块固定于承载平移台1的下端面,第一直线导轨11的轨道固定于固定台4的上端面,第一直线导轨11的轨道的长度方向与螺旋焊管3的轴向平行。
49.本实施例中,通过齿轮齿条组件传递第一电机121的动力,第一直线导轨11包括两个轨道和四个滑块,四个滑块分别固定于承载平移台1下端面的四角,且每两个设于同一轨道上,两个轨道长度方向与螺旋焊管3的轴向相同,分别位于固定台4的两侧。
50.具体地,第一直线导轨11的轨道两端设有限位块,用以防止承载平移台1移动过度,提升设备的安全性。
51.在一些可能的实现方式中,上述切割机构2采用如图1所示结构。参见图1及图2,切割机构2还包括立柱22和回转机构23:立柱22固定设于承载平移台1上且位于螺旋焊管一侧;回转机构23通过第二直线模组在立柱22侧面竖直平移,第二直线模组包括用于驱动回转机构23动作的第二驱动组件24和用于支撑并引导回转机构23竖直往复直线移动的至少一套第二直线导轨25;切割头21固定设于回转机构23的转动端且位于螺旋焊管3上方。
52.本实施例中,通过第二直线模组的上下调整,使切割头21靠近螺旋焊管3,方便进行切割。回转机构23为回转驱动,通常由蜗杆、回转支承、壳体、马达等部件构成。由于核心部件采用回转支承,因此可以同时承受轴向力、径向力、倾翻力矩。其形式很多,但结构组成基本大同小异。切割头21通过回转机构23控制旋转。
53.具体地,第二驱动组件24包括固定设于立柱22一侧的第一电机121,由第一电机121驱动转动的同步轮和同步带组合,同步轮位于立柱22顶端,同步带一侧与回转机构23连接,同步带另一侧连接有配重块,第一电机121为伺服电机,以准确快速控制动作的执行。
54.具体地,第二直线导轨25包括固定于回转机构23的四个滑块和固定于立柱22竖直
方向的两个轨道,每两个滑块分别套设于一个轨道上,轨道两端设有限位块,用以限制回转机构23过度升降,提升设备稳定性及安全性。
55.在一些可能的实现方式中,参见图2,回转机构23的转动端和切割头21之间还设有第三直线模组26,第三直线模组26用于驱动切割头21垂直于螺旋焊管3的轴向水平移动。
56.本实施例中,第三直线模组26使切割头21能够在垂直于螺旋焊管3的轴向水平直线往复运动。通过第二直线模组及第三直线模组26的调整,能够使切割头21位于螺旋焊管3正上方,方便切割。
57.在一些可能的实现方式中,参见图1,立柱22和承载平移台1之间连接有位置调整组件13,位置调整组件13包括连接于承载平移台1上的第一定位块131以及滑动连接于第一定位块131上且固定连接于立柱22底部的第一滑块132,位置调整组件13带动立柱22沿螺旋焊管3径向水平移动。
58.本实施例中,立柱22的横向位置,是为了使切割机构2避开螺旋焊管3。
59.具体地,第一定位块131和承载平移台1之间设有多个垫板,通过增减垫板以调整立柱22竖直,并调整切割头21旋转中心垂直于螺旋焊管3轴向且水平。
60.在一些可能的实现方式中,立柱22或承载平移台1上还设有用于遮挡切割弧光的保护罩以及连接于吸尘器的吸尘管。
61.本实施例中,保护罩实现对弧光的遮挡,挡板铰接在承载平移台1上或立柱22上并可以实现锁定,工作中,保护罩进行有效遮挡;检修或者停机时,转动保护罩至一侧位置,方便工作人员进行检修工作。吸尘管设置于切割头21的旁侧位置,随切割头21一起运动,实现了对切割过程中产生的烟气和粉尘的吸纳,有效保证了工作人员的身体健康。
62.在一些可能的实现方式中,参见图1及图2,承载平台上设有多个导向滚轮14,导向滚轮14间隔设于螺旋焊管3周围,导向滚轮14的滚动方向与螺旋焊管3的转动方向匹配,导向滚轮14用于支撑并导向螺旋焊管3。
63.本实施例中,导向滚轮14通过固定支架设于承载平移台1上,导向滚轮14间隔且在螺旋焊管3周向设有多个,用以稳定切割头21位置,使切割更加准确、更加稳定且切割效果更好。其中,导向滚轮14通过调节组件调整到螺旋焊管3轴心线的距离,保证螺旋焊管3一直处于水平状态且顺直。调节组件为丝杆结构,由丝杠和螺母,丝母固定不动,丝杠转动连接于安装滚轮的连接块中,丝杆通过电机驱动,改变电机旋转方向,进行滚轮位置的调节。
64.在一些可能的实现方式中,参见图1,承载平移台1上还设有废料承接组件5,废料承接组件5位于螺旋焊管3下方且位于切割头21正下方,废料承接组件5包括固定于承载平移台1上的底座和固定于底座的承接件,承接件上开设有与螺旋焊管3外壁匹配的弧形槽,弧形槽靠近螺旋焊管3底部,弧形槽内设有磁铁。
65.本实施例中,在两次的坡口切割完成后,废料落下,落入弧形槽内,由磁铁吸住固定,防止中间废料33落下不受控制,而对设备或人员造成伤害。
66.可选地,磁铁为电磁铁,通过控制器控制通断,在中间废料33落下时,控制电磁铁通电吸住中间废料33,在取走中间废料33时,电磁铁断电。
67.本技术实施例还提供一种螺旋焊管切割坡口一体加工方法,使用了上述的螺旋焊管3切割坡口一体设备,包括以下步骤:
68.螺旋焊管3由承载平移台1支撑螺旋前进,螺旋焊管3相对承载平移台1只做周向旋
转;调整切割头21在螺旋焊管3上开始穿孔作业;穿孔作业完成后,将切割头21旋转到一侧至第一预定角度;螺旋焊管3相对切割头21旋转一周,完成第一坡口的切割;将切割头21旋转到相对的另一侧至第二预定角度;螺旋焊管3相对切割头21旋转一周,完成第二坡口的切割;调整切割头21垂直于螺旋焊管3的轴向,等待下一次切割。
69.本实现方式中,切割头21垂直与螺旋焊管3轴向穿孔,完成后先向一个方向旋转预设角度,随后切割头21切割相对旋转的螺旋焊管3,螺旋焊管3转动一周实现对其的切断和坡口制作,然后切割头21向相反的方向旋转预设角度,切割头21切割螺旋焊管3,实现切断与坡口制作,同时切割后的中间废料33自动落下,并将螺旋焊管3分为第一坡口焊管31、中间废料33和第二坡口焊管32。通过切割头21垂直螺旋焊管3轴向穿孔,虽然会造成螺旋焊管3穿孔的损伤,但是在切割完成后,穿孔损伤出被作为废料丢弃,且不影响坡口外表质量。与现有技术相比,该螺旋焊管3切割坡口一体加工方法,将螺旋焊管3的切割分离与开坡口的两道工序合并为一道工序,在切割分离的同时实现了开坡口,减少了工位占用,缩短了生产周期,提升了生产效率,且切割稳定效果好。
70.在一些可能的实现方式中,还包括以下步骤:
71.通过第二直线模组调整切割头21至螺旋焊管3上方;通过第三直线模组26调整切割头21朝向螺旋焊管3内部。
72.本实施例中,通过第二直线模组及第三直线模组26的调整,使切割头21朝向螺旋焊管3的轴心线,并位于螺旋焊管3上方,且靠近螺旋焊管3进行切割。
73.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。