1.本发明涉及一种对使用于晶片等基板的研磨的研磨垫的表面温度进行调节的垫温度调节装置及垫温度调节方法。另外,本发明涉及一种组入有垫温度调节装置的研磨装置。
背景技术:
2.已知一种研磨装置,将晶片等基板保持在研磨头并使该基板旋转,进一步将基板按压在旋转的研磨台上的研磨垫,从而对基板的表面进行研磨。在基板的研磨过程中,向研磨垫供给研磨液(例如,浆料),通过研磨液的化学性作用与包含在研磨液中的磨粒的机械性作用使基板的表面平坦化。
3.基板的研磨速率不仅取决于基板对研磨垫的研磨负荷,还取决于研磨垫的表面温度。这是因为研磨液对基板的化学作用取决于温度。因此,在半导体器件的制造中,为了提高基板的研磨速率并进一步保持恒定,将基板研磨过程中的研磨垫的表面温度保持为最佳值是重要的。
4.对此,以往已经使用对研磨垫的表面温度进行调节的垫温度调节装置(例如,参照专利文献1、专利文献2)。一般而言,垫温度调节装置具备:热交换器,该热交换器能够与研磨垫的表面(研磨面)接触;液体供给系统,该液体供给系统向热交换器供给被温度调节了的加热液和冷却液;垫温度测定器,该垫温度测定器对研磨垫的表面温度进行测定;以及控制装置,该控制装置基于垫温度测定器的测定值来控制液体供给系统。控制装置使研磨垫的表面温度达到规定的目标温度,随后,基于由垫温度测定器测定出的垫表面温度来控制加热液和冷却液的流量,以维持在该目标温度。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2017
‑
148933号公报
8.专利文献2:日本特开2018
‑
027582号公报
9.发明所要解决的技术问题
10.然而,由于垫温度调节装置的热交换器在基板的研磨过程中必然与研磨液接触,因此在热交换器附着有包含在研磨液的磨粒和研磨垫的磨料粉等的污垢。当污垢在基板的研磨过程中从热交换器掉落时,基板会被污染,并且会在基板产生划痕等缺陷。
11.而且,以往的垫温度调节装置的控制方法同时控制相反的两个参数,即,加热液的流量和冷却液的流量,因此是较为复杂的控制方法。因此,希望更为简单地控制研磨垫的表面温度,从而提高该研磨垫的表面温度的控制响应性。
技术实现要素:
12.因此,本发明的目的在于提供一种使研磨垫的表面温度的控制响应性提高,并且能够不在基板产生划痕等缺陷和污染就调节该研磨垫的表面温度的垫温度调节装置和垫
温度调节方法。而且,本发明的目的在于提供一种组入有这样的垫温度调节装置的研磨装置。
13.用于解决技术问题的技术手段
14.在一方式中,提供一种垫温度调节装置,将研磨垫的表面温度调节为规定的目标温度,该垫温度调节装置具备:热交换器,该热交换器配置于所述研磨垫的上方,并且被维持在规定的温度;垫温度测定器,该垫温度测定器对所述研磨垫的表面温度进行测定;至少一个距离传感器,该距离传感器对所述研磨垫与所述热交换器之间的间隔距离进行测定;上下移动机构,该上下移动机构使所述热交换器相对于所述研磨垫进行上下移动;以及控制装置,该控制装置基于所述垫温度测定器的测定值来控制所述上下移动机构的动作。
15.在一方式中,所述热交换器包括形成于该热交换器的内部的加热流路,被维持在规定的温度的加热液以规定的流量被供给至所述加热流路。
16.在一方式中,进一步具备冷却机构,该冷却机构对所述研磨垫的表面进行冷却,当在所述上下移动机构达到所述热交换器的移动上限后,所述目标温度比所述垫温度测定器的测定值低时,所述控制装置使所述冷却机构工作。
17.在一方式中,所述冷却机构形成于所述热交换器的内部,并且包括被供给冷却流体的冷却流路,所述控制装置基于所述垫温度测定器的测定值来控制所述冷却流体的流量。
18.在一方式中,所述控制装置具备:存储部,该存储部储存有通过使用了训练数据的机器学习而构建的学习完成模型,该训练数据至少包括所述热交换器与所述研磨垫之间的距离和与该距离对应的所述研磨垫的表面的温度的组合;以及处理装置,该处理装置将至少包括所述目标温度和所述垫温度测定器的测定值的温度控制参数输入所述学习完成模型,并且执行用于输出所述上下移动机构的操作量的运算。
19.在一方式中,提供一种垫温度调节方法,将研磨垫的表面温度调节至规定的目标温度,对研磨垫的表面温度进行测定,使配置在所述研磨垫的上方且被维持在规定的温度的热交换器根据所述研磨垫的表面温度而相对于所述研磨垫进行上下移动,从而将所述研磨垫的表面温度调节至所述目标温度。
20.在一方式中,为了将所述热交换器维持在所述规定的温度,以规定的流量向形成于所述热交换器的内部的加热流路供给被维持在规定的温度的加热液。
21.在一方式中,当在所述热交换器到达移动上限后,所述目标温度比对所述研磨垫的表面温度进行测定的垫温度测定器的测定值低时,使用冷却机构来冷却所述研磨垫的表面。
22.在一方式中,冷却所述研磨垫的表面的工序是基于所述垫温度测定器的测定值来控制在形成于所述热交换器的内部的冷却流路流动的冷却流体的流量的工序。
23.在一方式中,通过使用了训练数据的机器学习来构建学习完成模型,该训练数据至少包括所述热交换器与所述研磨垫之间的距离和与该距离对应的所述研磨垫的表面的温度的组合,将至少包括所述目标温度和所述垫温度测定器的测定值的温度控制参数输入所述学习完成模型,并且使该学习完成模型输出所述上下移动机构的操作量。
24.在一方式中,提供一种研磨装置,具备:研磨台,该研磨台对研磨垫进行支承;研磨头,该研磨头将基板按压于所述研磨垫;垫温度测定器,该垫温度测定器对所述研磨垫的表
面温度进行测定;以及上述垫温度调节装置。
25.发明的效果
26.根据本发明,热交换器配置于研磨垫的上方,包含在研磨液的磨粒和研磨垫的磨料粉等污垢不附着于热交换器。其结果是,防止在基板产生划痕等缺陷和污染。而且,控制装置仅控制热交换器相对于研磨垫的距离,以使研磨垫的表面温度与目标温度一致。因此,能够以简单的控制来提高研磨垫的表面温度的控制响应性。
附图说明
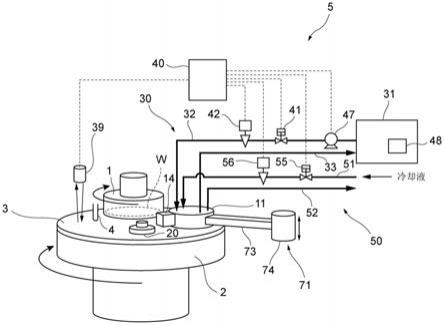
27.图1是表示一实施方式的研磨装置的示意图。
28.图2是表示一实施方式的热交换器的水平剖视图。
29.图3是表示通过热交换器来调节垫表面温度的情况的示意图。
30.图4是表示热交换器与研磨垫之间的距离和垫表面温度之间的关系的一例的图表。
31.图5是表示使冷却液供给系统工作而调节垫表面温度的情况的示意图。
32.图6是表示通过其他实施方式的热交换器来调节垫表面温度的情况的示意图。
33.图7是进一步表示由其他的实施方式的热交换器来调节垫表面温度的情况的示意图。
34.图8是表示执行机器学习的控制装置的一例的示意图,该机器学习构建对上下移动机构的适当的操作量进行预测的学习完成模型。
35.图9是表示神经网络的结构的一例的示意图。
36.图10的(a)和图10的(b)是用于说明作为递归神经网络的一例的简单递归型网络的展开图。
37.图11是表示具有用于获取研磨垫的轮廓的垫高度测定器的研磨装置的一例的示意图。
38.符号说明
[0039]1ꢀꢀꢀ
研磨头
[0040]2ꢀꢀꢀ
研磨台
[0041]3ꢀꢀꢀ
研磨垫
[0042]4ꢀꢀꢀ
研磨液供给喷嘴
[0043]
11
ꢀꢀ
热交换器
[0044]
14
ꢀꢀ
距离传感器
[0045]
17
ꢀꢀ
气体喷射喷嘴(冷却机构)
[0046]
18
ꢀꢀ
加热器
[0047]
19
ꢀꢀ
加热灯
[0048]
23
ꢀꢀ
冷却风扇(冷却机构)
[0049]
30
ꢀꢀ
加热液供给机构
[0050]
39
ꢀꢀ
垫温度测定器
[0051]
40
ꢀꢀ
控制装置
[0052]
40a 存储装置
[0053]
40b 处理装置
[0054]
50
ꢀꢀ
冷却液供给机构
[0055]
71
ꢀꢀ
上下移动机构
[0056]
74
ꢀꢀ
致动器
具体实施方式
[0057]
以下,参照附图对本发明的实施方式进行说明。
[0058]
图1是表示一实施方式的研磨装置的示意图。如图1所示,研磨装置具备:研磨头1,该研磨头1对作为基板的一例的晶片w进行保持并使晶片w旋转;研磨台2,该研磨台2对研磨垫3进行支承;研磨液供给喷嘴4,该研磨液供给喷嘴4向研磨垫3的表面供给研磨液(例如,浆料);以及垫温度调节装置5,该垫温度调节装置5对研磨垫3的表面温度进行调节。研磨垫3的表面(上表面)构成对晶片w进行研磨的研磨面。
[0059]
研磨头1能够在铅锤方向上移动,并且能够以研磨头1的轴心作为中心而在箭头所示的方向上进行旋转。晶片w通过真空吸附等而被保持在研磨头1的下表面。在研磨台2连结有电机(未图示),并且能够在箭头所示的方向上进行旋转。如图1所示,研磨头1和研磨台2在相同的方向上旋转。研磨垫3粘贴在研磨台2的上表面。
[0060]
图1所示的研磨装置进一步具备对研磨台2上的研磨垫3进行修整的修整器20。修整器20构成为在研磨垫3的表面上在研磨垫3的半径方向上摆动。修整器20的下表面构成由金刚石粒子等大量磨粒构成的修整面。修整器20在研磨垫3的研磨面上摆动并旋转,通过轻微磨削研磨垫3而对研磨垫3的表面进行修整。
[0061]
晶片w的研磨如以下方式进行。被研磨的晶片w通过研磨头1而被保持,并且进一步通过研磨头1进行旋转。另一方面,研磨垫3与研磨台2一同旋转。在该状态下,从研磨液供给喷嘴4向研磨垫3的表面供给研磨液,并且晶片w的表面通过研磨头1而被按压至研磨垫3的表面(即,研磨面)。晶片w的表面通过在研磨液的存在下与研磨垫3滑动接触而被研磨。晶片w的表面通过研磨液的化学性作用和包含在研磨液中的磨粒的机械性作用而被平坦化。
[0062]
垫温度调节装置5具备:热交换器11,该热交换器11配置于研磨垫3的上方;垫温度测定器39,该垫温度测定器39对研磨垫3的表面温度(以下,有称为垫表面温度的情况)进行测定;加热液供给系统30,该加热液供给系统30以规定的流量向热交换器11供给被调节为规定的温度的加热液;上下移动机构71,该上下移动机构71使热交换器11相对于研磨垫3进行上下移动;以及控制装置40,该控制装置40基于垫温度测定器39的测定值来控制上下移动机构71的动作。在本实施方式中,控制装置40构成为对包括垫温度调节装置5在内的研磨装置整体的动作进行控制。
[0063]
图1所示的加热液控制系统30具备:加热液供给箱31,该加热液供给箱31作为贮存被调节至规定的温度的加热液的加热液供给源;以及加热液供给管32和加热液返回管33,该加热液供给管32和加热液返回管33将加热液供给箱31与热交换器11连结。加热液供给管32和加热液返回管33的一侧的端部与加热液供给箱31连结,另一侧的端部与热交换器11连接。
[0064]
被温度调节了的加热液从加热液供给箱31通过加热液供给管32而向热交换器11供给,并且在热交换器11内流动,然后从热交换器11通过加热液返回管33而返回至加热液
供给箱31。这样,加热液在加热液供给箱31与热交换器11之间循环。在本实施方式中,在加热液供给箱31配置有加热源(例如,加热器)48。通过该加热源48,被贮存在加热液供给箱31的加热液被加热至规定的温度(设定温度)。
[0065]
在加热液供给管32安装有第一开闭阀(加热液供给阀)41和第一流量控制阀(加热液流量控制阀)42。第一流量控制阀42配置于热交换器11与第一开闭阀41之间。第一开闭阀41是不具有流量调节功能的阀,与之相对,第一流量控制阀42是具有流量调节功能的阀。第一流量控制阀42与控制装置40连接,并且将向热交换器11供给的加热液的流量调节至规定的流量(设定流量)。
[0066]
使用温水作为向热交换器11供给的加热液。温水由加热液供给箱31的加热源48加热至例如大约80℃的设定温度。在将加热液的温度设定为更高温的情况下,也可以使用硅油作为加热液。在使用硅油作为加热液的情况下,硅油由加热液供给箱31的加热源48加热至100℃以上(例如,大约120℃)的设定温度。
[0067]
这样,由于被调节至规定的温度且以规定的流量流动的加热液向热交换器11供给,因此热交换器11的温度被维持在恒定的温度。该热交换器11配置于研磨垫3的上方,研磨垫3的表面通过来自热交换器11的辐射热而被加热。
[0068]
虽然在后文将进行详细描述,但是如图1所示,垫温度调节装置5也可以具备向热交换器11供给冷却液的冷却液供给系统50。冷却液供给系统50作为对研磨垫3的表面进行冷却的冷却机构而发挥功能。在以下的说明中,虽然对包括冷却液供给系统50在内的垫温度调节装置5的实施方式进行说明,但是垫温度调节装置5也可以省略冷却液供给系统50。
[0069]
冷却液供给系统50具备与热交换器11连接的冷却液供给管51和冷却液排出管52。冷却液供给管51与冷却液供给源(例如,冷水供给源)连接,该冷却液供给源设置在设有研磨装置的工厂。冷却液通过冷却液供给管51向热交换器11供给,并且在热交换器11内流动,然后从热交换器11通过冷却液排出管52而排出。在一实施方式中,也可以使流过热交换器11内的冷却液通过冷却液排出管52而返回至冷却液供给源。
[0070]
在冷却液供给管51安装有第二开闭阀(冷却液供给阀)55和第二流量控制阀(冷却液流量控制阀)56。第二流量控制阀56配置于热交换器11与第二开闭阀55之间。第二开闭阀55是不具有流量调节功能的阀,与之相对,第二流量控制阀56是具有流量调节功能的阀。控制装置40与第二流量控制阀56连接,并且能够调节向热交换器11供给的冷却液的流量。
[0071]
使用冷水或者硅油作为向热交换器11供给的冷却液。在使用硅油作为冷却液的情况下,通过使作为冷却液供给源的冷机与冷却液供给管51连接,并且将硅油冷却至0℃以下,能够迅速地冷却研磨垫3。能够使用纯水作为冷水。为了冷却纯水而生成冷水也可以使用冷机作为冷却液供给源。在该情况下,也可以使流过热交换器11内的冷水通过冷却液排出管52而返回至冷机。
[0072]
加热液供给系统30的加热液供给管32和冷却液供给系统50的冷却液供给管51是完全独立的配管。因此,加热液和冷却液能够不混合地同时向热交换器11供给。加热液返回管33和冷却液排出管52也是完全独立的配管。因此,加热液不与冷却液混合地返回至加热液供给箱31,冷却液不与加热液混合地排出,或者返回至冷却液供给源。
[0073]
图2是表示一实施方式的热交换器11的水平剖视图。图2所示的热交换器11具有形成于热交换器11的内部的加热流路61和冷却流路62。加热流路61和冷却流路62彼此相邻
(彼此并排)地延伸,并且呈螺旋状延伸。加热流路61和冷却流路62完全分离,在热交换器11内加热液和冷却液不会混合。
[0074]
加热液供给管32与加热流路61的入口61a连接,加热液返回管33与加热流路61的出口61b连接。冷却液供给管51与冷却流路62的入口62a连接,冷却液排出管52与冷却流路62的出口62b连接。加热流路61和冷却流路62各自基本上由曲率恒定的多个圆弧流路64和将这些圆弧流路64连结的多个倾斜流路65构成。相邻的两个圆弧流路64由各倾斜流路65连结。根据这样的结构,能够将加热流路61和冷却流路62各自的最外周部配置于垫接触部件11的最外周部。即,由垫接触部件11的下表面构成的垫接触面的大致整体位于加热流路61和冷却流路62的下方,加热液和冷却液能够对研磨垫3的表面迅速地加热和冷却。
[0075]
返回至图1,垫温度调节装置5的垫温度测定器39配置于研磨垫3的表面的上方,以非接触的方式来测定研磨垫3的表面温度。垫温度测定器39与控制装置40连接,并且向控制装置40发送其测定值。
[0076]
垫温度测定器39可以是测定研磨垫3的表面温度的红外线放射温度计或者热电偶温度计,也可以是获取沿着研磨垫3的径向的研磨垫3的温度分布(温度轮廓)的温度分布测定器。列举热成像仪、热电堆以及红外摄像装置作为温度分布测定器的例子。在垫温度测定器39为温度分布测定器的情况下,垫温度测定器39构成为测定包括研磨垫3的中心和外周缘在内的区域,即测定沿着该研磨垫3的半径方向延伸的区域的研磨垫3的表面温度的分布。在本说明书中,温度分布(温度轮廓)表示垫表面温度与晶片w上的半径方向的位置的关系。
[0077]
垫温度调节装置5的上下移动机构71是在热交换器11不与研磨垫3的表面接触的范围内,使热交换器11相对于研磨垫3在上下方向上移动的装置。上下移动机构71至少具备致动器74,该致动器74能够使热交换器11在上下方向上移动。
[0078]
图1所示的上下移动机构71具备与热交换器11连结的支承部件73和经由支承部件73使热交换器11上下移动的致动器74。致动器74的结构只要能够使热交换器11在上下方向上移动则可以是任意的。例如,致动器74可以是具备活塞的活塞缸装置,该活塞使热交换器11经由支承部件73而上下移动,或者该致动器74也可以是使热交换器11经由支承部件73而上下移动的电机(例如,伺服电机、步进电机)。在一实施方式中,致动器74也可以是利用压电元件的压电效应来使热交换器11经由支承部件73而上下移动的压电致动器。
[0079]
上下移动机构71与控制装置40连接。控制装置40基于垫温度测定器39的测定值来控制上下移动机构71的动作(即,致动器74的操作量),由此,控制热交换器11相对于研磨垫3的上下方向的位置。如上所述,热交换器11被加热至规定的温度,并且被维持在该规定的温度。因此,当使热交换器11接近研磨垫3时,能够使垫表面温度上升。当使热交换器11从研磨垫3离开时,垫表面温度降低。
[0080]
图3是表示由热交换器11调节垫表面温度的情况的示意图。图4是表示热交换器11与研磨垫3之间的距离和垫表面温度之间的关系的一例的图表。在以下的说明中,有将热交换器11与研磨垫3之间的距离称为“间隔距离”的情况。在图4中,纵轴表示研磨垫3的表面的温度(即,垫表面温度),横轴表示间隔距离。图4所示的图表表示在使被维持在规定的温度的热交换器11相对于研磨垫3移动时变化的垫表面温度的一例。
[0081]
控制装置40预先存储间隔距离与垫表面温度之间的关系。例如,控制装置40预先
存储图4所示的图表或者通过该图标得到的间隔距离与垫表面温度之间的关系式。在一实施方式中,控制装置40也可以预先存储通过图4所示的图表得到的间隔距离与垫表面温度的数据表。图4所示的图表可以通过实验得到,也可以通过模拟得到。
[0082]
垫温度调节装置5具有至少一个距离传感器14,该距离传感器14能够测定热交换器11与研磨垫3的表面之间的距离。在图1及图3所示的实施方式中,距离传感器14安装于热交换器11的外表面。距离传感器14也与控制装置40连接,并且将其测定值发送至控制装置40。
[0083]
如上所述,控制装置40使用上下移动机构71来控制热交换器11相对于研磨垫3的上下方向的位置,以使垫温度测定器39的测定值与规定的目标温度一致。以下,进一步详细说明由垫温度调节装置5进行的垫表面温度的调节方法。
[0084]
首先,控制装置40使热交换器11移动至到达热交换器11与研磨垫3之间的距离与规定的目标温度t1对应的间隔距离x1(参照图4)。具体而言,控制装置40基于距离传感器14的测定值来算出热交换器11与研磨垫3之间的距离到达间隔距离为止的移动量,从而决定与得到的移动量对应的上下移动机构71的致动器74的操作量。控制装置40基于致动器74的操作量向致动器74发送指令而使热交换器11移动。
[0085]
接着,如果垫温度测定器39的测定值比规定的目标温度t1高(低),控制装置40向上下移动机构71的致动器74发送指令,以使间隔距离x变大(小)。在该情况下,基于目标温度t1与垫温度测定器39的测定值的差量来决定热交换器11的移动量。具体而言,控制装置40算出目标温度t1与垫温度测定器39的测定值的差量,并且通过图4所示的图表或者由该图表得到的间隔距离与垫表面温度之间的关系式(或者数据表)来决定使该差量为0的热交换器11的移动量。控制装置40在每次变更热交换器11相对于研磨垫3的距离时,存储间隔距离x和与该间隔距离x对应的垫表面温度(即,垫温度测定器39的测定值)的组合。
[0086]
这样,为了将垫表面温度调节为目标温度,控制装置40变更被维持在规定的温度的热交换器11相对于研磨垫3的间隔距离x。热交换器11始终位于研磨垫3的上方,控制装置40不使热交换器11与研磨垫3接触。因此,由于包含在研磨液的磨粒和研磨垫3的磨料粉等污垢不会附着于热交换器11,因此防止在晶片(基板)w产生划痕等缺陷和污染。而且,为了将研磨垫3的表面温度调节为目标温度,控制装置40仅控制热交换器11相对于研磨垫3的距离。因此,能够以简单的控制来提高研磨垫3的表面温度的控制响应性。
[0087]
上下移动机构71必然具有热交换器11的移动量的上限和下限。热交换器11的移动量的下限(参照图4的间隔距离xl)是能够使热交换器11接近研磨垫3的表面的界限值,该下限是预先被决定的。控制装置40预先存储与热交换器11的移动量的下限对应的致动器74的操作量,并且构成为不向致动器74发送超过该操作量的指令。
[0088]
热交换器11的移动量的上限(参照图4的间隔距离xh)例如是上下移动机构71的物理性或者机械性的动作界限值。在热交换器11的正上方存在研磨装置的其他结构要素的情况下,热交换器11的移动量的上限被预先设定为热交换器11不与其他的结构要素接触。这样,使热交换器11从研磨垫3的表面远离存在界限。因此,如图4所示,当规定的目标温度被设定为热交换器11与上下移动机构71的移动上限(即,图4所示的间隔距离xh)对应的垫表面温度tc以下的目标温度t2时,通过被维持在规定的温度的热交换器11,不能将研磨垫3的表面的温度降低至目标温度t2。
[0089]
在该情况下,控制装置40使上述的冷却液供给系统(冷却机构)50工作。图5是表示使冷却液供给系统50工作而调节垫表面温度的情况的示意图。如图5所示,通过冷却液供系统50(参照图1)向热交换器11供给冷却液。在该情况下,虽然被调节至规定的温度的加热液以规定的流量向热交换器11持续地供给,但是通过由冷却液供给系统50供给的冷却液,热交换器11的温度降低。其结果是,能够使研磨垫3的表面的温度降低至垫表面温度tc以下的目标温度t2。
[0090]
控制装置40基于垫温度测定器39的测定值来调节向热交换器11供给的冷却液的流量。更具体而言,控制装置40控制第二流量控制阀56(参照图1)的开度来调节向热交换器11供给的冷却液的流量,以使垫温度测定器39的测定值与目标温度t2一致。
[0091]
在规定的目标温度被设定为与上下移动机构71的移动上限对应的垫表面温度tc以下的目标温度t2的情况下,控制装置40不控制上下移动机构71的操作量(即,热交换器11的上下方向的位置),而控制冷却液的流量。在该情况下,控制装置40为了将垫表面温度调节为规定的目标温度所控制的参数也仅是冷却液的流量。因此,能够以简单的控制来提高研磨垫3的表面温度的控制响应性。
[0092]
而且,冷却液仅在规定的目标温度被设定为与上下移动机构71的移动上限对应的垫表面温度tc以下的温度的情况下被使用。因此,本实施方式的垫温度调节装置5与始终将冷却液向热交换器供给的以往的垫温度调节装置相比,能够削减冷却液的使用量。其结果是,由于用于制造冷却液的成本降低,因此能够降低垫温度调节装置5的运行成本。
[0093]
图6是表示通过其他实施方式的热交换器11来调节垫表面温度的情况的示意图。并未特意说明的实施方式的结构与上述的实施方式相同,因此省略其重复的说明。
[0094]
图6所示的热交换器11代替加热液供给系统30而具有加热器18。加热器18与控制装置40连接。控制装置40将向加热器18供给的电流及电压控制为恒定。由此,热交换器11被加热至规定的温度,并且被维持在该规定的温度。
[0095]
在图6所示的实施方式中,代替冷却液供给系统50而具有向研磨垫3的表面喷射气体的气体喷射喷嘴17。气体喷射喷嘴17作为冷却研磨垫3的表面的冷却机构而发挥功能。
[0096]
在本实施方式中,垫温度调节装置5也基于垫温度测定器39的测定值,通过使被维持在规定的温度的热交换器11相对于研磨垫3进行上下移动而将垫表面温度调节至目标温度。在规定的目标温度被设定为与上下移动机构71的移动上限对应的垫表面温度tc以下的目标温度t2的情况下,启动气体喷射喷嘴(冷却机构)17。控制装置40基于垫温度测定器39的测定值来控制从气体喷射喷嘴17喷射的气体的流量。
[0097]
图7是表示进一步通过其他实施方式的热交换器11来调节垫表面温度的情况的示意图。并未特意说明的实施方式的结构与上述的实施方式相同,因此省略其重复的说明。
[0098]
图7所示的热交换器11代替加热液供给系统30而具有加热灯19。加热灯19与控制装置40连接,控制装置40将向加热灯19供给的电流及电压控制为恒定。由此,热交换器11被加热至规定的温度,并且被维持在该规定的温度。
[0099]
在图7所示的实施方式中,代替冷却液供给系统50而具有产生朝向研磨垫3的表面的气流的冷却风扇23。冷却风扇23作为冷却研磨垫3的表面的冷却机构而发挥功能。
[0100]
在本实施方式中,垫温度调节装置5也基于垫温度测定器39的测定值,通过使被维持在规定的温度的热交换器11相对于研磨垫3进行上下移动而将垫表面温度调节至目标温
度。在规定的目标温度被设定为与上下移动机构71的移动上限对应的垫表面温度tc以下的目标温度t2的情况下,启动冷却风扇(冷却机构)23。控制装置40基于垫温度测定器39的测定值来控制冷却风扇23的旋转速度。
[0101]
在一实施方式中,也可以是,图6所示的垫温度调节装置5代替气体喷射喷嘴17而具有冷却风扇23。另外,也可以是,图7所示的垫温度调节装置5代替冷却风扇23而具有气体喷射喷嘴17。
[0102]
只要能够以非接触的方式测定热交换器11与研磨垫3的表面之间的距离,能够使用任意的传感器作为距离传感器14。列举激光式传感器、超声波传感器、涡电流式传感器或者静电容量传感器等作为距离传感器14的例子。在图1及图3所示的实施方式中,虽然仅一个距离传感器14安装于热交换器11,但是垫温度调节装置5也可以具有沿着热交换器11的外周面等间隔地配置的多个(例如,四个)距离传感器14。在垫温度调节装置5具有多个距离传感器14的情况下,控制装置40也可以使用多个距离传感器14的测定值的平均值作为间隔距离,也可以使用多个距离传感器14的测定值的最大值(或最小值)作为间隔距离。
[0103]
垫温度调节装置5的控制装置40也可以使用通过进行机器学习而构建的学习完成模型来预测或决定用于使垫表面温度迅速地收敛至规定的目标温度,并且维持在规定的目标温度的上下移动机构71的适当的操作量(或者,热交换器11与研磨垫3之间的适当的间隔距离)。
[0104]
通过作为人工智能(ai:artificial intelligence)的算法的学习算法来执行机器学习,并且通过机器学习来构建预测上下移动机构71的适当的操作量的学习完成模型。构建学习完成模型的学习算法并无特别的限定。例如,能够采用“有监督学习”、“无监督学习”、“强化学习”、“神经网络”等公知的学习算法作为用于学习上下移动机构71的适当的操作量的学习算法。
[0105]
图8是表示能够执行用于构建学习完成模型的机器学习的控制装置40的一例的示意图。该控制装置40具备:存储装置40a,该存储装置40a储存有程序、数据以及学习完成模型等;cpu(中央处理装置)或者gpu(图形处理单元)等处理装置40b,该处理装置40b根据储存于存储装置40a的程序来进行运算;以及机器学习器300,该机器学习器300与处理装置40b连结,并且构建预测上下移动机构71的适当的操作量的学习完成模型。在一实施方式中,也可以与控制装置40分开地设置构建预测上下移动机构71的适当的操作量的学习完成模型的机器学习器300。
[0106]
图8所示的机器学习器300是能够学习上下移动机构71的适当的操作量的机器学习器的一例。该机器学习器300具备状态观测部301、数据获取部302以及学习部303。
[0107]
状态观测部301观测作为机器学习的输入值的状态变量。状态变量是与垫表面温度的控制有关的温度控制参数的统称。在本实施方式中,状态变量至少包括垫温度测定器39获取到的垫表面温度的测定值和垫温度测定器39获取到垫表面温度时的距离传感器14的测定值(即,间隔距离)。
[0108]
数据获取部302从判定部310获取移动量数据。移动量数据是构建预测上下移动机构71的适当的操作量的学习完成模型时使用的数据,并且是根据公知的测量方法来测量使被维持在某一温度的热交换器11与研磨垫3之间的间隔距离变化时的变化量和与该变化量对应的研磨垫3的表面的温度的变化量的关系的数据。移动量数据与输入至状态观测部301
的状态变量相关(相关联)。
[0109]
由机器学习器300执行的机器学习的一例如以下这样进行。首先,状态观测部301获取至少包括间隔距离和与该间隔距离对应的研磨垫3的表面的温度的状态变量,数据获取部302获取与状态观测部301获取到的状态变量相关的移动量数据。学习部303基于作为从状态观测部301获取到的状态变量和从数据获取部302获取到的移动量数据的组合的训练数据组来学习上下移动机构71的适当的操作量。由机器学习器300执行的机器学习反复执行至机器学习器300输出上下移动机构71的适当的操作量。
[0110]
在一实施方式中,机器学习器300的学习部303执行的机器学习也可以是使用了神经网络的机器学习,尤其是,也可以为深度学习。深度学习是以隐藏层(也称为中间层)被多层化的神经网络为基础的机器学习法。在本说明书中,将使用了由输入层、两层以上的隐藏层以及输出层构成的神经网络的机器学习称为深度学习。
[0111]
图9是表示神经网络的结构的一例的示意图。图9所示的神经网络具有输入层350、多个隐藏层351以及输出层352。神经网络基于由状态观测部301获取到的状态变量和与该状态变量相关的由数据获取部302获取到的移动量数据的大量的组合而构成的训练数据组来学习上下移动机构71的适当的操作量。即,神经网络学习状态变量与上下移动机构71的操作量的关系。这样的机器学习被称为所谓的“有监督学习”。在有监督学习中,通过将状态变量和与该状态变量相关的移动量数据(标记)的组合大量输入神经网络而归纳性地学习它们的关联性。
[0112]
在一实施方式中,神经网络也可以通过所谓的“无监督学习”来学习上下移动机构71的适当的操作量。无监督学习例如是仅将状态变量大量地输入至神经网络,并学习该状态变量如何分布。并且,在无监督学习中,即使不将与状态变量对应的监督输出数据(移动量数据)输入至神经网络,也对被输入的状态变量进行压缩、分类、整形等,从而构建用于输出上下移动机构71的适当的操作量的学习完成模型。即,在无监督学习中,神经网络将被大量地输入的状态变量分类为具有某种相似特征的小组。并且,神经网络对于被分类的多个小组设置用于输出上下移动机构71的适当的操作量的规定的基准,通过使它们的关系最优化来构建学习完成模型,由此输出上下移动机构71的适当的操作量。
[0113]
而且,在一实施方式中,为了将状态变量随时间的变化反映到学习完成模型中,由学习部303执行的机器学习也可以使用所谓的“递归神经网络(rnn:recurrent neural network)”。递归神经网络不仅利用当前时刻的状态变量,还利用到当前为止被输入到输入层350的状态变量。在递归神经网络中,通过将沿着时间轴的状态变量的变化展开并考虑,能够构建基于到当前为止被输入了的状态变量的迁移来推测上下移动机构71的适当的操作量的学习完成模型。
[0114]
图10的(a)和图10的(b)是用于说明作为递归神经网络的一例的递归型神经网络(elman网络:elman network)的展开图。更具体而言,图10的(a)是表示elman网络的时间轴展开的示意图,图10的(b)是表示误差逆传播法(也称为“反向传播”)的反向传播经过时间的示意图。
[0115]
在图10的(a)和图10的(b)所示的elman网络中,与通常的神经网络不同,误差以追溯时间的方式传播(参照图10的(b))。通过将这样的递归神经网络结构应用于学习部303所执行的机器学习的神经网络,能够构建基于到当前为止输入的状态变量的迁移而输出上下
移动机构71的适当的操作量的学习完成模型。
[0116]
这样被构建的学习完成模型储存于控制装置40的存储装置40a(参照图8)。控制装置40按照电储存于存储装置40a的程序进行动作。即,控制装置40的处理装置40b将至少包含从垫温度测定器39和距离传感器14向控制装置40发送的间隔距离和与该间隔距离对应的垫表面温度在内的状态变量输入到学习完成模型的输入层350,并且通过被输入的状态变量(以及状态变量随时间的变化量)来预测用于使垫表面温度达到规定的目标温度的上下移动机构71的操作量,并执行用于从输出层352输出该预测的操作量的运算。控制装置40基于从输出层352输出的上下移动机构71的操作量而使热交换器11在上下方向上移动。通过这样的控制,能够更迅速且准确地将垫表面温度调节至目标温度。
[0117]
在从输出层352输出的上下移动机构71的操作量被判断为与正常数据同等的情况下,控制装置40也可以将该上下移动机构71的操作量作为追加的监督数据而存储于判定部310。在该情况下,机器学习器300通过基于监督数据和追加的监督数据的机器学习来更新学习完成模型。由此,能够提高从学习完成模型输出的上下移动机构71的操作量的精度。
[0118]
在一实施方式中,也可以选择以下所示的状态变量中的几个状态变量作为进一步输入至状态观测部301的状态变量。或者,也可以将以下所示的所有的状态变量输入至状态观测部301。
[0119]
(1)研磨垫3的种类
[0120]
(2)研磨垫3的厚度
[0121]
(3)研磨垫3的磨损量
[0122]
(4)研磨头1的旋转速度
[0123]
(5)研磨头1(即,晶片w)对研磨垫3的按压负荷
[0124]
(6)研磨台2的旋转速度
[0125]
(7)包含在研磨液(浆料)的磨粒的种类
[0126]
(8)研磨液的流量
[0127]
(9)研磨液的温度
[0128]
(10)热交换器11的设定温度
[0129]
(11)研磨装置内的氛围气体温度
[0130]
这些状态变量(1)至(10)与垫表面温度的变化相关。具体而言,当上述状态变量(1)至(10)中的任一项改变时,晶片w与研磨垫3之间产生的摩擦热的量变化。因此,在上述状态变量(1)至(10)的任一项不同的条件下,即使热交换器11以相同的间隔距离对研磨垫3的表面进行加热,达到的垫表面温度也不同。在研磨装置内的氛围气体温度不同的条件下,也会产生同样的现象。
[0131]
因此,通过进一步将这些状态变量(1)至(11)中的至少一个输入到状态观测部301并利用于构建学习完成模型的机器学习,学习完成模型能够输出更为准确的上下移动机构71的操作量。
[0132]
接着,参照图11对测定研磨垫3的磨损量的方法进行说明。图11是表示具有用于获取研磨垫3的轮廓的垫高度测定器的研磨装置的一例的示意图。
[0133]
图11所示的研磨装置进一步具备:修整器装置152,设置该修整器装置152是为了使随着晶片w的反复研磨而劣化的研磨垫3的表面再生;垫高度测定器173,该垫高度测定器
173安装于该修整器装置152。如以下说明的那样,垫高度测定器173测定研磨垫3的表面的高度,控制装置40基于获得的研磨垫3的表面的高度来算出研磨垫3的磨损量。
[0134]
图11所示的修整装置152具备:修整研磨垫3的表面的上述修整器20(参见图1);连结有修整器20的修整器轴155;设置于修整器轴155的上端的气缸154;以及旋转自如地支承修整器轴155的修整器臂157。修整器20的下表面构成修整面,该修整面由磨粒(例如,金刚石粒子)构成。气缸154经由未图示的支承机构而固定于修整器臂157。
[0135]
修整器臂157由未图示的电机驱动,并且构成为以修整器回旋轴158为中心而回旋。修整器20通过设置于修整器臂157内的未图示的旋转机构与修整器轴155一同被旋转驱动。气缸154作为经由修整器轴155以规定的负荷(按压力)将修整器20按压于研磨垫3的表面的致动器而发挥功能。当修整器臂157以修整器回旋轴158为中心而回旋时,修整器20在研磨垫3的表面上在研磨台2的大致半径方向上摆动。
[0136]
在研磨垫3的修整过程中,修整器20以修整器轴155为中心而旋转,并且从液体供给喷嘴174向研磨垫3上供给修整液。在该状态下,将修整器20按压于研磨垫3,该修整面(即修整器20的下表面)与研磨垫3的表面滑动接触。而且,使修整器臂157以修整器回旋轴158为中心而回旋,从而使修整器20在研磨垫3的半径方向上摆动。这样,研磨垫3被修整器20磨削,研磨垫3的表面被修整(再生)。
[0137]
图11所示的垫高度测定仪173具有用于测定研磨垫3的表面的高度的垫高度传感器175和与垫高度传感器175相对地配置的传感器目标物176。垫高度传感器175与控制装置40连接。
[0138]
垫高度传感器175固定于修整器臂157,并且传感器目标物176固定于修整器轴155。传感器目标物176与修整器轴155和修整器20一体地进行上下移动。另一方面,垫高度传感器175的上下方向的位置是固定的。垫高度传感器175是位移传感器,能够通过测定传感器目标物176的位移来间接地测定研磨垫3的表面的高度(研磨垫3的厚度)。由于传感器目标物176与修整器20一体地进行上下移动,因此垫高度传感器175能够在研磨垫3的修整过程中测定研磨垫3的表面的高度。能够使用线性刻度式传感器、激光传感器、超声波传感器、涡电流式传感器或者静电容量传感器等各种类型的传感器作为垫高度传感器175。
[0139]
垫高度传感器175与控制装置40连接,并且将垫高度传感器175的输出信号(即,研磨垫3的表面的高度的测定值)发送至控制装置40。控制装置40能够通过研磨垫3的表面地高度的测定值来获取研磨垫3的轮廓(研磨垫3的表面的剖面形状)。
[0140]
在未使用的研磨垫3安装于研磨台2后,控制装置40使用垫高度测定器173来获得研磨垫3的初始高度,并且将该初始高度存储于存储部40a(参照图8)。每当研磨规定片数的晶片w时,或者进行研磨垫3的修整时,控制装置40使用垫高度测定器173来测定研磨垫3的高度(磨损高度)。控制装置40能够通过从初始高度减去磨损高度而算出研磨垫3的磨损量。这样,控制装置40能够获取作为输入至状态观测部301的状态变量的研磨垫3的磨损量。
[0141]
在研磨装置具有垫高度测定器173的情况下,也可以是,控制装置40代替上述距离传感器14而使用垫高度传感器175来算出研磨垫3与热交换器11之间的间隔距离,从而控制上下移动机构71的动作。在该情况下,控制装置40预先存储热交换器11相对于规定的基准面的初始位置。
[0142]
规定的基准面例如是在进行修整后,退避到研磨垫3的上方的修整器20的修整面。
初始位置例如是在没有进行晶片w的研磨时的热交换器11的待机位置,每当晶片w的研磨结束时,控制装置40使用上下移动机构71而使热交换器11向初始位置移动。
[0143]
如上所述,控制装置40存储研磨垫3的初始高度。因此,控制装置40能够算出位于初始位置的热交换器11与未使用的研磨垫3之间的距离。并且,控制装置40能够通过在每次研磨晶片w时使修整器20与研磨垫3的表面接触而得到当前的研磨垫3的高度。即,控制装置40能够算出位于初始位置的热交换器11与当前的研磨垫3的表面之间的距离。
[0144]
因此,控制装置40能够通过从位于初始位置的热交换器11与当前的研磨垫3的表面之间的距离减去上述间隔距离而算出致动器74的操作量。根据本实施方式,使用垫高度传感器175作为用于使热交换器11达到间隔距离的传感器。即,利用垫高度传感器175来代替测定研磨垫3与热交换器11之间的间隔距离的上述距离传感器14。因此,在研磨装置具有垫高度测定器173的情况下,由于不需要距离传感器14,因此能够降低垫温度调节装置5的制造成本。
[0145]
上述的实施方式是为了使具有本发明所属技术领域的常用知识的人能够实施本发明而记载的。上述实施方式的各种变形例对于本领域技术人员来说是理所当然能够达成的,本发明的技术思想也能够应用于其他实施方式。因此,本发明并不限于记载的实施方式,而是解释为根据由本发明要求保护的范围所定义的技术思想的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。