1.本发明属于机器人领域,尤其涉及一种集尘自洁式的扫地机器人。
背景技术:
2.随着科技的进步,社会的发展,越来越多的家庭开始使用上智能家电,智能家电的应用对于人们日常生活提供更多的便利,能够帮助人们去做一些家务或者其他事情,节约了人们闲暇的时间,扫地机器人也属于这一类家电,扫地机器人能够遵循设计好的程序进行自动在屋内行走,能够实现清理地面灰尘、毛发、细小杂物的功能,在一定程度上代替了人们使用吸尘器清理地面的动作,但是现存的扫地机器人在行进的过程中,车轮轴上会缠绕有毛发等,妨碍扫地机器人的正常运行。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出一种集尘自洁式的扫地机器人,本发明设计的集尘自洁式的扫地机器人能够在自动规避障碍物,在转向的同时自动清理缠绕在车轮轴上的毛发。
4.本发明的目的可通过下列技术方案来实现:一种集尘自洁式的扫地机器人,包括壳体,所述壳体左下壁上设有集尘腔,所述集尘腔内设有集尘装置,集尘装置用于将大面积灰尘扫向中间位置,所述壳体中部靠左设有吸尘腔,所述吸尘腔内设有吸尘装置,吸尘装置用于将灰尘卷起并吸入进固定位置存储,所述壳体中部靠右设有行进腔,所述行进腔内设有行进装置,行进装置用于扫地机器人的启停、转向功能,所述壳体右下壁上设有拖地腔,所述拖地腔内设有拖地装置,拖地装置用于将清扫后的地面润湿、拖净。
5.优选的,集尘装置包括固定在所述集尘腔上侧壁的第一传动电机,所述第一传动电机的输出轴上固定设有主动齿轮,所述集尘腔下侧壁上转动设有两根支撑轴,两根所述支撑轴上端固定设有两个从动齿轮,两个所述从动齿轮和所述主动齿轮外侧套有皮带,每个所述支撑轴的中间部位均固定设有一个集尘叶片,每个所述集尘叶片末端设有转动结构,所述集尘叶片的末端能够在集尘过程中进行回转。
6.优选的,吸尘装置包括固定在所述吸尘腔左上侧壁上的空气泵,所述空气泵右侧设有收尘盒,所述空气泵和所述收尘盒之间设置过滤网,所述收尘盒右侧壁上固定设有刮灰板,刮灰板成梳子形结构,所述壳体前侧壁上固定设有第二传动电机,所述第二传动电机设有输出端,所述壳体后侧壁上转动设有转动轴,所述转动轴与所述第二传动电机输出端相接,所述转动轴上固定设有四片卷尘毛刷片,每个所述卷尘毛刷片末端设有扭簧。
7.优选的,行进装置包括固定在所述壳体左端的传感器,所述集尘腔下侧壁上固定设有辅助轮,所述行进腔上侧壁固定设有第三传动电机,所述第三传动电机上设有传动轴,所述传动轴一端固定设有一个主锥齿轮,所述行进腔下侧壁上滑动设有两个轴支架,每个所述轴支架上设有一个车轮轴,每个所述车轮轴一端上设有一个副锥齿轮,两个所述副锥齿轮与所述主锥齿轮相啮合传动,每个所述车轮轴另一端上滑动设有一个行进轮,每个所
述轴支架上设有清理装置,清理装置用于将缠绕在车轮轴上的毛发切断、清理。
8.优选的,清理装置包括固定在两个所述轴支架下侧壁上的两个推动块,每个所述行进轮内侧壁上滑动设有一个刀片,所述刀片能够在所述轴支架限制范围内滑动,每个所述车轮轴一端固定设有一个花键,所述花键在所述行进轮内滑动。
9.优选的,拖地装置包括固定在所述拖地腔中部的水箱,所述水箱下设有喷淋器,所述拖地腔下侧壁上固定设有连接块,所述连接块向下伸出所述拖地腔外壁,所述连接块下端面设有擦地块。
10.当扫地机器人开始正常工作时,第一传动电机启动,输出端上的主动齿轮开始回转,带动主动齿轮外侧皮带回转,皮带带动着两个从动齿轮转动,两个从动齿轮下方的支撑轴开始回转,支撑轴上的集尘叶片在转动过程中将机器人前方的灰尘集中,集尘叶片末端的可回转叶片,能够在一定程度内增加集尘效率。
11.行进装置开始启动,第三传动电机启动,带动着传动轴回转,传动轴下端的主锥齿轮与两个副锥齿轮同时啮合,两个副锥齿轮带动着车轮轴回转,车轮轴带动着花键进行转动,辅助轮也在行进轮开始转动后,也随之旋转,执行扫地任务需要进行左转向或右转向,例如左转向,通过控制左侧轴支架的滑动,使得左侧车轮轴向行进轮侧横移,车轮轴右端的副锥齿轮与主锥齿轮脱离啮合,左侧行进轮停止转动,右侧行进轮持续转动,则机器人可向左侧旋转,反之亦然。同时设置在机器人前端的传感器能够检测前方是否存在障碍物,进行对第三传动电机输送电信号,使第三传动电机停止或者反转,将机器人后退。这样的行进装置能够避免机器人在工作过程中碰到障碍物,也能够更灵活的左右转向。
12.在转向的过程中,因为车轮轴左右横移,而刀片保持不动,起到对缠绕在车轮轴上的毛发进行切割作用,切割脱落后的毛发掉在推动块旁边,推动块跟着轴支架滑动而将毛发推出,避免过多毛发在机器人内部堆积,影响正常工作。
13.在行进过程中,吸尘装置和拖地装置也同时启动,空气泵开始运作,将收尘盒内形成负压状态,第二传动电机回转,带动卷尘毛刷片回转,卷尘毛刷片将地面上经过集尘装置集中后的灰尘、毛发等卷起,卷尘毛刷片末端在与刮灰板接触后将缠在卷尘毛刷片末端的毛发刮下,灰尘毛发被吸入收尘盒存放。吸尘装置运转快捷,卷尘毛刷片上设置的可转动末端能够在经过梳理后,保持干净状态,能够更好地进行下一周期回转、卷起灰尘。
14.水箱启动,通过喷淋器向地面喷洒清水,连接块上安装可替换的擦地块,擦地块进行对地面的清洁作用。
15.与现有技术相比,本集尘自洁式的扫地机器人具有以下优点:
16.1.支撑轴上的集尘叶片在转动过程中将机器人前方的灰尘集中,集尘叶片末端的可回转叶片,能够在一定程度内增加集尘效率。
17.2.能够避免机器人在工作过程中碰到障碍物,也能够更灵活的左右转向。
18.3.吸尘装置运转快捷,卷尘毛刷片上设置的可转动末端能够在经过梳理后,保持干净状态,能够更好地进行下一周期回转、卷起灰尘。
附图说明
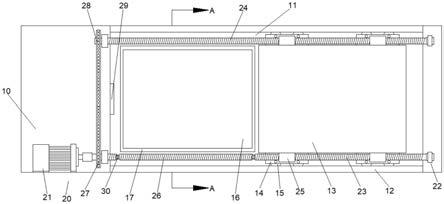
19.图1是集尘自洁式的扫地机器人的结构示意图。
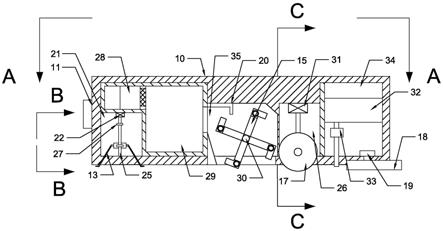
20.图2是图1中a
‑
a方向剖视图。
21.图3是图1中b
‑
b方向剖视图。
22.图4是图1中c
‑
c方向剖视图。
23.图5是图4中d
‑
d方向剖视图。
24.图6是图3中e处结构放大图。
25.图中,10、壳体;11、传感器;12、辅助轮;13、集尘叶片;14、花键;15、卷尘毛刷片;16、第二传动电机;17、行进轮;18、擦地块;19、连接块;20、刮灰板;21、集尘腔;22、第一传动电机;23、从动齿轮;24、主动齿轮;25、支撑轴;26、行进腔;27、皮带;28、空气泵;29、收尘盒;30、转动轴;31、第三传动电机;32、水箱;33、喷淋器;34、拖地腔;35、吸尘腔;36、主锥齿轮;37、轴支架;38、车轮轴;39、刀片;40、推动块;41、副锥齿轮;42、传动轴。
具体实施方式
26.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
27.如图1所示,一种集尘自洁式的扫地机器人,包括壳体10,壳体10左下壁上设有集尘腔21,集尘腔21内设有集尘装置,集尘装置用于将大面积灰尘扫向中间位置,壳体10中部靠左设有吸尘腔35,吸尘腔35内设有吸尘装置,吸尘装置用于将灰尘卷起并吸入进固定位置存储,壳体10中部靠右设有行进腔26,行进腔26内设有行进装置,行进装置用于扫地机器人的启停、转向功能,壳体10右下壁上设有拖地腔34,拖地腔34内设有拖地装置,拖地装置用于将清扫后的地面润湿、拖净。
28.如图1、图3和图5所示,集尘装置包括固定在集尘腔21上侧壁的第一传动电机22,第一传动电机22的输出轴上固定设有主动齿轮24,集尘腔21下侧壁上转动设有两根支撑轴25,两根支撑轴25上端固定设有两个从动齿轮23,两个从动齿轮23和主动齿轮24外侧套有皮带27,每个支撑轴25的中间部位均固定设有一个集尘叶片13,每个集尘叶片13末端设有转动结构,集尘叶片13的末端能够在集尘过程中进行回转。
29.如图1所示,吸尘装置包括固定在吸尘腔35左上侧壁上的空气泵28,空气泵28右侧设有收尘盒29,空气泵28和收尘盒29之间设置过滤网,收尘盒29右侧壁上固定设有刮灰板20,刮灰板20成梳子形结构,壳体10前侧壁上固定设有第二传动电机16,第二传动电机16设有输出端,壳体10后侧壁上转动设有转动轴30,转动轴30与第二传动电机16输出端相接,转动轴30上固定设有四片卷尘毛刷片15,每个卷尘毛刷片15末端设有扭簧。
30.如图1、图4和图5所示,行进装置包括固定在壳体10左端的传感器11,集尘腔21下侧壁上固定设有辅助轮12,行进腔26上侧壁固定设有第三传动电机31,第三传动电机31上设有传动轴42,传动轴42一端固定设有一个主锥齿轮36,行进腔26下侧壁上滑动设有两个轴支架37,,每个轴支架37上设有一个车轮轴38,每个车轮轴38一端上设有一个副锥齿轮41,两个副锥齿轮41与主锥齿轮36相啮合传动,每个车轮轴38另一端上滑动设有一个行进轮17,每个轴支架37上设有清理装置,清理装置用于将缠绕在车轮轴上的毛发切断、清理。
31.如图4和图5所示,清理装置包括固定在两个轴支架37下侧壁上的两个推动块40,每个行进轮17内侧壁上滑动设有一个刀片39,刀片39能够在轴支架37限制范围内滑动,每个车轮轴38一端固定设有一个花键14,花键14在行进轮17内滑动。
32.如图1所示,拖地装置包括固定在拖地腔34中部的水箱32,水箱32下设有喷淋器
33,拖地腔34下侧壁上固定设有连接块19,连接块19向下伸出拖地腔34外壁,连接块19下端面设有擦地块18。
33.当扫地机器人开始正常工作时,第一传动电机22启动,输出端上的主动齿轮24开始回转,带动主动齿轮24外侧皮带27回转,皮带27带动着两个从动齿轮23转动,两个从动齿轮23下方的支撑轴25开始回转,支撑轴25上的集尘叶片13在转动过程中将机器人前方的灰尘集中,集尘叶片13末端的可回转叶片,能够在一定程度内增加集尘效率。
34.行进装置开始启动,第三传动电机31启动,带动着传动轴42回转,传动轴42下端的主锥齿轮36与两个副锥齿轮41同时啮合,两个副锥齿轮41带动着车轮轴38回转,车轮轴38带动着花键14进行转动,辅助轮12也在行进轮17开始转动后,也随之旋转,执行扫地任务需要进行左转向或右转向,例如左转向,通过控制左侧轴支架37的滑动,使得左侧车轮轴38向行进轮17侧横移,车轮轴38右端的副锥齿轮41与主锥齿轮36脱离啮合,左侧行进轮17停止转动,右侧行进轮17持续转动,则机器人可向左侧旋转,反之亦然。同时设置在机器人前端的传感器11能够检测前方是否存在障碍物,进行对第三传动电机31输送电信号,使第三传动电机31停止或者反转,将机器人后退。这样的行进装置能够避免机器人在工作过程中碰到障碍物,也能够更灵活的左右转向。
35.在转向的过程中,因为车轮轴38左右横移,而刀片39保持不动,起到对缠绕在车轮轴38上的毛发进行切割作用,切割脱落后的毛发掉在推动块40旁边,推动块40跟着轴支架37滑动而将毛发推出,避免过多毛发在机器人内部堆积,影响正常工作。
36.在行进过程中,吸尘装置和拖地装置也同时启动,空气泵28开始运作,将收尘盒29内形成负压状态,第二传动电机16回转,带动卷尘毛刷片15回转,卷尘毛刷片15将地面上经过集尘装置集中后的灰尘、毛发等卷起,卷尘毛刷片15末端在与刮灰板20接触后将缠在卷尘毛刷片15末端的毛发刮下,灰尘毛发被吸入收尘盒29存放。吸尘装置运转快捷,卷尘毛刷片15上设置的可转动末端能够在经过梳理后,保持干净状态,能够更好地进行下一周期回转、卷起灰尘。
37.水箱32启动,通过喷淋器33向地面喷洒清水,连接块19上安装可替换的擦地块18,擦地块18进行对地面的清洁作用。
38.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。