1.本实用新型涉及机械自动化领域,尤其涉及一种便于精确控制的自动化控制载物平台。
背景技术:
2.机械自动化:自动化是指机器或装置在无人干预的情况下按预定的程序或指令自动进行操作或控制的过程,而机械自动化就是机器或者装置通过机械方式来实现自动化控制的过程。
3.现实生产中,往往存在着需要对一些高腐蚀性、有毒和一些危险物品的加工,然而一些现有的一些载物平台存在着装置只能提供存放的功能,在这种情况下存取和取出这类物品还是需要采用人工,从而导致人员伤亡的风险,对存取的工作带来极大的不便,导致工作效率低下,操作人员在操作过程中也容易发生操作失误的问题。
4.因此,有必要提供一种新的便于精确控制的自动化控制载物平台解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本实用新型提供一种具有精准控制,全自动化的便于精确控制的自动化控制载物平台。
6.本实用新型提供的便于精确控制的自动化控制载物平台,包括:底座、操作台、载物台、移动机构和抓取机构,底座的一侧固定连接有操作台,所述操作台内部设有第一电机,所述底座的顶部设置有载物台;所述底座后侧面设有挡板,
7.所述移动机构包括有第一电机,所述第一电机的输出端固定连接有第一螺纹杆,所述第一螺纹杆另一端与挡板活动连接,底座的一侧固定连接有操作台,所述底座的顶部设置有载物台;所述移动机构包括有第一电机,所述第一电机的输出端固定连接有第一螺纹杆,所述第一螺纹杆的外侧螺纹连接有第一螺纹块,所述第一螺纹块的顶部固定连接有第一支撑杆,所述第一支撑杆的顶部固定连接有顶板,所述顶板远离第一支撑杆的一端固定连接有第二支撑杆,所述第一支撑杆与第二支撑杆的内侧固定连接有固定板,所述固定板的一侧固定连接有第二电机,所述第二电机的输出端固定连接有第二螺纹杆,所述第二螺纹杆的外侧螺纹连接有第二螺纹块,所述第二螺纹块的一侧固定连接有传动杆;所述抓取机构包括有载物块,所述载物块的两侧与顶板的内壁滑动连接,所述载物块的内部安装有气缸,所述气缸的活塞杆固定连接有第一固定块,所述第一固定块的外侧固定连接有支架,所述支架的底部固定连接有第一固定杆,所述第一固定杆的外侧滑动连接有摇杆,所述摇杆顶部的内圈转动连接有第二固定杆,所述第二固定杆的一端固定连接有第二固定块所述摇杆的底部固定连接有夹板。
8.优选的,所述顶板远离第一支撑杆的一端固定连接有第二支撑杆,所述第二支撑杆的底部固定连接有滑块,所述滑块的内圈滑动连接有滑杆。
9.优选的,所述底座的内腔还设置有固定机构,所述固定机构包括有第三电机,所述第三电机的输出端固定连接有第一皮带轮。
10.优选的,所述第一皮带轮的外侧通过皮带传动连接有第二皮带轮,所述第二皮带轮的内圈固定连接有第三螺纹杆。
11.优选的,所述第三螺纹杆的外侧螺纹连接有第三螺纹块,所述第三螺纹杆的外侧还滑动连接有块体。
12.优选的,所述块体的顶部固定连接有第三支撑杆,所述第三支撑杆的一侧固定连接有第一限位块,所述第三螺纹块的顶部固定连接有第二限位块。
13.优选的,所述底座内壁的两侧均安装有风扇,所述风扇的外侧设置有防护板。
14.与相关技术相比较,本实用新型提供的便于精确控制的自动化控制载物平台具有如下有益效果:
15.本实用新型通过第一电机带动第一螺纹杆转动,第一螺纹杆带动第一螺纹块移动,第一螺纹块带动第一支撑杆移动,进而带动顶板移动,顶板带动载物块移动,载物块带动气缸移动,气缸的活塞杆带动第一固定块移动,第一固定块带动支架移动,支架带动第一固定杆移动,第一固定杆带动摇杆移动进而带动夹板移动,使得夹板夹紧危险物品,解决了装置只能提供存放的功能,在这种情况下存取和取出这类物品还是需要采用人工,从而导致人员伤亡的风险,对存取的工作带来极大的不便,导致工作效率低下,操作人员在操作过程中也容易发生操作失误的问题。
附图说明
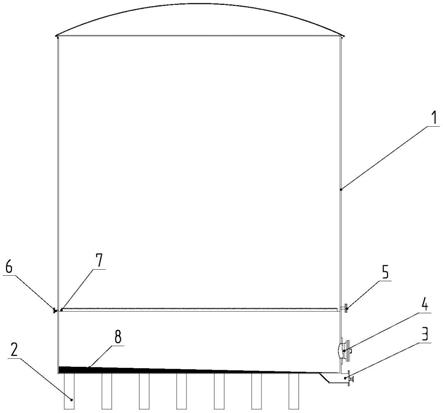
16.图1为本实用新型提供的便于精确控制的自动化控制载物平台的一种较佳实施例的结构示意图;
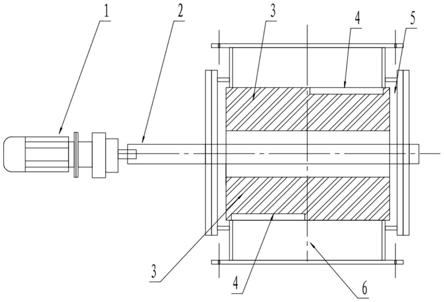
17.图2为图1所示抓取机构的结构示意图;
18.图3为图1所示的结构剖视图;
19.图4为图1所示的结构后视图。
20.图中标号:1、底座;2、操作台;3、载物台;4、移动机构;41、第一电机;42、第一螺纹杆;43、第一螺纹块;44、第一支撑杆;45、顶板;46、第二支撑杆;47、滑块;48、滑杆;49、第二电机;401、第二螺纹杆;402、第二螺纹块;403、传动杆;5、抓取机构;51、载物块;52、气缸;53、第一固定块;54、支架;55、第一固定杆;56、第二固定杆;57、摇杆;58、夹板;59、第二固定块;6、固定机构;61、第三电机;62、第一皮带轮;63、第二皮带轮;64、第三螺纹杆;65、第三螺纹块;66、块体;67、第三支撑杆;68、第一限位块;69、第二限位块;7、风扇;8、防护板;9、固定板。
具体实施方式
21.下面结合附图和实施方式对本实用新型作进一步说明。
22.请结合参阅图1、图2、图3和图4,其中图1为本实用新型提供的便于精确控制的自动化控制载物平台的一种较佳实施例的结构示意图;图2为图1所示抓取机构的结构示意图;图3为图1所示的结构剖视图;图4为图1所示的结构后视图。便于精确控制的自动化控制载物平台,包括底座1的一侧固定连接有操作台2,底座1的顶部设置有载物台3。
23.如图所示,一种便于精确控制的自动化控制载物平台,其特征在于,包括:底座1、操作台2、载物台3、移动机构4和抓取机构5,底座1的一侧固定连接有操作台2,所述操作台2内部设有第一电机41,所述底座1的顶部设置有载物台3;所述底座1后侧面设有挡板,
24.所述移动机构4包括有第一电机41,所述第一电机41的输出端固定连接有第一螺纹杆42,所述第一螺纹杆42另一端与挡板活动连接,第一螺纹杆42的外侧螺纹连接有第一螺纹块43,第一螺纹块43的顶部固定连接有第一支撑杆44,第一支撑杆44的顶部固定连接有顶板45,顶板45远离第一支撑杆44的一端固定连接有第二支撑杆46,第一支撑杆44与第二支撑杆46的相对面设有固定连接有固定板9,固定板9的一侧固定连接有第二电机49,第二电机49的输出端固定连接有第二螺纹杆401,第二螺纹杆401的外侧螺纹连接有第二螺纹块402,第二螺纹块402的一侧固定连接有传动杆403。
25.顶板45远离第一支撑杆44的一端固定连接有第二支撑杆46,第二支撑杆46的底部固定连接有滑块47,滑块47的内圈滑动连接有滑杆48。
26.需要说明的是:通过设置滑杆48和滑块47,使得装置当抓取机构5抓取到危险物品移动时,装置能有具有良好的稳定性,避免了移动时危险物品因为抖动,脱离夹板58的情况。
27.抓取机构5包括有载物块51,载物块51的两侧与顶板45的内壁滑动连接,载物块51的内部安装有气缸52,气缸52的活塞杆固定连接有第一固定块53,第一固定块53的外侧固定连接有支架54,支架54的底部固定连接有第一固定杆55,第一固定杆55的外侧滑动连接有摇杆57,摇杆57顶部的内圈转动连接有第二固定杆56,第二固定杆56的一端固定连接有第二固定块59摇杆57的底部固定连接有夹板58。
28.底座1的内腔还设置有固定机构6,固定机构6包括有第三电机61,第三电机61的输出端固定连接有第一皮带轮62。
29.第一皮带轮62的外侧通过皮带传动连接有第二皮带轮63,第二皮带轮63的内圈固定连接有第三螺纹杆64。
30.第三螺纹杆64的外侧螺纹连接有第三螺纹块65,第三螺纹杆64的外侧还滑动连接有块体66。
31.块体66的顶部固定连接有第三支撑杆67,第三支撑杆67的一侧固定连接有第一限位块68,第三螺纹块65的顶部固定连接有第二限位块69。
32.需要说明的是:当抓取机构5抓取危险物品进行存放时,第三电机61带动第一皮带轮62转动,通过设置第一皮带轮62与第二皮带轮63传动,不易产生火花,不便搬运易燃易爆的物品,通过设置第一限位块68和第二限位块69,能够夹紧和托住危险物品的底部,使得危险物品能够稳定的存放在载物台3内。
33.底座1内壁的两侧均安装有风扇7,风扇7的外侧设置有防护板8。
34.需要说明的是:设置风扇7,当需要搬运一些高温物品时,可降低底座1内腔的温度,避免腔内的温度过高影响第三电机61的正常工作的情况。
35.本实用新型提供的便于精确控制的自动化控制载物平台的工作原理如下:
36.当需要抓取载物台3内的物品时,启动第一电机41,第一电机41带动第一螺纹杆42转动,第一螺纹杆42带动第一螺纹块43移动,第一螺纹块43带动第一支撑杆44移动,第一支撑杆44带动顶板45移动,顶板45带动第二支撑杆46移动,第二支撑杆46带动滑块47移动,顶
板45带动载物块51移动,调整到相对位置还需要横向调整抓取机构5时,可启动第二电机49带动第二螺纹杆401转动,第二螺纹杆401带动第二螺纹块402移动,第二螺纹块402带动传动杆403移动,传动杆403带动第二固定块59移动,第二固定块59带动第二固定杆56移动,第二固定杆56带动摇杆57移动,摇杆57带动第一固定杆55移动,第一固定杆55带动支架54移动,支架54带动第一固定块53移动,第一固定块53带动气缸52移动,气缸52带动载物块51移动,调整完后,引入气体进入气缸52,气缸52顶起活塞杆带动第一固定块53移动,第一固定块53带动支架54移动,支架54带动第一固定杆55移动,第一固定杆55带动摇杆57移动,摇杆57带动夹板58移动,进而夹取物品,启动第三电机61带动第一皮带轮62转动,第一皮带轮62带动第二皮带轮63转动,第二皮带轮63带动第三螺纹杆64转动,进而使得第三螺纹块65带动第二限位块69松开物品。
37.与相关技术相比较,本实用新型提供的便于精确控制的自动化控制载物平台具有如下有益效果:
38.本实用新型通过第一电机41带动第一螺纹杆42转动,第一螺纹杆42带动第一螺纹块43移动,第一螺纹块43带动第一支撑杆44移动,进而带动顶板45移动,顶板45带动载物块51移动,载物块51带动气缸52移动,气缸52的活塞杆带动第一固定块53移动,第一固定块53带动支架54移动,支架54带动第一固定杆55移动,第一固定杆55带动摇杆57移动进而带动夹板58移动,使得夹板夹紧危险物品,解决了装置只能提供存放的功能,在这种情况下存取和取出这类物品还是需要采用人工,从而导致人员伤亡的风险,对存取的工作带来极大的不便,导致工作效率低下,操作人员在操作过程中也容易发生操作失误的问题。
39.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。