1.本发明涉及农用机械设备领域,具体涉及一种智能校准肥料混合设备。
背景技术:
2.肥料是指提供一种或一种以上植物必需的营养元素,改善土壤性质、提高土壤肥力水平的一类物质,是农业生产的物质基础之一。随着社会的进步,功能性肥料越来越多。有为了满足不同植物不同时期生长发育的不同需求,也有为了改良活化土壤的自带营养生物菌冲施肥等。在肥料生产过程中,需要采用混料装置对原材料或半成品物料进行混合搅拌,然后才会进行下一道工序的加工。
3.在搅拌过程中,如果混料装置发生倾斜,会导致肥料洒出,此时需要人工将洒落的肥料收回并再次投入混料装置中,这造成了人力的浪费。
技术实现要素:
4.本发明提供一种智能校准肥料混合设备,以解决现有的混料装置因安装倾斜而造成肥料易洒落的问题。
5.本发明的一种智能校准肥料混合设备采用如下技术方案:
6.一种智能校准肥料混合设备包括混料装置和支撑装置。支撑装置包括支架、摆杆、撞击块、压簧、传动机构、挤压块、弹性带轮、两个配重叶轮和单向机构;支架包括沿前后方延伸的支撑轴;摆杆的上端可转动地套接于支撑轴,摆杆内设置有前后贯通的安装槽,混料装置可拆卸地安装于摆杆的顶部;撞击块沿摆杆的延伸方向可滑动地安装于安装槽的侧壁;压簧的一端连接于撞击块,另一端连接于安装槽的底壁;传动机构包括传动带,传动带可转动地设置于安装槽内;挤压块安装于传动带的外侧,用于与撞击块顶压配合;弹性带轮用于驱动传动带转动,所述传动带的下端套装于弹性带轮。
7.两个配重叶轮分别设置于弹性带轮的前后两侧,每个配重叶轮均具有配重,以当手动拉动摆杆绕支撑轴向端部摆动时,处于较高位置的配重叶轮挤压弹性带轮,使弹性带轮的中部沿径向方向向外拱起,传动带绷紧;当摆杆由端部向竖直位置自由摆动时处于较低位置的配重叶轮受到空气阻力转动,且通过摩擦力带动弹性带轮转动,当摆杆由竖直位置向端部自由摆动时处于较高位置的配重叶轮在重力的作用下挤压弹性带轮,并通过摩擦力继续带动弹性带轮转动;当两个配重叶轮对弹性带轮的正压力减小到预设值时,弹性带轮恢复到预设状态,进而使传动带松弛到预设状态时撞击块在压簧的弹力下上升并撞击安装槽的顶壁。
8.单向机构配置成仅能使弹性带轮朝一个时针方向转动,进而使传动带仅能带动其上的挤压块向下移动挤压撞击块。
9.进一步地,传动机构还包括上定轴、下定轴和传动轮;上定轴和下定轴均设置于安装槽内,其两端均通过连接杆安装于摆杆;传动轮绕上定轴可转动地安装于摆杆,所述传动带的上端套装于传动轮;所述弹性带轮绕下定轴可转动地安装于摆杆,且上定轴和下定轴
之间的连线与摆杆的轴线平行。
10.进一步地,支撑装置还包括防倒转机构,防倒转机构包括第一弹性棘齿条和第二弹性棘齿条,第一弹性棘齿条安装于安装槽的远离撞击块一侧的槽壁,第二弹性棘齿条安装于传动带的外侧,且处于远离挤压块的一侧;第一弹性棘齿条和第二弹性棘齿条上的棘齿配置成仅能使传动带的安装有第二弹性棘齿的一侧向上移动。
11.进一步地,弹性带轮包括两个转环套、多个弹条和两个阻尼铰链;两个转环套可转动地套装于下定轴,多个弹条绕下定轴的周向均布,且处于两个转环套之间,阻尼铰链的一端连接于弹条,另一端连接于转环套。
12.进一步地,单向机构包括单向轴承,单向轴承的内圈固定套装于下定轴,外圈配置成仅能相对于内圈朝一个方向转动,且与转环套连接;配重叶轮固定套装于单向轴承的外圈,且配重叶轮的叶片配成当摆杆摆动时仅能使处于前侧的配重叶轮的迎风面能带动单向轴承的外圈转动。
13.进一步地,所述撞击块处于传动带的右侧,配重叶轮仅能带动弹性带轮沿从前向后看的顺时针方向转动。
14.进一步地,撞击块的朝向传动带的一侧面的顶部为从内向外且向上延伸的第一斜面;所述挤压块的朝向撞击块的一侧的底部为与该斜面滑动配合的第二斜面。
15.进一步地,支撑装置还包括锁紧螺钉,锁紧螺钉可拆卸地安装于支撑轴,用于使摆杆与支撑轴固定。
16.进一步地,一种智能校准肥料混合设备还包括支撑面板,支撑面板可拆卸地安装于摆杆的顶部。
17.进一步地,一种智能校准肥料混合设备还包括可伸缩支架,可伸缩支架可伸缩地设置,用于进一步支撑支撑面板。
18.一种智能校准肥料混合设备的使用方法为:
19.s1:将支架1置于地面上,拉动摆杆2的下端至一定高度,例如拉动摆杆2的下端向前移动;
20.s2:之后撤去外力使摆杆2自然下落,摆杆2不断来回摆动,当两个配重叶轮7对弹性带轮9的正压力减小到预设值时,弹性带轮9恢复到预设状态,进而使传动带5松弛到预设状态时撞击块4在压簧6的弹力下上升并撞击安装槽的顶壁,撞击块4在压簧6的作用下在安装槽内上下来回振动,并撞击摆杆2,且在撞击块4上升的过程中,压簧6的下端对摆杆2具有向上的作用力,进而减小了摆杆2与支撑轴之间的正压力,促使摆杆2更加趋近于竖直位置停止。
21.s3:当摆杆2不再摆动后,拧紧锁紧螺钉11,使摆杆2与固定轴固定。
22.s4:然后安装支撑面板204,此时支撑面板204也接近水平位置;
23.s5:之后再调整伸缩支架300,用于和支撑装置100共同支撑支撑面板204。
24.s6:之后将混料装置200安装于水平面板,此时混料装置200接近水平状态。
25.本发明的有益效果是:本发明的一种智能校准肥料混合设备在摆杆摆动的初期阶段弹性带轮在两个配重叶轮的作用下始终保持膨胀状态,使传动带保持张紧,同时通过单向轴承的设置,使得摆杆在摆动的过程中弹性带轮在配重叶轮的作用下始终朝同一方向旋转,从而使传动带始终朝向一个方向转动,使挤压块始终向下挤压撞击块,压缩压簧。随着
摆杆摆动的幅度越来越小,摆杆小幅摆动时,配重叶轮受到的空气阻力也减小,当两个配重叶轮对弹性带轮的正压力减小到预设值时,弹性带轮恢复到预设状态,进而使传动带松弛到预设状态时撞击块在压簧的弹力下上升并撞击安装槽的顶壁,撞击块在压簧的作用下在安装槽内上下来回振动,并撞击摆杆,且在撞击块上升的过程中,压簧的下端对摆杆具有向上的作用力,进而减小了摆杆与支撑轴之间的正压力,促使摆杆更加趋近于竖直位置停止。因此本发明的一种智能校准肥料混合设备即使安装在倾斜的地面也会使混料设备保持水平状态,进而防止因混料装置倾斜而造成肥料在搅拌的过程中洒落。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
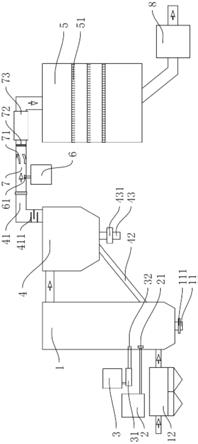
27.图1为本发明的一种智能校准肥料混合设备的实施例的结构示意图;
28.图2为本发明的一种智能校准肥料混合设备的实施例的支撑装置的结构示意图;
29.图3为本发明的一种智能校准肥料混合设备的实施例的支撑装置的主视图;
30.图4为本发明的一种智能校准肥料混合设备的实施例的支撑装置的侧视图;
31.图5为图3中a
‑
a面的剖视图;
32.图6为本发明的一种智能校准肥料混合设备的实施例的摆杆摆动时的状态图;
33.图7为本发明的一种智能校准肥料混合设备的实施例的弹性带轮的结构示意图;
34.图8为本发明的一种智能校准肥料混合设备的实施例的支撑装置停止摆动后的状态示意图。
35.图中:100、支撑装置;200、混料装置;300、伸缩支架;1、支架;2、摆杆;201、上定轴;202、下定轴;203、第一弹性棘齿条;204、支撑面板;3、传动轮;4、撞击块;5、传动带;501、挤压块;502、第二弹性棘齿条;6、压簧;7、配重叶轮;9、弹性带轮;901、阻尼铰链;902、弹条;903、转环套;10、单向轴承;11、锁紧螺钉。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.本发明的一种智能校准肥料混合设备的实施例,如图1至图8所示,一种智能校准肥料混合设备包括混料装置200和支撑装置100,支撑装置100包括支架1、摆杆2、撞击块4、压簧6、传动机构、挤压块501、弹性带轮9、两个配重叶轮7和单向机构。支架1包括沿前后方延伸的支撑轴。摆杆2的上端可转动地套接于支撑轴,摆杆2内设置有前后贯通的安装槽,混料装置200可拆卸地安装于摆杆2的顶部。撞击块4沿摆杆2的延伸方向可滑动地安装于安装槽的侧壁。压簧6的一端连接于撞击块4,另一端连接于安装槽的底壁。传动机构包括传动带5,传动带5可转动地设置于安装槽内。挤压块501安装于传动带5的外侧,用于与撞击块4顶
压配合。弹性带轮9用于驱动传动带5转动,所述传动带5的下端套装于弹性带轮9。两个配重叶轮7分别设置于弹性带轮9的前后两侧,每个配重叶轮7均具有配重,以当手动拉动摆杆2绕支撑轴向端部摆动时,处于较高位置的配重叶轮7挤压弹性带轮9,使弹性带轮9的中部沿径向方向向外拱起,传动带5绷紧;当摆杆2由端部向竖直位置自由摆动时处于较低位置的配重叶轮7受到空气阻力转动,且通过摩擦力带动弹性带轮9转动,当摆杆2由竖直位置向端部自由摆动时处于较高位置的配重叶轮7在重力的作用下挤压弹性带轮9,并通过摩擦力继续带动弹性带轮9转动;当两个配重叶轮7对弹性带轮9的正压力减小到预设值时,弹性带轮9恢复到预设状态,进而使传动带5松弛到预设状态时撞击块4在压簧6的弹力下上升并撞击安装槽的顶壁。单向机构配置成仅能使弹性带轮9朝一个时针方向转动;进而使传动带5仅能带动其上的挤压块501向下移动挤压撞击块4。
38.在本实施例中,传动机构还包括上定轴201、下定轴202和传动轮3。上定轴201和下定轴202均设置于安装槽内,其两端均通过连接杆安装于摆杆2。传动轮3绕上定轴201可转动地安装于摆杆2,所述传动带5的上端套装于传动轮3;所述弹性带轮9绕下定轴202可转动地安装于摆杆2,且上定轴201和下定轴202之间的连线与摆杆2的轴线平行。
39.在本实施例中,支撑装置100还包括防倒转机构,防倒转机构包括第一弹性棘齿条203和第二弹性棘齿条502,第一弹性棘齿条203安装于安装槽的远离撞击块4一侧的槽壁,第二弹性棘齿条502安装于传动带5的外侧,且处于远离挤压块501的一侧;第一弹性棘齿条203和第二弹性棘齿条502上的棘齿配置成仅能使传动带5的安装有第二弹性棘齿的一侧向上移动,也就是说,仅能使传动带5的安装有挤压块501的一侧向下移动,防止传动带5松弛后传动带5倒转。
40.在本实施例中,弹性带轮9包括两个转环套903、多个弹条902和两个阻尼铰链901;两个转环套903可转动地套装于下定轴202,多个弹条902绕下定轴202的周向均布,且处于两个转环套903之间,阻尼铰链901的一端连接于弹条902,另一端连接于转环套903,以延迟配重叶轮7对弹性带轮9的挤压作用力。
41.在本实施例中,单向机构包括单向轴承10,单向轴承10的内圈固定套装于下定轴202,外圈配置成仅能相对于内圈朝一个方向转动,且与转环套903连接;配重叶轮7固定套装于单向轴承10的外圈,且配重叶轮7的叶片配成当摆杆2摆动时仅能使处于前侧的配重叶轮7的迎风面能带动单向轴承10的外圈转动。
42.在本实施例中,所述撞击块4处于传动带5的右侧,配重叶轮7仅能带动弹性带轮9沿从前向后看的顺时针方向转动。
43.在本实施例中,撞击块4的朝向传动带5的一侧面的顶部为从内向外且向上延伸的第一斜面;所述挤压块501的朝向撞击块4的一侧的底部为与该斜面滑动配合的第二斜面,以使挤压块501向下挤压撞击块4,且使撞击块4能通过第一斜面和第二斜面向上滑动。
44.在本实施例中,支撑装置100还包括锁紧螺钉11,锁紧螺钉11可拆卸地安装于支撑轴,用于在摆杆2停止摆动后使摆杆2与支撑轴固定。
45.在本实施例中,一种智能校准肥料混合设还包括支撑面板204,支撑面板204可拆卸地安装于摆杆2的顶部,用于支撑混料装置200。
46.在本实施例中,一种智能校准肥料混合设备还包括可伸缩支架300,可伸缩支架300可伸缩地设置,用于进一步支撑支撑面板204,使支撑面板204保持平稳。
47.一种智能校准肥料混合设备的实施例在工作时,将支架1置于地面上,拉动摆杆2的下端至一定高度,例如拉动摆杆2的下端向前移动,在此过程中,处于前侧的配重叶轮7在重力的作用下向靠近弹性带轮9的一侧移动,挤压弹性带轮9,多个弹条902的中部沿径向方向向外拱起,使得弹性带轮9处于扩张状态,传动带5被撑紧。
48.之后撤去外力使摆杆2自然下落,在摆杆2由前端部向竖直位置摆动的过程中,处于前侧的配重叶轮7与弹性带轮9失去相互作用力,但由于弹条902与转环套903通过阻尼铰链901连接,因此弹条902开始缓慢恢复形变,在此过程中,摆杆2的速度逐渐加快,处于后侧的配重叶轮7受到的空气阻力不断增加开始转动,驱使两个配重叶轮7开始紧压弹性带轮9,使弹性带轮9始终保持膨胀状态,进而使传动带5保持撑紧状态,且配重叶轮7转动时通过单向轴承10带动转环套903沿从前向后的顺时针转动,转环套903通过阻尼铰链901带动多个弹条902顺时针转动,从而使多个弹条902带动传动带5顺时针转动,传动带5转动过程中,由于传动带5是撑紧状态,传动带5上的挤压块501会压着撞击块4下移,从而压缩压簧6。
49.当摆杆2摆过竖直位置继续向后端摆动时,摆杆2的摆速逐渐减小,处于后侧的配重叶轮7受到的空气阻力也减小,但此时处于后侧的配重叶轮7在重力作用下向弹性带轮9的一侧靠近,不断挤压弹性带轮9,因此在摆杆2由前端部向后端部摆动的过程中弹性带轮9始终受到配重叶轮7的挤压作用保持膨胀状态,也即传动带5始终被撑紧,处于后侧的配重叶轮7仍在空气阻力的作用下转动,并通过摩擦力带动弹性带轮9持续转动,进而带动传动带5转动,使挤压块501继续相下挤压撞击块4,压簧6被压缩。
50.当摆杆2从后端向竖直位置回摆时,后侧的配重叶轮7与弹性带轮9之间失去相互作用力,弹条902在阻尼铰链901的作用下开始缓慢恢复形变,在此过程中,处于前侧的配重叶轮7的空气阻力不断增加开始转动,驱使两个配重叶轮7开始紧压弹性带轮9,使弹性带轮9始终保持膨胀状态,进而使传动带5保持撑紧状态,且配重叶轮7转动时通过单向轴承10带动转环套903沿从前向后的顺时针转动,转环套903通过阻尼铰链901带动多个弹条902顺时针转动,从而使多个弹条902带动传动带5顺时针转动,传动带5转动过程中,由于传动带5是撑紧状态,传动带5上的挤压块501会压着撞击块4下移,从而压缩压簧6。
51.当摆杆2摆过竖直位置后继续向前端摆动时,摆杆2的摆速逐渐减小,处于前侧的配重叶轮7受到的空气阻力也减小,但此时处于前侧的配重叶轮7在重力作用下向弹性带轮9的一侧靠近,不断挤压弹性带轮9,因此在摆杆2由后端部向前端部摆动的过程中弹性带轮9也始终受到配重叶轮7的挤压作用保持膨胀状态,也即传动带5始终被撑紧,处于后侧的配重叶轮7仍在空气阻力的作用下转动,并通过摩擦力带动弹性带轮9持续转动,进而带动传动带5转动,使挤压块501继续相下挤压撞击块4,压簧6被压缩。
52.摆杆2不断来回摆动,当摆杆2摆动幅度越来越小时,摆杆2在竖直位置附近的摆速越来越小,配重叶轮7受到的空气阻力也越来越小,且配重叶轮7的重力势能也逐渐变小,因此弹性带轮9受到的压力也越来越小,弹性带轮9对传动带5的张紧作用也越来越小,但由于第一弹性棘齿条203和第二弹性棘齿条502的限制使得传动带5即使在松弛的状态下也不会逆转,当两个配重叶轮7对弹性带轮9的正压力减小到预设值时,弹性带轮9恢复到预设状态,进而使传动带5松弛到预设状态时撞击块4在压簧6的弹力下上升并撞击安装槽的顶壁,撞击块4在压簧6的作用下在安装槽内上下来回振动,并撞击摆杆2,且在撞击块4上升的过程中,压簧6的下端对摆杆2具有向上的作用力,进而减小了摆杆2与支撑轴之间的正压力,
促使摆杆2更加趋近于竖直位置停止。
53.当摆杆2不再摆动后,拧紧锁紧螺钉11,使摆杆2与固定轴固定。然后安装支撑面板204,此时支撑面板204也接近水平位置,之后再调整伸缩支架300,用于和支撑装置100共同支撑支撑面板204。之后将混料装置200安装于水平面板,此时混料装置200接近水平状态。
54.一种智能校准废料混合设备的使用方法为:
55.s1:将支架1置于地面上,拉动摆杆2的下端至一定高度,例如拉动摆杆2的下端向前移动;
56.s2:之后撤去外力使摆杆2自然下落,摆杆2不断来回摆动,当两个配重叶轮7对弹性带轮9的正压力减小到预设值时,弹性带轮9恢复到预设状态,进而使传动带5松弛到预设状态时撞击块4在压簧6的弹力下上升并撞击安装槽的顶壁,撞击块4在压簧6的作用下在安装槽内上下来回振动,并撞击摆杆2,且在撞击块4上升的过程中,压簧6的下端对摆杆2具有向上的作用力,进而减小了摆杆2与支撑轴之间的正压力,促使摆杆2更加趋近于竖直位置停止。
57.s3:当摆杆2不再摆动后,拧紧锁紧螺钉11,使摆杆2与固定轴固定。
58.s4:然后安装支撑面板204,此时支撑面板204也接近水平位置;
59.s5:之后再调整伸缩支架300,用于和支撑装置100共同支撑支撑面板204。
60.s6:之后将混料装置200安装于水平面板,此时混料装置200接近水平状态。
61.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。