1.本发明属于机械传动设计技术领域,具体涉及一种双螺母行星滚柱丝杠预紧零件设计方法。
背景技术:
2.行星滚柱丝杠是一种具有高精度、高承载、高刚度和高可靠性的螺旋传动机构。双螺母行星滚柱丝杠利用双螺母结构不仅消除了传动间隙并进一步的提升了传动刚度,因此在大负载、高精度且安装空间有限的工作条件下有着巨大的应用前景。双螺母行星滚柱丝杠预紧零件的设计,是保证其传动精度和使用寿命的基础。若预紧力过小,则无法达到所需要的传动刚度且无法完全消除传动间隙;若预紧力过大,会对传动零件造成外的磨损减少其使用寿命,甚至会对部分零件造成破坏。因而,预紧零件的设计应引起足够重视。
3.由于尚无公开资料给出双螺母行星滚柱丝杠的预紧零件材料和尺寸、预紧螺栓组受力设计方法,因此,目前的公开资料中的双螺母行星滚柱丝杠预紧力计算方法采用了双螺母滚珠丝杠简化计算公式。但是,行星滚柱丝杠在结构特征和承载方式上都与滚柱丝杠有很大差异。行星滚柱丝杠采用滚柱作为丝杠和螺母之间的承力零件,利用交错螺纹结构增加了单位体积内的承力点数量。然而,现有的设计方法既未考虑交错螺纹结构也未计入滚柱螺纹的载荷分布,因此使得设计出的双螺母行星滚柱丝杠在承载能力、刚度上存在较大误差,使得双螺母行星滚柱丝杠在工程应用中的可靠性差。
技术实现要素:
4.有鉴于此,本发明提供了一种双螺母行星滚柱丝杠预紧零件设计方法,以便解决上述提到的技术问题。
5.本发明的技术方案是:
6.一种双螺母行星滚柱丝杠预紧零件设计方法,包括以下步骤:
7.s1:将双螺母行星滚柱丝杠结构离散为弹簧系统;
8.s2:给定双螺母初始预紧力;
9.s3:计算仅受预紧力时,两个螺母的弹性位移;
10.s4:给定预紧零件材料类型和几何尺寸,并计算其刚度;
11.s5:计算预紧用螺栓组受力;
12.s6:给定预紧用螺栓规格和数量;
13.s7:校核预紧用螺旋组是否满足强度要求,若不满足强度要求则可跳转到步骤s2,分别修改双螺母初始预紧力、预紧零件材料和尺寸或预紧螺栓规格和数量,然后重新计算直至满足强度要求;
14.s8:计算在外载荷作用下,两个螺母所受到的实际预紧力;
15.s9:判断螺母所受最小预紧力是否大于许用值,若螺母所受最小预紧力小于许用值,修改双螺母初始预紧力后,跳转到步骤s3,直至螺母所受最小预紧力大于许用值;
16.s10:输出双螺母初始预紧力、预紧零件材料、预紧零件尺寸、预紧用螺栓组规格和数量。
17.优选的,将双螺母行星滚柱丝杠结构离散为弹簧系统的方法,包括以下步骤:
18.s11:用弹簧单元模拟各螺母、滚柱和丝杠的轴段变形,接触单元用于模拟滚柱和丝杠以及滚柱和各螺母、各个螺纹牙之间的接触变形,弹簧单元与接触单元通过刚体单元相连接,各个单元的端部均设置有节点;
19.s12:按下式(1)——(6)计算相关弹簧系统的相关参数,
20.n
ce
=4n
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
21.n
nae
=n
nbe
=n
t
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
22.n
re
=4n
t
‑2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
23.n
se
=2n
t
1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
24.n
element
=8n
t
‑3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
25.n
node
=8n
t
2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
26.其中,
27.n
t
——滚柱的螺纹牙的数量;
28.n
ce
——接触单元的数量;
29.n
nae
——螺母a中弹簧单元的数量;
30.n
nbe
——螺母b中弹簧单元的数量;
31.n
re
——滚柱弹簧单元的数量;
32.n
se
——丝杠弹簧单元的数量;
33.n
element
——系统弹簧单元的总数;
34.n
node
——系统节点的总数;
35.s13:依据弹簧系统的变形协调条件,建立单元变形向量δ和节点弹性位移向量u的关系式如下式(7),
36.δ=a
·
u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
37.其中,
[0038][0039]
[0040][0041][0042][0043][0044]
矩阵c
nra
、c
nrb
、c
sra
和c
srb
中的非零元素分别为:
[0045]
c
nra
(m,m)=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0046]
c
nra
(m,2(n
nae
1) n
se
1 2m)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0047]
c
nrb
(m,m n
nae
1)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0048][0049]
c
sra
(m,m 2(n
nae
1) 1)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0050]
c
sra
(m,2(n
nae
1) n
se
1 2m
‑
1)=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0051][0052][0053]
式中:
[0054]
a——系统伴随矩阵;
[0055]
m——m=1,2,
…
,n
t
,滚柱上的螺纹牙编号。
[0056]
优选的,仅受预紧力时,两个螺母的弹性位移的计算方法,包括以下步骤:
[0057]
s31:按下式(22)计算各螺母和滚柱之间的接触单元的初始受力丝杠和滚柱之间接触单元的初始受力
[0058][0059]
式中:
[0060]
n
roller
——单个螺母内滚柱的数量;
[0061]
f
pre0
——双螺母初始预紧力;
[0062]
——各螺母和滚柱之间的接触单元的初始受力;
[0063]
——丝杠和滚柱之间接触单元的初始受力;
[0064]
n
t
——滚柱的螺纹牙的数量;
[0065]
j——j=1,2,
…
,2n
t
表示第j个接触单元;
[0066]
s32:按下式(23)计算螺母和滚柱之间接触单元的刚度k
nrj
,按下式(24)计算丝杠和滚柱之间接触单元的刚度k
srj
,
[0067][0068][0069]
式中:
[0070]
k
nrj
——螺母和滚柱之间接触单元的刚度;
[0071]
k
srj
——丝杠和滚柱之间接触单元的刚度;
[0072]
——各螺母和滚柱之间的接触单元的初始受力;
[0073]
——丝杠和滚柱之间接触单元的初始受力;
[0074]
λ
nr
——滚柱在螺母侧接触点处的螺旋升角;
[0075]
β
nr
——滚柱在螺母侧接触点处的牙侧角;
[0076]
e
nr
——滚柱和螺母接触区域的等效弹性模量;
[0077]
r
nr
——滚柱在螺母侧接触点处的等效曲率半径;
[0078]
θ
nr
——滚柱和螺母接触点处的曲率比值;
[0079]
λ
sr
——滚柱在丝杠侧接触点处的螺旋升角;
[0080]
β
sr
——滚柱在丝杠侧接触点处的牙侧角;
[0081]
e
sr
——滚柱和丝杠接触区域的等效弹性模量;
[0082]
r
sr
——滚柱在丝杠侧接触点处的等效曲率半径值;
[0083]
θ
sr
——滚柱和丝杠接触点处的曲率比值;
[0084]
s33:按下式(25)计算丝杠、各螺母和滚柱弹簧单元的刚度,
[0085][0086]
式中:
[0087]
i——s,na,nb或r分别表示丝杠、螺母a、螺母b和滚柱;k
ei
——弹簧单元的刚度;
[0088]
e
i
——弹性模量;
[0089]
a
ei
——单元横截面积;
[0090]
l
ei
——单元长度;
[0091]
s34:按下式(26)计算系统刚度矩阵k;
[0092][0093]
其中,
[0094][0095][0096][0097]
[0098][0099][0100]
式中,
[0101]
n
ce
——接触单元的数量;
[0102]
n
nae
——螺母a中弹簧单元的数量;
[0103]
n
nbe
——螺母b中弹簧单元的数量;
[0104]
n
re
——滚柱弹簧单元的数量;
[0105]
n
se
——丝杠弹簧单元的数量;
[0106]
n
element
——系统弹簧单元的总数;
[0107]
s35:按下式(33)计算弹簧系统的节点弹性位移u,当只考虑各螺母所受预紧力时,按下式(34)计算弹簧系统中节点所受到的外载荷f
node
,
[0108]
u=(a
t
·
k
·
a)
‑1f
node
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0109][0110]
式中:
[0111]
u——弹簧系统的节点弹性位移;
[0112]
a——系统伴随矩阵;
[0113]
k——系统刚度矩阵;
[0114]
n
nae
——螺母a中弹簧单元的数量;
[0115]
n
node
——系统节点的总数;
[0116]
f
pre0
——双螺母初始预紧力;
[0117]
f
node
——弹簧系统中节点所受到的外载荷;
[0118]
s36:按下式(35)计算螺母和滚柱以及丝杠和滚柱之间接触单元的受力f
element
,按下式(36)计算螺母和滚柱之间接触单元的受力按下式(37)计算丝杠和滚柱之间接触
单元的受力
[0119]
f
element
=k
·
a
·
u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(35)
[0120][0121][0122]
式中:
[0123]
u——弹簧系统的节点弹性位移;
[0124]
a——系统伴随矩阵;
[0125]
k——系统刚度矩阵;
[0126]
f
element
——螺母和滚柱以及丝杠和滚柱之间接触单元的受力向量;
[0127]
——螺母和滚柱之间接触单元的计算受力;
[0128]
——丝杠和滚柱之间接触单元的计算受力;
[0129]
n
ce
——接触单元的数量;
[0130]
n
nae
——螺母a中弹簧单元的数量;
[0131]
n
nbe
——螺母b中弹簧单元的数量;
[0132]
n
re
——滚柱弹簧单元的数量;
[0133]
n
se
——丝杠弹簧单元的数量;
[0134]
s37:按下式(38)计算接触单元的初始受力和计算受力的差值ε,
[0135][0136]
式中:
[0137]
ε——接触单元的初始受力和计算受力的差值;
[0138]
n
t
——滚柱的螺纹牙的数量;
[0139]
——螺母和滚柱之间接触单元的计算受力;
[0140]
——丝杠和滚柱之间接触单元的计算受力;
[0141]
——各螺母和滚柱之间的接触单元的初始受力;
[0142]
——丝杠和滚柱之间接触单元的初始受力;
[0143]
s38:判断不等式ε<0.001是否成立,若该不等式不成立,则令和然后转至步骤s32,直至该不等式成立;
[0144]
s39:仅受预紧力时,按下式(39)计算螺母a的弹性位移u
a
,按下式(40)计算螺母b的弹性位移u
b
,
[0145]
u
a
=u(n
nae
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(39)
[0146]
u
b
=u(n
nae
2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(40)
[0147]
其中,
[0148]
u
a
——螺母a的弹性位移;
[0149]
u
b
——螺母b的弹性位移;
[0150]
u——弹簧系统的节点弹性位移;
[0151]
n
nae
——螺母a中弹簧单元的数量。
[0152]
优选的,按下式(41)计算预紧零件的刚度,
[0153][0154]
式中:
[0155]
k
sp
——预紧零件的刚度;
[0156]
e
sp
——预紧零件的弹性模量;
[0157]
h
sp
——预紧零件的厚度;
[0158]
d
sp_in
——预紧零件的内径;
[0159]
d
sp_out
——预紧零件的外径。
[0160]
优选的,按下式(42)计算预紧用螺栓组受力f
bolt
,
[0161]
f
bolt
=(|u
a
| |u
b
| h
sp
‑
g
n
)
·
k
sp
f
pre0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(42)
[0162]
式中:
[0163]
g
n
——螺母a和螺母b之间的初始间隙;
[0164]
f
bolt
——预紧用螺栓组受力;
[0165]
h
sp
——预紧零件的厚度;
[0166]
k
sp
——预紧零件的刚度;
[0167]
f
pre0
——双螺母初始预紧力;
[0168]
u
a
——螺母a的弹性位移;
[0169]
u
b
——螺母b的弹性位移。
[0170]
优选的,计算在外载荷作用下,两个螺母所受到的实际预紧力的方法,包括以下步骤:
[0171]
s81:按下式(43)计算在螺母负载f
n
作用下,弹簧系统中节点所受到的外载荷f
node
,
[0172][0173]
其中,
[0174]
f
node
——弹簧系统中节点所受到的外载荷;
[0175]
n
node
——系统节点的总数;
[0176]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0177]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0178]
n
nae
——螺母a中弹簧单元的数量;
[0179]
s82:建立如下式(44)的非线性方程组,
[0180][0181]
其中,
[0182]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0183]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0184]
f
node
——弹簧系统中节点所受到的外载荷;
[0185]
f
bolt
——预紧用螺栓组受力;
[0186]
f
sp
——预紧零件的受力;
[0187]
k
nrj
——螺母和滚柱之间接触单元的刚度;
[0188]
k
srj
——丝杠和滚柱之间接触单元的刚度;
[0189]
f
n
——双螺母行星滚柱丝杠所受的外部负载;
[0190]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0191]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0192]
h
sp
——预紧零件的厚度;
[0193]
k
sp
——预紧零件的刚度;
[0194]
u
a
——螺母a的弹性位移;
[0195]
u
b
——螺母b的弹性位移;
[0196]
s83:令f
prea
和f
preb
的初值分别为f
pre0
和f
pre0
f
n
,按下式(45)计算f
nrj
的初值,按下式(46)计算f
srj
的初值,
[0197][0198][0199]
其中,
[0200]
f
pre0
——双螺母初始预紧力;
[0201]
n
roller
——单个螺母内滚柱的数量;
[0202]
n
t
——滚柱的螺纹牙的数量;
[0203]
f
n
——双螺母行星滚柱丝杠所受的外部负载;
[0204]
f
nrj
——螺母和滚柱之间接触单元的受力;
[0205]
f
srj
——丝杠和滚柱之间接触单元的受力;
[0206]
将上述初值代入非线性方程组,求取在外载荷作用下,两个螺母所受到的实际预紧力f
prea
和f
preb
。
[0207]
本发明提供的一种双螺母行星滚柱丝杠预紧零件设计方法,能够对不同尺寸规格和不同受力状态下,双螺母行星滚柱丝杠的预紧力、预紧零件材料和尺寸以及预紧螺栓组受力进行设计,解决了现阶段尚无双螺母行星滚柱丝杠预紧零件设计方法的问题,设计出的双螺母行星滚柱丝杠在承载能力、刚度上的准确性提高,使得双螺母行星滚柱丝杠在工程应用中的可靠性高,实用性强,值得推广。
附图说明
[0208]
图1为本发明的双螺母行星滚柱丝杠预紧零件设计流程;
[0209]
图2为本发明的双螺母行星滚柱丝杠的结构示意图;
[0210]
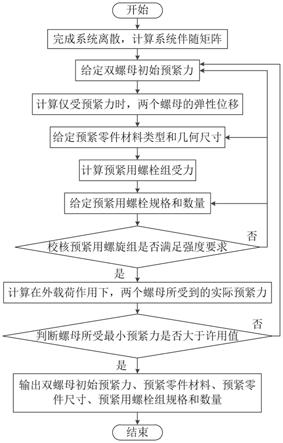
图3为本发明的双螺母行星滚柱丝杠的结构离散示意图。
具体实施方式
[0211]
本发明提供了一种双螺母行星滚柱丝杠预紧零件设计方法,下面结合图1到图3的结构示意图,对本发明进行说明。
[0212]
一种双螺母行星滚柱丝杠预紧零件设计方法,如图1所示,包括以下步骤:
[0213]
s1:将双螺母行星滚柱丝杠结构离散为弹簧系统;
[0214]
s2:给定双螺母初始预紧力;
[0215]
s3:计算仅受预紧力时,两个螺母的弹性位移;
[0216]
s4:给定预紧零件材料类型和几何尺寸,并计算其刚度;
[0217]
s5:计算预紧用螺栓组受力;
[0218]
s6:给定预紧用螺栓规格和数量;
[0219]
s7:校核预紧用螺旋组是否满足强度要求,若不满足强度要求则可跳转到步骤s2,分别修改双螺母初始预紧力、预紧零件材料和尺寸或预紧螺栓规格和数量,然后重新计算直至满足强度要求;
[0220]
s8:计算在外载荷作用下,两个螺母所受到的实际预紧力;
[0221]
s9:判断螺母所受最小预紧力是否大于许用值,若螺母所受最小预紧力小于许用值,修改双螺母初始预紧力后,跳转到步骤s3,直至螺母所受最小预紧力大于许用值;
[0222]
s10:输出双螺母初始预紧力、预紧零件材料、预紧零件尺寸、预紧用螺栓组规格和数量。
[0223]
进一步的,步骤s1的具体操作包括:
[0224]
s11:已知一种双螺母行星滚柱丝杠结构如图2所示,主要包括螺母a1、螺母b2、滚柱3、丝杠4、预紧零件5、预紧螺栓6和保持架7。螺母a1和螺母b2内部安装有两套相互独立的滚柱3。所有滚柱3均与丝杠4相接触。保持架6使得滚柱均匀的分布在螺母a1和螺母b2的内部。预紧零件5位于螺母a1和螺母b2的中间,通过预紧螺栓6对该双螺母行星滚柱丝杠施加预紧力,消除传动间隙并增加传动刚度。
[0225]
将双螺母行星滚柱丝杠离散为如图3所示的弹簧系统,包括弹簧单元8、接触单元9、刚体单元10和节点11。弹簧单元8用于模拟螺母a1、螺母b2、滚柱3和丝杠4的轴段变形。接触单元9用于模拟滚柱3和丝杠4以及滚柱3和螺母a1或螺母b2各个螺纹牙之间的接触变形。弹簧单元8与接触单元9通过刚体单元10相连接,各个单元的端部均设置有节点11。图3中,f
pre0
为双螺母行星滚柱丝杠的初始预紧力;f
n
为双螺母丝杠所受外载荷;点a是螺母a受力的作用点;点b是螺母b受力的作用点。
[0226]
s12:根据滚柱的螺纹牙的数量n
t
,接触单元的数量n
ce
为:
[0227]
n
ce
=4n
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0228]
螺母a和螺母b中弹簧单元的数量n
nae
和n
nbe
为:
[0229]
n
nae
=n
nbe
=n
t
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0230]
滚柱弹簧单元的数量n
re
为:
[0231]
n
re
=4n
t
‑2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0232]
丝杠弹簧单元的数量n
se
为:
[0233]
n
se
=2n
t
1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0234]
系统弹簧单元的总数n
element
为:
[0235]
n
element
=8n
t
‑3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0236]
系统节点的总数n
node
为:
[0237]
n
node
=8n
t
2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0238]
上述式子中,
[0239]
n
t
——滚柱的螺纹牙的数量;
[0240]
n
ce
——接触单元的数量;
[0241]
n
nae
——螺母a中弹簧单元的数量;
[0242]
n
nbe
——螺母b中弹簧单元的数量;
[0243]
n
re
——滚柱弹簧单元的数量;
[0244]
n
se
——丝杠弹簧单元的数量;
[0245]
n
element
——系统弹簧单元的总数;
[0246]
n
node
——系统节点的总数;
[0247]
s13:依据弹簧系统的变形协调条件,建立单元变形向量δ和节点弹性位移向量u的关系式如下式(7),
[0248]
δ=a
·
u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0249]
式中:a——系统伴随矩阵。
[0250][0251]
式中:
[0252][0253][0254]
式中:
[0255][0256]
[0257][0258]
矩阵c
nra
、c
nrb
、c
sra
和c
srb
中的非零元素分别为:
[0259]
c
nra
(m,m)=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0260]
c
nra
(m,2(n
nae
1) n
se
1 2m)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0261]
c
nrb
(m,m n
nae
1)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0262][0263]
c
sra
(m,m 2(n
nae
1) 1)=
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0264]
c
sra
(m,2(n
nae
1) n
se
1 2m
‑
1)=1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0265][0266][0267]
式中:
[0268]
a——系统伴随矩阵;
[0269]
m——m=1,2,
…
,n
t
,滚柱上的螺纹牙编号。
[0270]
进一步的,步骤s3的具体操作包括:
[0271]
s31:按下式(22)计算各螺母和滚柱之间的接触单元的初始受力丝杠和滚柱之间接触单元的初始受力
[0272][0273]
式中:
[0274]
n
roller
——单个螺母内滚柱的数量;
[0275]
f
pre0
——双螺母初始预紧力;
[0276]
——各螺母和滚柱之间的接触单元的初始受力;
[0277]
——丝杠和滚柱之间接触单元的初始受力;
[0278]
n
t
——滚柱的螺纹牙的数量;
[0279]
j——j=1,2,
…
,2n
t
表示第j个接触单元;
[0280]
s32:按下式(23)计算螺母和滚柱之间接触单元的刚度k
nrj
,按下式(24)计算丝杠和滚柱之间接触单元的刚度k
srj
,
[0281][0282][0283]
式中:
[0284]
k
nrj
——螺母和滚柱之间接触单元的刚度;
[0285]
k
srj
——丝杠和滚柱之间接触单元的刚度;
[0286]
——各螺母和滚柱之间的接触单元的初始受力;
[0287]
——丝杠和滚柱之间接触单元的初始受力;
[0288]
λ
nr
——滚柱在螺母侧接触点处的螺旋升角;
[0289]
β
nr
——滚柱在螺母侧接触点处的牙侧角;
[0290]
e
nr
——滚柱和螺母接触区域的等效弹性模量;
[0291]
r
nr
——滚柱在螺母侧接触点处的等效曲率半径;
[0292]
θ
nr
——滚柱和螺母接触点处的曲率比值;
[0293]
λ
sr
——滚柱在丝杠侧接触点处的螺旋升角;
[0294]
β
sr
——滚柱在丝杠侧接触点处的牙侧角;
[0295]
e
sr
——滚柱和丝杠接触区域的等效弹性模量;
[0296]
r
sr
——滚柱在丝杠侧接触点处的等效曲率半径值;
[0297]
θ
sr
——滚柱和丝杠接触点处的曲率比值;
[0298]
s33:按下式(25)计算丝杠、各螺母和滚柱弹簧单元的刚度,
[0299][0300]
式中:
[0301]
i——s,na,nb或r分别表示丝杠、螺母a、螺母b和滚柱;
[0302]
k
ei
——弹簧单元的刚度;
[0303]
e
i
——弹性模量;
[0304]
a
ei
——单元横截面积;
[0305]
l
ei
——单元长度;
[0306]
s34:按下式(26)计算系统刚度矩阵k;
[0307]
[0308]
其中,
[0309][0310][0311][0312][0313][0314][0315]
式中,
[0316]
n
ce
——接触单元的数量;
[0317]
n
nae
——螺母a中弹簧单元的数量;
[0318]
n
nbe
——螺母b中弹簧单元的数量;
[0319]
n
re
——滚柱弹簧单元的数量;
[0320]
n
se
——丝杠弹簧单元的数量;
[0321]
n
element
——系统弹簧单元的总数;
[0322]
s35:按下式(33)计算弹簧系统的节点弹性位移u,当只考虑各螺母所受预紧力时,按下式(34)计算弹簧系统中节点所受到的外载荷f
node
,
[0323]
u=(a
t
·
k
·
a)
‑1f
node
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0324][0325]
式中:
[0326]
u——弹簧系统的节点弹性位移;
[0327]
a——系统伴随矩阵;
[0328]
k——系统刚度矩阵;
[0329]
n
nae
——螺母a中弹簧单元的数量;
[0330]
n
node
——系统节点的总数;
[0331]
f
pre0
——双螺母初始预紧力;
[0332]
f
node
——弹簧系统中节点所受到的外载荷;
[0333]
s36:按下式(35)计算螺母和滚柱以及丝杠和滚柱之间接触单元的受力f
element
,按下式(36)计算螺母和滚柱之间接触单元的受力按下式(37)计算丝杠和滚柱之间接触单元的受力
[0334]
f
element
=k
·
a
·
u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(35)
[0335][0336][0337]
式中:
[0338]
u——弹簧系统的节点弹性位移;
[0339]
a——系统伴随矩阵;
[0340]
k——系统刚度矩阵;
[0341]
f
element
——螺母和滚柱以及丝杠和滚柱之间接触单元的受力向量;
[0342]
——螺母和滚柱之间接触单元的计算受力;
[0343]
——丝杠和滚柱之间接触单元的计算受力;
[0344]
n
ce
——接触单元的数量;
[0345]
n
nae
——螺母a中弹簧单元的数量;
[0346]
n
nbe
——螺母b中弹簧单元的数量;
[0347]
n
re
——滚柱弹簧单元的数量;
[0348]
n
se
——丝杠弹簧单元的数量;
[0349]
按下式(38)计算接触单元的初始受力和计算受力的差值ε,
[0350]
[0351]
式中:
[0352]
ε——接触单元的初始受力和计算受力的差值;
[0353]
n
t
——滚柱的螺纹牙的数量;
[0354]
——螺母和滚柱之间接触单元的计算受力;
[0355]
——丝杠和滚柱之间接触单元的计算受力;
[0356]
——各螺母和滚柱之间的接触单元的初始受力;
[0357]
——丝杠和滚柱之间接触单元的初始受力;
[0358]
s38:判断不等式ε<0.001是否成立,若该不等式不成立,则令和然后转至步骤s32,直至该不等式成立;
[0359]
s39:仅受预紧力时,按下式(39)计算螺母a的弹性位移u
a
,按下式(40)计算螺母b的弹性位移u
b
,
[0360]
u
a
=u(n
nae
1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(39)
[0361]
u
b
=u(n
nae
2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(40)
[0362]
其中,
[0363]
u
a
——螺母a的弹性位移;
[0364]
u
b
——螺母b的弹性位移;
[0365]
u——弹簧系统的节点弹性位移;
[0366]
n
nae
——螺母a中弹簧单元的数量。
[0367]
进一步的,按下式(41)计算预紧零件的刚度,
[0368][0369]
式中:
[0370]
k
sp
——预紧零件的刚度;
[0371]
e
sp
——预紧零件的弹性模量;
[0372]
h
sp
——预紧零件的厚度;
[0373]
d
sp_in
——预紧零件的内径;
[0374]
d
sp_out
——预紧零件的外径。
[0375]
进一步的,按下式(42)计算预紧用螺栓组受力f
bolt
,
[0376]
f
bolt
=(|u
a
| |u
b
| h
sp
‑
g
n
)
·
k
sp
f
pre0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(42)
[0377]
式中:
[0378]
g
n
——螺母a和螺母b之间的初始间隙;
[0379]
f
bolt
——预紧用螺栓组受力;
[0380]
h
sp
——预紧零件的厚度;
[0381]
k
sp
——预紧零件的刚度;
[0382]
f
pre0
——双螺母初始预紧力;
[0383]
u
a
——螺母a的弹性位移;
[0384]
u
b
——螺母b的弹性位移。
[0385]
进一步的,计算在外载荷作用下,两个螺母所受到的实际预紧力的方法,包括以下步骤:
[0386]
s81:按下式(43)计算在螺母负载f
n
作用下,弹簧系统中节点所受到的外载荷f
node
,
[0387][0388]
其中,
[0389]
f
node
——弹簧系统中节点所受到的外载荷;
[0390]
n
node
——系统节点的总数;
[0391]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0392]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0393]
n
nae
——螺母a中弹簧单元的数量;
[0394]
s82:建立如下式(44)的非线性方程组,
[0395][0396]
其中,
[0397]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0398]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0399]
f
node
——弹簧系统中节点所受到的外载荷;
[0400]
f
bolt
——预紧用螺栓组受力;
[0401]
f
sp
——预紧零件的受力;
[0402]
k
nrj
——螺母和滚柱之间接触单元的刚度;
[0403]
k
srj
——丝杠和滚柱之间接触单元的刚度;
[0404]
f
n
——双螺母行星滚柱丝杠所受的外部负载;
[0405]
f
prea
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母a的预紧力;
[0406]
f
preb
——双螺母行星滚柱丝杠在螺母负载f
n
作用下,螺母b的预紧力;
[0407]
h
sp
——预紧零件的厚度;
[0408]
k
sp
——预紧零件的刚度;
[0409]
u
a
——螺母a的弹性位移;
[0410]
u
b
——螺母b的弹性位移;
[0411]
s83:令f
prea
和f
preb
的初值分别为f
pre0
和f
pre0
f
n
,按下式(45)计算f
nrj
的初值,按下式(46)计算f
srj
的初值,
[0412][0413][0414]
其中,
[0415]
f
pre0
——双螺母初始预紧力;
[0416]
n
roller
——单个螺母内滚柱的数量;
[0417]
n
t
——滚柱的螺纹牙的数量;
[0418]
f
n
——双螺母行星滚柱丝杠所受的外部负载;
[0419]
f
nrj
——螺母和滚柱之间接触单元的受力;
[0420]
f
srj
——丝杠和滚柱之间接触单元的受力;
[0421]
将上述初值代入非线性方程组,求取在外载荷作用下,两个螺母所受到的实际预紧力f
prea
和f
preb
。
[0422]
实施例1
[0423]
某一双螺母行星滚柱丝杠的结构参数如表1所示:在螺母a和螺母b内各安装有7个滚柱,且每个滚柱上的螺纹牙数量为n
t
=17。丝杠、滚柱和螺母材料的弹性模量选用210gpa,泊松比为0.3,双螺母之间的间隙为5mm。该双螺母行星滚柱丝杠所受到的外部负载为f
n
=10000n。为了保证传动间隙始终为零,该双螺母行星滚柱丝杠在承受负载时,要求螺母a和螺母b的预紧力始终大于300n。如何选设计紧元件材料、预紧零件尺寸、螺母所受初始预紧力和预紧螺栓组受力?使得,在外部负载作用下该双螺母行星滚柱丝杠的传动间隙始终为零。
[0424]
表1双螺母行星滚柱丝杠的结构参数
[0425][0426]
s1:根据双螺母行星滚柱丝杠结构特征,完成系统离散,计算系统伴随矩阵a。
[0427][0428]
式中:
[0429][0430][0431]
式中:
[0432][0433][0434][0435]
矩阵c
nra
、c
nrb
、c
sra
和c
srb
中的非零元素分别为:
[0436]
c
nra
(m,m)=1
[0437]
c
nra
(m,34 35 1 2m)=
‑1[0438]
c
nrb
(m,m 17)=
‑1[0439]
c
nrb
(m,34 35 1 34 2m
‑
1)=1
[0440]
c
sra
(m,m 34 1)=
‑1[0441]
c
sra
(m,34 35 1 2m
‑
1)=1
[0442]
c
srb
(m,m 34 18 1)=1
[0443]
c
srb
(m,34 35 1 34 2m)=
‑1[0444]
式中:m——m=1,2,
…
,17,滚柱上的螺纹牙编号。
[0445]
s2:给定双螺母初始预紧力:f
pre0
=3000n。
[0446]
s3:计算仅受预紧力时,两个螺母的弹性位移u
a
和u
b
:
[0447]
u
a
=0.0032mm
[0448]
u
b
=
‑
0.0039mm
[0449]
s4:给定预紧零件材料类型和几何尺寸,并计算其刚度。选用预紧零件材料为40cr,弹性模量为:
[0450]
e
sp
=206gpa
[0451]
预紧零件厚度为:
[0452]
h
sp
=4.993mm
[0453]
预紧零件内径和外径分别为:
[0454]
d
sp_in
=36mm
[0455]
r
sp_out
=40mm
[0456]
计算预紧零件的刚度为:
[0457]
k
sp
=9.8507
×
106n/mm
[0458]
s5:计算预紧用螺栓组受力:f
bolt
=4003.5n。
[0459]
s6:选择预紧螺栓规格为m6,强度等级为12.9,螺栓数量为6个。
[0460]
s7:查阅《机械设计手册》可知,m6螺栓小径为4.918mm。每个预紧螺栓承受的拉应力为:350.9806mpa。查表可知12.9级螺栓的屈服极限为1080mpa。该预紧螺栓组的安全系数为:3.0857。满足强度要求,可进行下一步计算。
[0461]
s8:计算在外载荷作用下,两个螺母所受到的实际预紧力为:
[0462]
f
prea
=739.4n
[0463]
f
preb
=10739.4n
[0464]
s9:由于f
prea
>300n成立,所以设计满足要求,进行下一步。
[0465]
s10:为了达到设计要求,该双螺母行星滚柱丝杠的初始预紧力为3000n、预紧零件材料为40cr,弹性模量为206gpa、预紧零件为空心圆环,其厚度为4.993mm,内径为36mm,外径为40mm,预紧螺栓规格为m6,强度等级12.9,螺栓组数量为6。
[0466]
以上公开的仅为本发明的较佳具体实施例,但是,本发明实施例并非局限于此,任何本领域技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。