1.本发明涉及自动化设备技术领域,具体为一种间隔套自动供料装置。
背景技术:
2.安全钳是电梯的安全保护装置;电梯安全钳装置是在限速器的操纵下,当电梯速度超过电梯限速器设定的限制速度,或在悬挂绳发生断裂和松弛的情况下,将轿厢紧急制停并夹持在导轨上的一种安全装置;它对电梯的安全运行提供有效的保护作用,一般将其安装在轿厢架或对重架上,安全钳分为单向安全钳和双向安全钳,安全钳内部常常需要使用到隔套或垫片组件;目前在安全钳自动化物料输送流水线中,运用倍速链作为运输方式是自动化物料输送流水线中比较高效、常用的一种自流式的生产输送线方式,一般会将工装板放在倍速链上进行配合使用;
3.在中国专利申请cn112658663a提出“自动变速器复位弹簧组件自动生产线”,包括转盘、若干压瓶机构、松瓶机构、上瓶机构以及下瓶机构;上瓶机构把空瓶送到转盘中,压瓶机构对瓶体进行压紧定位;松瓶机构能够解除压瓶机构对瓶体的压紧定位,从而方便下瓶机构把装有物料的瓶体送出转盘;本发明中,压瓶机构能够对瓶体的开口边缘进行压紧定位,使转盘转动过程中瓶体不会由于震动而出现位置偏移,进而使加料口准确地向瓶体灌装物料,同时也避免瓶体破裂;松瓶机构能够使压瓶机构解除对瓶体的压紧定位,使上瓶机构能够把空瓶体往转盘上推送,使下瓶机构能够把装有物料的瓶体从转盘上拉出,进而提高了灌装效率;
4.在中国发明专利cn107486695b提出“用于安装柴油机气缸盖隔套螺母的自动装配机及装配方法”,该装置包括工作台、能前后传送柴油机气缸盖的传送装置,传送装置中间段在工作台的上方跨过,在传送装置右侧的工作台上固定装有储料机构和自动上料机构,自动上料机构在储料机构正前方,传送装置中间段的上方是自动安装机构,通过储料机构的储料单元实现气缸盖隔套螺母的储存,通过旋转转盘的设置实现气缸盖隔套螺母在装配过程中的不间断供料,通过自动上料和自动安装机构实现气缸盖隔套螺母的移动和拧紧操作,实现了生产线上柴油机气缸盖隔套螺母的自动化装配,提高了自动化程度,减少了人工对生产过程的干扰;
5.本技术在现有技术的基础上,不仅仅提高了物料的运输效率,同时增强了设备的储料容量,降低工作人员的摆放频次,且能够精准检测物料厚度尺寸,对于不同厚度尺寸的物料,仅需更换一块搓料板,即可正常使用,有效增强了设备的兼容性;
6.为此,我们提出一种间隔套自动供料装置。
技术实现要素:
7.本发明为解决上述技术问题,提供一种间隔套自动供料装置。
8.为实现上述目的,本发明提供如下技术方案:
9.一种间隔套自动供料装置,包括罩体,所述罩体内设有驱动机构,所述驱动机构的
输出端贯穿所述罩体并连接有可旋转的转动盘;位于所述转动盘的上方且在所述罩体上固定有料盘本体,所述料盘本体内周向安装有若干中空的间隔套套筒;位于所述转动盘的下方且在所述罩体上设有可水平移动的搓料盘,所述搓料盘的下方设有可水平移动的接料机构,所述接料机构安装在运输机构上;靠近所述运输机构设置有对所述接料机构进行检测的检测机构。
10.本装置中,工作人员将待加工的物料放入料盘本体中,通过驱动机构带动转动盘进行转动,当转动盘旋转到一定位置时,物料落入搓料盘中,并通过搓料盘将其运输至接料机构上,并通过检测机构进行厚度检测,检测完毕且合格后,通过运输机构将其运输至取料机器人处,进行后续加工;该设备在增强储料量的同时,能够有效度加工物料进行检测,自动化程度较高,且适用范围更广,极大的降低了工作人员的劳动效率。
11.优选的,所述罩体内设有至少两条滑轨,所述滑轨上连接有电动滑块,所述电动滑块与所述搓料盘之间通过连接件螺纹连接;所述罩体上开设有供所述搓料盘移动的缺口。
12.通过设置滑轨和电动滑块,使得电动滑块能够在滑轨上进行往复移动,且电动滑块上是螺纹连接有连接件,连接件的一侧螺纹连接有搓料盘,使得电动滑块能够带动搓料盘进行移动,且由于搓料盘是螺接在连接件上的,后期方便工作人员更换不同搓料口的盘体,有效增强了设备的兼容性。
13.优选的,所述驱动机构包括设置在所述罩体下端面的伺服电机,所述伺服电机上设有减速机,所述减速机的一端延伸至所述罩体内并连接有轮体一,靠近所述轮体一且位于所述罩体内设有轮体二,所述轮体二与所述轮体一之间设有同步带;所述轮体二的上端面连接有传动杆,所述传动杆轴向的一端贯穿所述罩体的上端面并连接有转动盘。
14.其中通过伺服电机和减速机的配合,能够有效控制轮体一的转动精度,且通过轮体一、轮体二和同步带的配合,能够带动传动杆进行周向旋转,从而通过传动杆带动转动盘进行周向旋转;使其转动盘上的料孔一与间隔套套筒的孔径完成错位或共轴心的作用,方便料盘本体进行储料或进行防料。
15.优选的,所述转动盘上周向开设有若干料孔一,所述料孔一与所述间隔套套筒的孔径一致。
16.通过设置料孔一,方便物料从间隔套套筒中掉落至搓料盘中,从而方便搓料盘将物料运转至接料板上。
17.优选的,所述料盘本体包括下盘体与上盘体,所述下盘体与所述上盘体之间通过若干支撑杆进行连接,所述下盘体与所述上盘体之间周向等距设有相互连通的所述间隔套套筒;所述下盘体通过紧固件固定在所述罩体上且位于所述转动盘的上方并保持间隙;所述上盘体上周向开设有若干上料口。
18.其中下盘体与上盘体之间设置有四个支撑杆用于支撑上、下盘体,并在上、下盘体之间等距周向设置八个间隔套套筒,且上、下盘体与间隔套套筒之间相互连通,工作人员可通过上盘体的上料口将物料置入间隔套套筒内,当转动盘的料孔一与上料口共轴时,物料便可从间隔套套筒内掉落至搓料盘中。
19.优选的,所述检测机构包括架体,所述架体上设有可升降的接触式位移传感器;所述接触式位移传感器位于所述接料机构的上方。
20.其中架体的正面安装有升降气缸,升降气缸的伸缩端连接有控制板,控制板的正
面设有接触式位移传感器,当接料板上承载有物料时,气缸一带动接料板移动至检测机构的下方,升降气缸带动控制板向下移动,并通过接触式位于传感器对物料厚度进行精准检测。
21.优选的,所述接料机构包括设置在所述搓料盘下方的接料板,所述接料板上分别开设有顶升孔和接料口;所述接料板的下端面固定在可水平移动的气缸一上,所述气缸一连接在所述运输机构上;所述搓料盘上开设有搓料口,所述搓料口上开设有与所述顶升孔配合的缺口。
22.其中接料口用于与搓料盘上的搓料口配合,用于承载物料;而顶升孔则与搓料盘上的搓料口以及缺口进行配合;搓料口的外周开设有三个缺口,使其形成一个圆孔带有三个缺口的形状,方便与顶升气缸带动顶升杆向上顶升,防止物料的坠落,同时也可对物料进行退回。
23.优选的,所述运输机构包括可水平移动的气缸二,所述气缸二的上端面通过板体连接有所述接料机构。
24.通过设置可水平移动的气缸二,使得通过板体,能够带动整个接料机构进行水平移动,从而方便下一道工序的展开。
25.优选的,靠近所述气缸二且在所述罩体内设有顶升气缸,所述顶升气缸的伸缩端连接有顶升杆,所述顶升杆的一端可贯穿所述接料机构和所述搓料盘并延伸至外部。
26.通过设置了顶升气缸和顶升杆,避免物料进行垂直下落的情况出现。
27.优选的,所述自动供料装置的操作方法,包括以下步骤:
28.s1、控制所述驱动机构带动所述转动盘进行转动,使其所述料孔一与所述间隔套套筒的孔径进行错位;
29.s2、依次将待加工物料,通过所述上料口装入所述间隔套套筒内,当装配完毕后,重新控制所述驱动机构带动所述转动盘进行旋转,使得所述料孔一与所述间隔套套筒位移同一轴心;
30.s3、物料通过所述料孔一落入所述搓料盘上,通过所述电动滑块,将所述搓料盘移动到所述接料板的上方,此时,物料落入所述接料口内,所述搓料盘回位,所述气缸一带动所述接料盘移动至所述检测机构下方,通过所述接触式位移传感器检测物料厚度;
31.s4、检测厚度合格的,则通过所述运输机构带动整个所述接料机构进行水平移动,并由取料机器人进行取料,进行后续加工,反之,则通过取料机器人进行去除。
32.与现有技术相比,本发明的有益效果如下:
33.1、本发明与现有技术相比,采用多个间隔套套筒,可以一次存放多个物料,增大了设备的储料容量,减少人工摆料频次;2、本发明与现有技术相比,通过检测机构,能够准确测量物料的厚度尺寸,提高设备的测量精度;3、本发明与现有技术相比,兼容性更好,对于不同厚度尺寸的物料,工作人员只需更换一块搓料板即可,有效增强了设备的利用效率。
附图说明
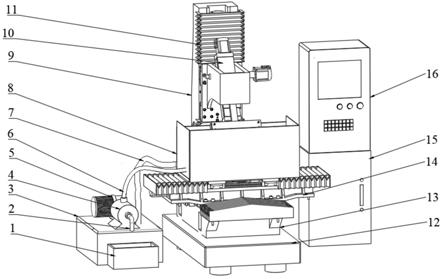
34.图1为本发明整体结构示意图;
35.图2为本发明中料盘本体结构示意图;
36.图3为本发明中转动盘结构示意图;
37.图4为本发明中检测机构、接料机构和运输机构配合示意图;
38.图5为本发明中顶升气缸、搓料盘和接料盘展开示意图;
39.图6为本发明中罩体与搓料盘装配示意图;
40.图7为本发明中驱动机构内部结构示意图。
41.图中:1、罩体;11、滑轨;12、电动滑块;13、连接件;14、搓料盘;141、搓料口;142、缺口;2、驱动机构;21、伺服电机;22、减速机;23、轮体一;24、轮体二;25、传动杆;26、同步带;3、转动盘;31、料孔一;4、料盘本体;41、下盘体;42、上盘体;421、上料口;5、间隔套套筒;6、检测机构;61、架体;62、接触式位移传感器;7、接料机构;71、接料板;72、顶升孔;73、接料口;74、气缸一;8、运输机构;81、气缸二;9、顶升气缸;91、顶升杆。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.实施例一
44.请参阅图1、图2、图3、图4和图7,一种间隔套自动供料装置,包括罩体1,罩体1内设有驱动机构2,驱动机构2的输出端贯穿罩体1并连接有可旋转的转动盘3;位于转动盘3的上方且在罩体1上固定有料盘本体4,料盘本体4内周向安装有若干中空的间隔套套筒5;位于转动盘3的下方且在罩体1上设有可水平移动的搓料盘14,搓料盘14的下方设有可水平移动的接料机构7,接料机构7安装在运输机构8上;靠近运输机构8设置有对接料机构7进行检测的检测机构6。
45.工作人员控制伺服电机21和减速机22进行运转,并通过轮体一23、同步带26和轮体二24进行转动,通过轮体二24带动传动杆25进行旋转,通过传动杆25带动转动盘3进行周向旋转,由于料盘本体4是固定在罩体1上的,当转动盘3进行旋转时,其料孔一31与下盘体41的料口发生错位,此时,工作人员依次将物料放入八个间隔套套筒5中,当八个间隔套套筒5内部装填完毕后,驱动机构2进行转动,带动转动盘3的料孔一31与上料口421位于同一轴线,物料由间隔套套筒5掉落至搓料盘14上,通过搓料盘14移动到接料板71上方,且搓料口141与接料口73共轴时,物料掉落至接料板71上,由气缸一74带动接料板71水平移动至检测机构6的下方,通过检测机构6上的接触式位移传感器62进行检测,当检测合格后,则由运输机构8中的气缸二81带动整个接料机构7移动至取料机器人处,由取料机器人将其转移至下一道工序,若检测厚度不合格,则由取料机器人将其去除,并重新进行上料;该设备在增强储料量的同时,能够有效度加工物料进行检测,自动化程度较高,且适用范围更广,极大的降低了工作人员的劳动效率。
46.优选的,驱动机构2包括设置在罩体1下端面的伺服电机21,伺服电机21上设有减速机22,减速机22的一端延伸至罩体1内并连接有轮体一23,靠近轮体一23且位于罩体1内设有轮体二24,轮体二24与轮体一23之间设有同步带26;轮体二24的上端面连接有传动杆25,传动杆25轴向的一端贯穿罩体1的上端面并连接有转动盘3。
47.其中通过伺服电机21和减速机22的配合,能够有效控制轮体一23的转动精度,且
通过轮体一23、轮体二24和同步带26的配合,能够带动传动杆25进行周向旋转,从而通过传动杆25带动转动盘3进行周向旋转;使其转动盘3上的料孔一31与间隔套套筒5的孔径完成错位或共轴心的作用,方便料盘本体4进行储料或进行防料。
48.优选的,转动盘3上周向开设有若干料孔一31,料孔一31与间隔套套筒5的孔径一致。
49.通过设置料孔一31,方便物料从间隔套套筒5中掉落至搓料盘14中,从而方便搓料盘14将物料运转至接料板71上。
50.优选的,料盘本体4包括下盘体41与上盘体42,下盘体41与上盘体42之间通过若干支撑杆进行连接,下盘体41与上盘体42之间周向等距设有相互连通的间隔套套筒5;下盘体41通过紧固件固定在罩体1上且位于转动盘3的上方并保持间隙;上盘体42上周向开设有若干上料口421。
51.其中下盘体41与上盘体42之间设置有四个支撑杆用于支撑上、下盘体41,并在上、下盘体41之间等距周向设置八个间隔套套筒5,且上、下盘体41与间隔套套筒5之间相互连通,工作人员可通过上盘体42的上料口421将物料置入间隔套套筒5内,当转动盘3的料孔一31与上料口421共轴时,物料便可从间隔套套筒5内掉落至搓料盘14中。
52.优选的,检测机构6包括架体61,架体61上设有可升降的接触式位移传感器62;接触式位移传感器62位于接料机构7的上方。
53.其中架体61的正面安装有升降气缸,升降气缸的伸缩端连接有控制板,控制板的正面设有接触式位移传感器62,当接料板71上承载有物料时,气缸一74带动接料板71移动至检测机构6的下方,升降气缸带动控制板向下移动,并通过接触式位于传感器对物料厚度进行精准检测。
54.优选的,运输机构8包括可水平移动的气缸二81,气缸二81的上端面通过板体连接有接料机构7。
55.通过设置可水平移动的气缸二81,使得通过板体,能够带动整个接料机构进行水平移动,从而方便下一道工序的展开。
56.实施例二
57.本实施例在实施例一的基础上:一种间隔套自动供料装置的操作方法,包括以下步骤:
58.s1、控制驱动机构2带动转动盘3进行转动,使其料孔一31与间隔套套筒5的孔径进行错位;
59.s2、依次将待加工物料,通过上料口421装入间隔套套筒5内,当装配完毕后,重新控制驱动机构2带动转动盘3进行旋转,使得料孔一31与间隔套套筒5位移同一轴心;
60.s3、物料通过料孔一31落入搓料盘14上,通过电动滑块12,将搓料盘14移动到接料板71的上方,此时,物料落入接料口73内,搓料盘14回位,气缸一74带动接料盘移动至检测机构6下方,通过接触式位移传感器62检测物料厚度;
61.s4、检测厚度合格的,则通过运输机构8带动整个接料机构7进行水平移动,并由取料机器人进行取料,进行后续加工,反之,则通过取料机器人进行去除。
62.实施例三
63.请参阅图5,优选的,接料机构7包括设置在搓料盘14下方的接料板71,接料板71上
分别开设有顶升孔72和接料口73;接料板71的下端面固定在可水平移动的气缸一74上,气缸一74连接在运输机构8上;搓料盘14上开设有搓料口141,搓料口141上开设有与顶升孔72配合的缺口142;
64.搓料盘14上对称开设有若干螺孔,通过螺栓与连接件13的配合,装配在电动滑块12上,后期工作人员若要更换不同厚度尺寸的物料,只需拆卸掉搓料盘14,并重新螺纹连接相应尺寸的盘体,便可加工不同厚度尺寸的物料,有效增强了该设备的兼容性,降低了企业的生产成本;其次搓料盘14上开设有圆形的通孔,并在圆形通孔的边上等距设有三个缺口142,使其形成一个圆孔带有三个缺口142的形状,主要是为了方便与顶升气缸9上的顶升杆91配,方便顶升杆91延伸至通孔内,一定程度上起到顶升物料,避免物料垂直下落的情况出现;且在接料板71上分别开设有接料口73和顶升孔72,其中接料口73主要用于与搓料口141进行配合,而顶升孔72则是为了方便顶升杆91贯穿接料板71和搓料盘14,起到了顶升物料的效果,防止物料的坠落,同时也可对物料进行退回。
65.实施例四
66.请参阅图6,优选的,罩体1内设有至少两条滑轨11,滑轨11上连接有电动滑块12,电动滑块12与搓料盘14之间通过连接件13螺纹连接;罩体1上开设有供搓料盘14移动的缺口142。
67.其中两条滑轨11设置在罩体1的内顶面,在其滑轨11上设有可滑动的电动滑块12,电动滑块12通过连接件13,螺纹连接有搓料盘14,使其电动滑块12在滑轨11上移动时,能够带动搓料盘14进行同步移动,从而使得物料能够转移至接料板71上;且由于搓料盘14是螺接在连接件13上的,搓料盘14上对称开设有若干螺孔,通过螺栓与连接件13的配合,装配在电动滑块12上,后期工作人员若要更换不同厚度尺寸的物料,只需拆卸掉搓料盘14,并重新螺纹连接相应尺寸的盘体,便可加工不同厚度尺寸的物料,有效增强了该设备的兼容性,降低了企业的生产成本;后期方便工作人员更换不同搓料口141的盘体,有效增强了设备的兼容性。
68.实施例五
69.本实施例在实施例一的基础上,优选的,靠近气缸二81且在罩体1内设有顶升气缸9,顶升气缸9的伸缩端连接有顶升杆91,顶升杆91的一端可贯穿接料机构7和搓料盘14并延伸至外部;通过设置了顶升气缸9和顶升杆91,避免物料进行垂直下落的情况出现。
70.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。