技术特征:
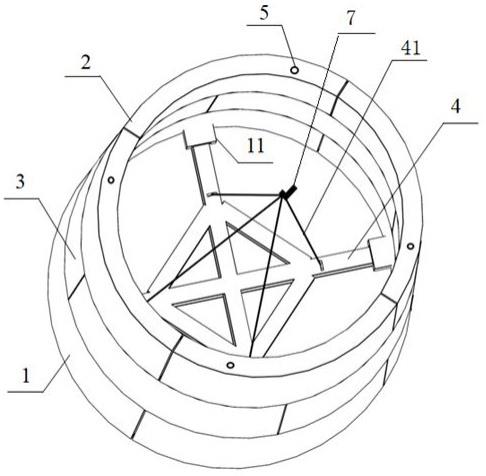
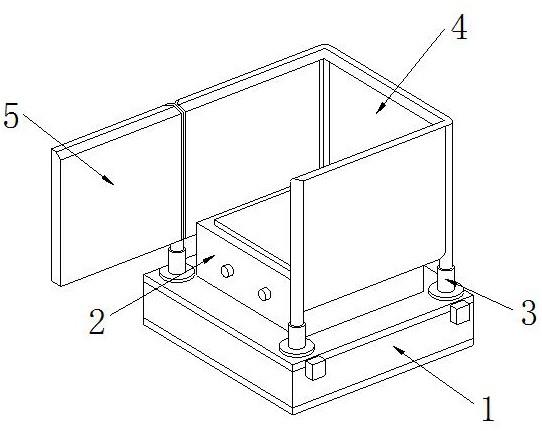
1.一种机器人用多功能自适应夹具,其特征在于,包括:机械臂(1);连接柱(2),设置在所述机械臂(1)的自由端;夹取机构(3),设置在所述连接柱(2)的底端;所述的夹取机构(3)包括:顶柱(31),与所述连接柱(2)的底端固定连接;支撑柱(32),固定设置在所述顶柱(31)水平方向上的一端;第一侧柱(33),固定设置在所述支撑柱(32)的内侧面;第二侧柱(35),通过翻转组件(34)与支撑柱(32)的底端可翻转固定;吸取组件(36),分别布置在顶柱(31)、第一侧柱(33)和第二侧柱(35)的内侧面。2.根据权利要求1所述的机器人用多功能自适应夹具,其特征在于,所述支撑柱(32)的形状为“7”字形,支撑柱(32)的横杆和竖杆之间设有支撑板(37)。3.根据权利要求1所述的机器人用多功能自适应夹具,其特征在于,所述夹取机构(3)在夹取状态下,第一侧柱(33)与第二侧柱(35)内侧面上的吸取组件位于同一面上。4.根据权利要求1所述的机器人用多功能自适应夹具,其特征在于,支撑柱(32)的底端开设有凹槽(4),且凹槽(4)的内腔一侧设有通孔,所述翻转组件(34)包括:伺服电机(341),固定设置在所述凹槽(4)带通孔的一侧外壁,且伺服电机(341)与机械臂(1)的外部控制系统电性连接;所述伺服电机(341)的输出端通过通孔延伸进所述凹槽(4)的内腔并通过联轴器锁紧转轴(342)的一端,所述转轴(342)的另一端通过轴承安装在所述凹槽(4)的内壁;圆形柱(343),固定设置在所述转轴(342)的外壁上;连接板(344),一端与圆形柱(343)的外壁固定,另一端与第二侧柱(35)的顶端固定连接。5.根据权利要求4所述的机器人用多功能自适应夹具,其特征在于,所述的连接板(344)设有两块。6.根据权利要求1所述的机器人用多功能自适应夹具,其特征在于,所述的吸取组件(36)包括:真空分流器(361)、压缩空气连接管(364)和偏平吸盘(367);所述的真空分流器(361)分别固设在顶柱(31)、第一侧柱(33)和第二侧柱(35)的内部;真空分流器(361)的进气管(362)与真空发生器(362)连接,每个真空分流器(361)对应一个压缩空气连接管(364),所述压缩空气连接管(364)的一端与所述真空发生器(362)的压缩空气进气口螺接,三个压缩空气连接管(364)的另一端分别延伸出所述顶柱(31)、第一侧柱(33)和第二侧柱(35)的外壁并通过电磁阀与压缩空气的接入口连接,且电磁阀与机械臂(1)的外部控制系统电性连接;所述扁平吸盘(367)通过连接管(366)与真空分流器(361)的内腔连通。7.根据权利要求6所述的机器人用多功能自适应夹具,其特征在于,所述吸取组件(36)还包括中空的固定柱(365),所述固定柱(365)的数量为若干个,若干个固定柱(365)固定设置在所述真空分流器(361)的一侧,且固定柱(365)与真空分流器(361)的内腔相通;所述的连接管(366)螺接在固定柱(365)内部。8.根据权利要求6所述的机器人用多功能自适应夹具,其特征在于,所述连接管(366)在与扁平吸盘(367)固定的出口端设有过滤网(368)。
9.根据权利要求8所述的机器人用多功能自适应夹具,其特征在于:所述连接管(366)的截面形状为倒“t”字形。
技术总结
本发明公开了一种机器人用多功能自适应夹具,包括:机械臂;连接柱,设置在所述机械臂的自由端;夹取机构,设置在所述连接柱的底端;所述的夹取机构包括:顶柱,与所述连接柱的底端固定连接;支撑柱,固定设置在所述顶柱的一端;第一侧柱,固定设置在所述支撑柱的内侧面;第二侧柱,通过翻转组件与支撑柱的底端可翻转固定;吸取组件,分别布置在顶柱、第一侧柱和第二侧柱的内侧面。本发明通过采用若干个扁平吸盘对箱体的表面进行吸附,吸附力更强,且当遇到箱体不平时也能对其进行吸附,以使箱体不易掉落。掉落。掉落。
技术研发人员:徐琦 孙顺凯 王文娟 石钉科 沈学 钱杰 丁男哲 刘静杰 崔浩波 李国瑞
受保护的技术使用者:浙江中烟工业有限责任公司
技术研发日:2021.07.27
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。