1.本发明属于光电芯片领域,更具体地,涉及一种基于自适应工作频率的光学参数控制方法及系统。
背景技术:
2.片上光子器件具有传输带宽高、传输损耗小以及易于大规模集成等诸多优点,广泛用于光通信、光探测以及光计算等领域。为了防止光子器件的光学参数由于温度变化、制造工艺偏差以及输入激光变化等影响而发生改变,通常会引入闭环反馈控制系统对其光学参数进行检测及调节控制。
3.现有闭环反馈控制系统所采用的控制算法大都采用固定工作频率,以固定工作频率所限定的频次对光子器件的光学参数进行控制。当每次控制单元输出的变化值一定时,高工作频率将带来更快的锁定速度,能够快速找到锁定点以及补偿变化更迅速的热变化,但是高于热光效应响应速度后,会产生明显抖动,从而降低锁定精度;低工作频率能够避免高于热光效应响应速度,从而减少输出的抖动,但会导致锁定速度降低以及难以补偿快速变化的热变化。因此,传统固定工作频率的控制算法存在控制速度和控制精度之间的折衷。现有技术中,通常通过手动调节的方式确定合适的工作频率,从而避免过快或者过慢的工作频率,但是手动调节的方式需要消耗过多的调节时间,难以用于大规模应用中。此外,由于难以保证手动调节的工作频率能够合适的匹配热光效应的响应带宽,因此难以在不产生大抖动的前提下实现最高的锁定速度。
技术实现要素:
4.针对现有技术的缺陷和改进需求,本发明提供了一种基于自适应工作频率的光学参数控制方法及系统,其目的在于同时自适应地实现高锁定精度和高锁定速度,并解决手动调节耗时长、难以确定最合适工作频率的问题。
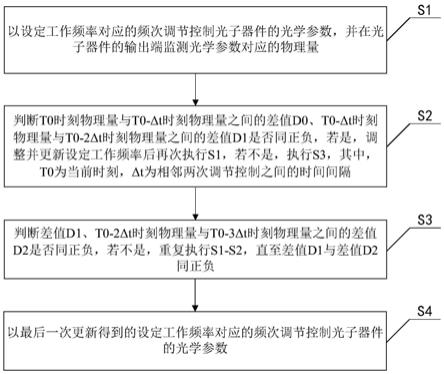
5.为实现上述目的,按照本发明的一个方面,提供了一种基于自适应工作频率的光学参数控制方法,包括:s1,以设定工作频率对应的频次调节控制光子器件的光学参数,并在所述光子器件的输出端监测所述光学参数对应的物理量;s2,判断t0时刻物理量与t0
‑
δt时刻物理量之间的差值d0、t0
‑
δt时刻物理量与t0
‑
2δt时刻物理量之间的差值d1是否同正负,若是,调整并更新所述设定工作频率后再次执行所述s1,若不是,执行s3,其中,t0为当前时刻,δt为相邻两次调节控制之间的时间间隔;s3,判断所述差值d1、t0
‑
2δt时刻物理量与t0
‑
3δt时刻物理量之间的差值d2是否同正负,若不是,重复执行所述s1
‑
s2,直至所述差值d1与所述差值d2同正负;s4,以最后一次更新得到的设定工作频率对应的频次调节控制所述光子器件的光学参数。
6.更进一步地,所述s4之后还包括:在所述光子器件的输出端实时监测所述光学参数对应的物理量;当所述物理量的抖动幅度大于抖动幅度阈值时,降低所述设定工作频率的值;当所述物理量的上升幅度大于上升幅度阈值或者下降幅度小于下降幅度阈值时,提
高所述设定工作频率的值。
7.更进一步地,所述调节控制所述光子器件的光学参数包括:若差值d0大于0且t0
‑
δt时刻控制输出值增加,或者若差值d0不大于0且t0
‑
δt时刻调节控制所述输出值减小时,t0时刻控制所述输出值增加,否则,t0时刻控制所述输出值减小。
8.更进一步地,所述调节控制所述光子器件的光学参数包括:若差值d0小于0且t0
‑
δt时刻控制输出值增加,或者若差值d0不小于0且t0
‑
δt时刻调节控制所述输出值减小时,t0时刻控制所述输出值增加,否则,t0时刻控制所述输出值减小。
9.更进一步地,所述s2中调整并更新所述设定工作频率包括:根据预设的工作频率调整间隔调整并更新所述设定工作频率。
10.更进一步地,所述光子器件为环形谐振器,所述光学参数为谐振波长,所述物理量为电压或电流。
11.更进一步地,所述光子器件为马赫曾德尔干涉仪,所述光学参数为偏压点,所述物理量为电压或电流。
12.更进一步地,所述光子器件为单个光子器件或光子器件阵列,当所述光子器件为光子器件阵列时,还包括:重复执行所述s1
‑
s4,以逐个调节控制所述光子器件阵列中各光子器件的光学参数。
13.按照本发明的一个方面,提供了一种基于自适应工作频率的光学参数控制系统,包括:监测模块,用于以设定工作频率对应的频次调节控制光子器件的光学参数,并在所述光子器件的输出端监测所述光学参数对应的物理量;更新模块,用于判断t0时刻物理量与t0
‑
δt时刻物理量之间的差值d0、t0
‑
δt时刻物理量与t0
‑
2δt时刻物理量之间的差值d1是否同正负,若是,调整并更新所述设定工作频率后再次执行所述监测模块,若不是,执行重复执行模块,其中,t0为当前时刻,δt为相邻两次调节控制之间的时间间隔;重复执行模块,用于判断所述差值d1、t0
‑
2δt时刻物理量与t0
‑
3δt时刻物理量之间的差值d2是否同正负,若不是,重复执行所述监测模块和更新模块,直至所述差值d1与所述差值d2同正负;控制模块,用于以最后一次更新得到的设定工作频率对应的频次调节控制所述光子器件的光学参数。
14.更进一步地,还包括:实时监测控制模块,用于在所述控制模块执行完成之后,在所述光子器件的输出端实时监测所述光学参数对应的物理量;当所述物理量的抖动幅度大于抖动幅度阈值时,降低所述设定工作频率的值;当所述物理量的上升幅度大于上升幅度阈值或者下降幅度小于下降幅度阈值时,提高所述设定工作频率的值。
15.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
16.(1)能够自动确定控制光学参数的工作频率,并基于该工作频率所限定的频次去调节光子器件的光学参数,解决了手动调节工作频率耗时长、难以确定最合适工作频率的问题,同时实现自适应的高锁定精度和高锁定速度,适合大规模应用;对于现有光学参数控制算法而言,无需增加复杂的计算单元便可自适应调节其工作频率,具有硬件开销小的优点;
17.(2)为设定工作频率确定一个最优值之后,实时监测光学参数对应物理量的抖动幅度、上升幅度、下降幅度是否在相应的幅度阈值内,并在任一幅度不在相应的幅度阈值内时,实时调高或降低设定工作频率的值,保证光学参数的调节频次始终处于最优状态,且这
种用于实时监测模式下的调节方式简单且准确,不会占用过多的计算资源;
18.(3)采用最值锁定算法控制光子器件的光学参数,能够有效地补偿工艺偏差、热波动以及输入激光变化带来的光学参数的变化,并且消耗硬件资源更少。
附图说明
19.图1为本发明实施例提供的基于自适应工作频率的光学参数控制方法的流程图;
20.图2为本发明一实施例提供的用于光学参数锁定的最大值锁定算法;
21.图3为本发明另一实施例提供的用于光学参数锁定的最小值锁定算法;
22.图4为本发明实施例提供的用于光子器件的光学参数的闭环锁定环路原理图;
23.图5为本发明实施例提供的用于环形谐振器谐振波长锁定的控制原理示意图;
24.图6为本发明实施例提供的用于马赫曾德尔干涉仪偏压点锁定的控制原理示意图;
25.图7为本发明实施例提供的用于环形谐振器阵列谐振波长锁定的控制原理示意图;
26.图8为本发明实施例提供的用于马赫曾德尔干涉仪阵列偏压点锁定的控制原理示意图;
27.图9为本发明实施例提供的基于自适应工作频率的光学参数控制系统的框图。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
29.在本发明中,本发明及附图中的术语“第一”、“第二”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
30.图1为本发明实施例提供的基于自适应工作频率的光学参数控制方法的流程图。参阅图1,结合图2
‑
图8,对本实施例中基于自适应工作频率的光学参数控制方法(以下简称为光学参数控制方法)进行详细说明,方法包括操作s1
‑
操作s4。
31.操作s1,以设定工作频率对应的频次调节控制光子器件的光学参数,并在光子器件的输出端监测光学参数对应的物理量。
32.以图4所示闭环反馈控制系统为例说明光学参数控制方法的应用场景。闭环反馈控制系统由光子器件、监控单元、控制算法单元以及调谐单元组成。监控单元、控制算法单元和调谐单元用于执行本实施例中光学参数控制方法,其过程为:监控单元检测光子器件的光学参数对应的物理量,控制算法单元计算出合适的输出值给调谐单元,调谐单元根据该输出值对光子器件的光学参数进行调节。输出值例如用于控制输入至光子器件中的电压信号,当输入至光子器件中的电压信号发生改变时,光子器件的光学参数也被改变,二者的改变趋势既有可能是相同的,也有可能是相反的,例如控制电压信号增加时,对于不同的光子器件,其光学参数有可能增加,也有可能减小。
33.操作s1中的设定工作频率例如为一任意给定的初始工作频率。光子器件例如为环
形谐振器或马赫曾德尔干涉仪等。当光子器件为环形谐振器时,光学参数控制方法调节的光学参数为环形谐振器的谐振波长,相应的物理量为电压或电流。当光子器件为马赫曾德尔干涉仪时,光学参数控制方法调节的光学参数为马赫曾德尔干涉仪的偏压点,相应的物理量为电压或电流。
34.操作s2,判断t0时刻物理量与t0
‑
δt时刻物理量之间的差值d0、t0
‑
δt时刻物理量与t0
‑
2δt时刻物理量之间的差值d1是否同正负,若是,调整并更新设定工作频率后再次执行操作s1,若不是,执行操作s3,其中,t0为当前时刻,δt为相邻两次调节控制之间的时间间隔。
35.具体地,例如预先设定带宽搜索标志位和保持标志位;带宽搜索标志位赋予初始值1,带宽搜索标志位开启,开始带宽搜索过程;保持标志位赋予初始值0;带宽计数寄存器赋予初始值0。
36.带宽搜索过程中,检测当前时刻t0的斜率与上一时刻t0
‑
δt的斜率是否相同。其中,当前时刻t0的斜率为当前时刻t0检测到的物理量相较于上一时刻t0
‑
δt检测到的物理量的变化趋势,即差值d0的正负号;上一时刻t0
‑
δt的斜率为上一时刻t0
‑
δt检测到的物理量相较于上上时刻t0
‑
2δt检测到的物理量的变化趋势,即差值d1的正负号。若差值d0和差值d1同正负,则打开保持标志位,即将保持标志位置1,保持输出不变,同时增加带宽计数器寄存器的值以调整并更新设定工作频率,再次执行操作s1;若差值d0和差值d1正负不同,则关闭保持标志位,取消输出的保持状态,并执行操作s3。需要说明的是,本发明实施例中,当两个差值均为0时,这两个差值同正负;当一个差值为0,另一个差值不为0时,这两个差值正负不同。
37.操作s3,判断差值d1、t0
‑
2δt时刻物理量与t0
‑
3δt时刻物理量之间的差值d2是否同正负,若不是,重复执行操作s1
‑
操作s2,直至差值d1与差值d2同正负。
38.具体地,操作s3中,当前时刻t0的保持标志位处于关闭状态,此时需要判断上一时刻t0
‑
δt的保持标志位是否处于开启状态,即需要判断差值d1与差值d2是否同正负,如果差值d1与差值d2正负不同,重复执行操作s1
‑
操作s2,直至差值d1与差值d2同正负后关闭带宽搜索标志位,停止带宽搜索,并将带宽计数寄存器中保存的值赋值给计数器寄存器,计数器寄存器中保存的值即为操作s1中初始工作频率相较于最后一次更新得到的自适应设定工作频率的倍数。
39.本实施例中,根据预设的工作频率调整间隔调整并更新设定工作频率,即根据预设的参数增加带宽计数器寄存器的值。可以根据具体应用场景设置预设的工作频率调整间隔,以同时保证带宽搜索精度和速度。
40.操作s4,以最后一次更新得到的设定工作频率对应的频次调节控制光子器件的光学参数。
41.根据本发明的实施例,操作s4之后还包括:在光子器件的输出端实时监测光学参数对应的物理量;当物理量的抖动幅度大于抖动幅度阈值时,降低设定工作频率的值;当物理量的上升幅度大于上升幅度阈值或者下降幅度小于下降幅度阈值时,提高设定工作频率的值;当物理量的抖动幅度、上升幅度、下降幅度均在相应的幅度阈值时,设定工作频率的值保持不变。
42.参阅图2,本发明一实施例中,操作s1和操作s4中调节控制光子器件的光学参数包
括:判断当前时刻t0的斜率(即差值d0)是否大于0,以及判断上一时刻t0
‑
δt的控制值是否为1,来确定当前时刻t0的控制值。其中,控制值有0和1两种取值,为0时控制输出值(例如为输入至光子器件中的电压信号)减小,为1时控制输出值增加。
43.具体地,若差值d0>0且上一时刻的控制值为1,或者若差值d0≤0且上一时刻的控制值为0时,当前时刻的控制值赋值为1,否则,当前时刻的控制值赋值为0。
44.参阅图3,本发明另一实施例中,操作s1和操作s4中调节控制光子器件的光学参数包括:判断当前时刻t0的斜率是否小于0,以及判断上一时刻t0
‑
δt的控制值是否为1,来确定当前时刻t0的控制值。
45.具体地,若差值d0<0且上一时刻的控制值为1,或者若差值d0≥0且上一时刻的控制值为0时,当前时刻的控制值赋值为1,否则,当前时刻的控制值赋值为0。
46.本实施例中,图2所采用的算法称为最大值锁定算法,图3所采用的算法为最小值锁定算法,可统称为爬坡算法,适合需要锁定到局部最值点的应用场景。本实施例中的最值锁定算法能够有效地补偿工艺偏差、热波动以及输入激光变化带来的光学参数的变化,并且消耗较小的硬件资源,可以很好地应用于闭环反馈控制系统中。
47.根据本发明的实施例,光子器件为单个光子器件或光子器件阵列。当光子器件为光子器件阵列时,光学参数控制方法还包括:重复执行操作s1
‑
操作s4,以逐个调节控制光子器件阵列中各光子器件的光学参数。
48.进一步地,在各光子器件的输出端实时监测光学参数对应的物理量,对于任一光子器件而言,当其物理量的抖动幅度大于抖动幅度阈值时,降低设定工作频率的值;当其物理量的上升幅度大于上升幅度阈值或者下降幅度小于下降幅度阈值时,提高设定工作频率的值;当其物理量的抖动幅度、上升幅度、下降幅度均在相应的幅度阈值时,设定工作频率的值保持不变。
49.以图5
‑
图8所示应用场景为例说明本实施例中光学参数控制方法的具体应用过程。参阅图5,首先,监控单元检测环形谐振器下载端口/直通端口的光强并转换为相关的物理量,其中监控单元可以是光电二极管,物理量可以是电压值或电流值。其次,基于自适应工作频率的光学参数控制算法模块根据监控单元得到的物理量计算出合适的控制值并输出。然后,调谐单元根据算法模块输出的控制值对环形谐振器的谐振波长进行调节,调节方式为热调谐或电调谐;若物理量未达到最优值,重复执行上述过程以将物理量调整至最优值。
50.参阅图6,首先,监控单元检测马赫曾德尔干涉仪的光强并转换为相关的物理量,其中监控单元可以是光电二极管,物理量可以是电压值或电流值。其次,基于自适应工作频率的光学参数控制算法模块根据监控单元得到的物理量计算出合适的控制值并输出。然后,调谐单元根据算法模块输出的控制值对马赫曾德尔干涉仪的偏压点进行调节,调节方式为热调谐或电调谐;若物理量未达到最优值,重复执行上述过程以将物理量调整至最优值。
51.参阅图7,首先,监控单元复用器和调谐单元解复用器切换到n路环形谐振器阵列中的第一个环形谐振器。其次,监控单元检测环形谐振器下载端口/直通端口的光强并转换为相关的物理量,其中监控单元可以是光电二极管,物理量可以是电压值或电流值。再者,基于自适应工作频率的光学参数控制算法模块根据监控单元得到的物理量计算出合适的
控制值并输出。然后,调谐单元根据算法模块输出的控制值对环形谐振器的谐振波长进行调节,调节方式为热调谐或电调谐;若物理量未达到最优值,重复执行上述过程以将物理量调整至最优值。之后,监控单元复用器和调谐单元解复用器切换到下一个环形谐振器,重复执行上述过程直到最后一个环形谐振器的光学参数调节完成。
52.参阅图8,首先,监控单元复用器和调谐单元解复用器切换到n路马赫曾德尔干涉仪阵列中的第一个马赫曾德尔干涉仪。其次,监控单元检测马赫曾德尔干涉仪的光强并转换为相关的物理量,其中监控单元可以是光电二极管,物理量可以是电压值或电流值。再者,基于自适应工作频率的光学参数控制算法模块根据监控单元得到的物理量计算出合适的控制值并输出。然后,调谐单元根据算法模块输出的控制值对马赫曾德尔干涉仪的偏压点进行调节,调节方式为热调谐或电调谐;若物理量未达到最优值,重复执行上述过程以将物理量调整至最优值。之后,监控单元复用器和调谐单元解复用器切换到下一个马赫曾德尔干涉仪,重复执行上述过程直到最后一个马赫曾德尔干涉仪的光学参数调节完成。
53.图9为本发明实施例提供的基于自适应工作频率的光学参数控制系统的框图。参阅图9,该基于自适应工作频率的光学参数控制系统900包括监测模块910、更新模块920、重复执行模块930以及控制模块940。
54.监测模块910例如执行操作s1,用于以设定工作频率对应的频次调节控制光子器件的光学参数,并在光子器件的输出端监测光学参数对应的物理量。
55.更新模块920例如执行操作s2,用于判断t0时刻物理量与t0
‑
δt时刻物理量之间的差值d0、t0
‑
δt时刻物理量与t0
‑
2δt时刻物理量之间的差值d1是否同正负,若是,调整并更新设定工作频率后再次执行监测模块910,若不是,执行重复执行模块,其中,t0为当前时刻,δt为相邻两次调节控制之间的时间间隔。
56.重复执行模块930例如执行操作s3,用于判断差值d1、t0
‑
2δt时刻物理量与t0
‑
3δt时刻物理量之间的差值d2是否同正负,若不是,重复执行监测模块和更新模块,直至差值d1与差值d2同正负。
57.控制模块940例如执行操作s4,用于以最后一次更新得到的设定工作频率对应的频次调节控制光子器件的光学参数。
58.基于自适应工作频率的光学参数控制系统900还包括实时监测控制模块。实时监测控制模块用于在控制模块执行完成之后,在光子器件的输出端实时监测光学参数对应的物理量;当物理量的抖动幅度大于抖动幅度阈值时,降低设定工作频率的值;当物理量的上升幅度大于上升幅度阈值或者下降幅度小于下降幅度阈值时,提高设定工作频率的值。
59.基于自适应工作频率的光学参数控制系统900用于执行上述图1
‑
图8所示实施例中的基于自适应工作频率的光学参数控制方法。本实施例未尽之细节,请参阅前述图1
‑
图8所示实施例中的基于自适应工作频率的光学参数控制方法,此处不再赘述。
60.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。