1.本发明涉及健康管理技术领域,具体涉及一种脊柱健康情况监测方法。
背景技术:
2.当前社会,由于人们久坐、长时间玩手机和伏案工作等,导致脊柱退行性变过早发生。据流行病学调查研究,脊柱退行性疾病的发病率由2005年的24.2%上升到2017年的30.1%。颈椎曲度变直在学生中患病率高达29.1%;而每年新增的腰椎退行性变的患者,占人口总数的3.63%。对于脊柱病变的高发人群,进行长期脊柱健康监测是十分有必要的。另外,由于各种疾病接受脊柱手术后的患者,也需要经常进行脊柱健康情况检测。
3.通常情况下,脊柱亚健康人群只有出现症状后才会注意到病情,前往医院问诊,医生基于患者的影像学结果对其脊柱健康情况进行判断。这种方式存在较大问题。第一,该方式只有症状严重后才会得到患者注意。第二,该方式往往需要进行放射性影像学检查。第三,患者需付出较大的时间成本和经济成本。
4.当患者认识到脊柱健康问题,需要居家监测脊柱健康情况,或在医院接受治疗后回家进行康复锻炼,依旧面临无法方便地监测脊柱健康数据的问题。
5.因此,目前亟需一种便捷监测脊柱健康情况的方法。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本发明提供了一种脊柱健康情况监测方法,解决了脊柱健康情况无法便捷监测的问题。
8.(二)技术方案
9.为实现以上目的,本发明通过以下技术方案予以实现:
10.一种脊柱健康情况监测方法,所述方法包括如下步骤:
11.s1、标定监测点:
12.采用穿戴传感器对监测对象脊柱的关键部位进行监测点标定,标定的监测点包括:a、颈椎:c7突起处;b、胸椎:左、右乳头;c、肺叶:第十二对肋骨最低点;d、腰椎:肚脐;e胯部:髋骨两侧突起处;
13.s2、采集静态数据:
14.以肚脐为原点,建立监测对象正面的二维坐标系,在监测对象静态立正的状态下,采集所述监测点在该坐标系中的投影坐标记录为静态数据;
15.s3、采集动态数据:
16.以肚脐为原点,建立监测对象正面的二维坐标系,监测对象以最大角度进行左/右转身动作、左/右侧身动作和前/后屈体动作,分别在上述状态下,采集所述监测点在所述坐标系中的投影坐标记录为动态数据;
17.s4、数据标注:
18.对监测对象进行x光成像,由医生判断其脊柱是否健康,用判断结果对静态数据和动态数据进行标注;
19.s5、聚合矩阵:
20.将静态数据和标注直接连接聚合为静态矩阵;将静态数据、动态数据和标注聚合为动态矩阵;所述动态矩阵为[左转身活动度特征值,右转身活动度特征值,左侧身活动度特征值,右侧身活动度特征值,前屈活动度特征值,后凸活动度特征值,cobb特征值,腰骶特征值,健康or患病];
[0021]
s6、多组采集:
[0022]
对若干不同的监测对象进行监测,重复s1~s5步骤,得到若干组静态矩阵和动态矩阵;
[0023]
s7、训练模型:
[0024]
将若干组静态矩阵和动态矩阵分别输入机器学习算法训练模型得到静态模型和动态模型;
[0025]
s8、用户监测:
[0026]
对用户进行监测,重复s1~s3步骤,并将用户的静态数据和动态数据分别输入模型,获取监测结果;监测结果判断标准为:两模型都认为患病为患病;两模型中仅一个认为患病为有患病风险;两模型都认为健康为健康。
[0027]
优选的,所述静态数据的格式为:
[0028]
[静态,颈椎,(x
a01
,y
a01
),
[0029]
静态,胸椎,(x
b01
,y
b01
),(x
b02
,y
b02
),
[0030]
静态,肺叶,(x
c01
,y
c01
),(x
c02
,y
c02
),
[0031]
静态,腰椎,(x
d01
,y
d01
),
[0032]
静态,胯部,(x
e01
,y
e01
),(x
e02
,y
e02
)];
[0033]
所述动态数据的格式为:
[0034]
[动态,左转身,颈椎,(x
a11
,y
a11
),
[0035]
动态,左转身,胸椎,(x
b11
,y
b11
),(x
b12
,y
b12
),
[0036]
动态,左转身,肺叶,(x
c11
,y
c11
),(x
c12
,y
c12
),
[0037]
动态,左转身,腰椎,(x
d11
,y
d11
),
[0038]
动态,左转身,胯部,(x
e11
,y
e11
),(x
e12
,y
e12
),
[0039]
动态,右转身,颈椎,(x
a21
,y
a21
),
[0040]
动态,右转身,胸椎,(x
b21
,y
b21
),(x
b22
,y
b22
),
[0041]
动态,右转身,肺叶,(x
c21
,y
c21
),(x
c22
,y
c22
),
[0042]
动态,右转身,腰椎,(x
d21
,y
d21
),
[0043]
动态,右转身,胯部,(x
e21
,y
e21
),(x
e22
,y
e22
),
[0044]
动态,左侧身,颈椎,(x
a31
,y
a31
),
[0045]
动态,左侧身,胸椎,(x
b31
,y
b31
),(x
b32
,y
b32
),
[0046]
动态,左侧身,肺叶,(x
c31
,y
c31
),(x
c32
,y
c32
),
[0047]
动态,左侧身,腰椎,(x
d31
,y
d31
),
[0048]
动态,左侧身,胯部,(x
e31
,y
e31
),(x
e32
,y
e32
),
[0049]
动态,右侧身,颈椎,(x
a41
,y
a41
),
[0050]
动态,右侧身,胸椎,(x
b41
,y
b41
),(x
b42
,y
b42
),
[0051]
动态,右侧身,肺叶,(x
c41
,y
c41
),(x
c42
,y
c42
),
[0052]
动态,右侧身,腰椎,(x
d41
,y
d41
),
[0053]
动态,右侧身,胯部,(x
e41
,y
e41
),(x
e42
,y
e42
),
[0054]
动态,前屈体,颈椎,(x
a51
,y
a51
),
[0055]
动态,前屈体,胸椎,(x
b51
,y
b51
),(x
b52
,y
b52
),
[0056]
动态,前屈体,肺叶,(x
c51
,y
c51
),(x
c52
,y
c52
),
[0057]
动态,前屈体,腰椎,(x
d51
,y
d51
),
[0058]
动态,前屈体,胯部,(x
e51
,y
e51
),(x
e52
,y
e52
),
[0059]
动态,后屈体,颈椎,(x
a61
,y
a61
),
[0060]
动态,后屈体,胸椎,(x
b61
,y
b61
),(x
b62
,y
b62
),
[0061]
动态,后屈体,肺叶,(x
c61
,y
c61
),(x
c62
,y
c62
),
[0062]
动态,后屈体,腰椎,(x
d61
,y
d61
),
[0063]
动态,后屈体,胯部,(x
e61
,y
e61
),(x
e62
,y
e62
)]。
[0064]
优选的,所述动态矩阵中,左转身活动度特征值=
[0065]
[动态左转身胸椎x
b11
‑
静态胸椎x
b01
,动态左转身胸椎x
b12
‑
静态胸椎x
b02
,
[0066]
动态左转身肺叶x
c11
‑
静态肺叶x
c01
,动态左转身肺叶x
c12
‑
静态肺叶x
c02
,
[0067]
动态左转身胯部x
e11
‑
静态胯部x
e01
,动态左转身胯部x
e12
‑
静态胯部x
e02
];
[0068]
右转身活动度特征值=
[0069]
[动态右转身胸椎x
b21
‑
静态胸椎x
b01
,动态右转身胸椎x
b22
‑
静态胸椎x
b02
,
[0070]
动态右转身肺叶x
c21
‑
静态肺叶x
c01
,动态右转身肺叶x
c22
‑
静态肺叶x
c02
,
[0071]
动态右转身胯部x
e21
‑
静态胯部x
e01
,动态右转身胯部x
e22
‑
静态胯部x
e02
];
[0072]
左侧身活动度特征值=
[0073]
[动态左侧身颈椎x
a31
‑
静态颈椎x
a01
,动态左侧身颈椎y
a31
‑
静态颈椎y
a01
,
[0074]
动态左侧身胸椎y
b31
‑
静态胸椎y
b01
,动态左侧身胸椎y
b32
‑
静态胸椎y
b02
,
[0075]
动态左侧身肺叶y
c31
‑
静态肺叶y
c01
,动态左侧身肺叶y
c32
‑
静态肺叶y
c02
,
[0076]
动态左侧身颈椎x
a31
‑
静态腰椎x
d01
,动态左侧身颈椎y
a31
‑
静态腰椎y
d01
,
[0077]
动态左侧身胸椎y
b31
‑
静态胯部y
e01
,动态左侧身胸椎y
b32
‑
静态胯部y
e02
];
[0078]
右侧身活动度特征值=
[0079]
[动态右侧身颈椎x
a41
‑
静态颈椎x
a01
,动态右侧身颈椎y
a41
‑
静态颈椎y
a01
,
[0080]
动态右侧身胸椎y
b41
‑
静态胸椎y
b01
,动态右侧身胸椎y
b42
‑
静态胸椎y
b02
,
[0081]
动态右侧身肺叶y
c41
‑
静态肺叶y
c01
,动态右侧身肺叶y
c42
‑
静态肺叶y
c02
,
[0082]
动态右侧身颈椎x
a41
‑
静态腰椎x
d01
,动态右侧身颈椎y
a41
‑
静态腰椎y
d01
,
[0083]
动态右侧身胸椎y
b41
‑
静态胯部y
e01
,动态右侧身胸椎y
b42
‑
静态胯部y
e02
];
[0084]
前屈活动度特征值=
[0085]
[动态前屈体颈椎y
a51
‑
静态颈椎y
a01
,
[0086]
动态前屈体胸椎y
b51
y
b52
‑
静态颈椎y
a01
*2,
[0087]
动态前屈体肺叶y
c51
y
c52
坐标
‑
静态颈椎y
a01
*2,
[0088]
动态前屈体腰椎y
d51
‑
静态颈椎y
a01
,
[0089]
动态前屈体胯部y
e51
y
e52
‑
静态颈椎y
a01
*2];
[0090]
后凸活动度特征值=
[0091]
[动态前屈体颈椎y
a61
‑
静态颈椎y
a01
,
[0092]
动态前屈体胸椎y
b61
y
b62
‑
静态颈椎y
a01
*2,
[0093]
动态前屈体肺叶y
c61
y
c62
坐标
‑
静态颈椎y
a01
*2,
[0094]
动态前屈体腰椎y
d61
‑
静态颈椎y
a01
,
[0095]
动态前屈体胯部y
e61
y
e62
‑
静态颈椎y
a01
*2];
[0096]
cobb特征值=
[0097]
[静态颈椎x
a01
‑
静态胸椎x
b01
静态颈椎x
a01
‑
静态胸椎x
b02
,
[0098]
静态颈椎x
a01
‑
静态肺叶x
c01
静态颈椎x
a01
‑
静态肺叶x
c02
,
[0099]
静态颈椎x
a01
‑
静态腰椎x
d01
,
[0100]
静态颈椎x
a01
‑
静态胯部x
e01
静态颈椎x
a01
‑
静态胯部x
e02
,
[0101]
(静态胸椎x
b01
‑
静态肺叶x
c01
)
‑
(静态胸椎x
b02
‑
静态肺叶x
c02
),
[0102]
(静态肺叶x
c01
‑
静态胯部x
e01
)
‑
(静态肺叶x
c02
‑
静态胯部x
e02
)];
[0103]
腰骶特征值=
[0104]
[静态胯部x
e01
‑
静态胯部x
e02
,静态胯部y
e01
‑
静态胯部y
e02
,
[0105]
静态腰椎x
d01
‑
静态胯部x
e01
,静态腰椎x
d01
‑
静态胯部x
e02
,
[0106]
静态腰椎y
d01
‑
静态胯部y
e01
,静态腰椎y
d01
‑
静态胯部y
e02
]。
[0107]
优选的,所述s7中,静态模型和动态模型的机器学习算法包括但不限于:线性回归、logistic回归、支持向量机、k均值临近、随机森林、朴素贝叶斯、决策树。
[0108]
优选的,所述s4中,医生判断监测对象的脊柱是否健康的依据包括:监测对象的静止体态和x光成像是否有明显扭曲、监测对象是否存在动态失衡和/或移动受限;所述s7中,所述机器学习算法模仿医生决策过程,对监测对象的静态矩阵和动态矩阵分别建模。
[0109]
优选的,所述方法还包括步骤如下:
[0110]
s9、日常监测:
[0111]
所述s8中,用户监测得到结果后,持续测量用户监测点的数据,获得用户的日常行为数据,并在日常行为数据尾部加盖时间戳及所述s8中监测的结果;所述日常行为数据的格式为:
[0112]
[日常,颈椎,(x
a91
,y
a91
),
[0113]
日常,胸椎,(x
b91
,y
b91
),(x
b92
,y
b92
),
[0114]
日常,肺叶,(x
c91
,y
c91
),(x
c92
,y
c92
),
[0115]
日常,腰椎,(x
d91
,y
d91
),
[0116]
日常,胯部,(x
e91
,y
e91
),(x
e92
,y
e92
),时间,健康or有患病风险or患病];
[0117]
s10、日常行为训练模型:
[0118]
在脊椎疾病康复过程中,医生会建议进行一些特定的康复运动,并且避免不正确的姿态;根据医生提供的基本数据建立初步模型,而后,将若干用户的日常行为数据上传,输入神经网络算法,在初步模型的基础上进一步训练模型,得到日常模型,所述日常模型通过用户的日常行为就能判断其脊柱的健康情况,并可以对用户的不正常姿态进行提醒。
[0119]
(三)有益效果
[0120]
本发明提供了一种脊柱健康情况监测方法。与现有技术相比,具备以下有益效果:
[0121]
本发明中,通过对监测对象的颈椎、胸椎、肺叶、腰椎和胯部这些关键部位进行监测,采集静态和动态数据,再由医生判断监测对象的脊柱是否健康,对数据进行标注,数据与标注聚合得到静态矩阵和动态矩阵,训练模型得到静态模型和动态模型,通过两个模型,用户随时随地通过穿戴传感器就能监测自己的脊柱健康情况,无需去医院挂号拍片检查,节约了大量的时间成本和经济成本,并且能够在病症早期就得到注意,便于医治康复。
附图说明
[0122]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0123]
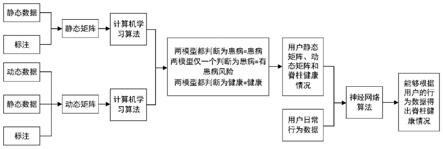
图1为本发明实施例中脊柱健康情况监测方法的流程图;
[0124]
图2为本发明实施例中监测点的位置示意图。
具体实施方式
[0125]
为使本发明实施例的目的、技术方案和优点更加清楚,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0126]
本技术实施例通过提供一种脊柱健康情况监测方法,解决了脊柱健康情况无法便捷监测的问题。
[0127]
本技术实施例中的技术方案为解决上述技术问题,总体思路如下:
[0128]
本发明实施例中,通过对监测对象的颈椎、胸椎、肺叶、腰椎和胯部这些关键部位进行监测,采集静态和动态数据,再由医生判断监测对象的脊柱是否健康,对数据进行标注,数据与标注聚合得到静态矩阵和动态矩阵,训练模型得到静态模型和动态模型,通过两个模型,用户随时随地通过穿戴传感器就能监测自己的脊柱健康情况,无需去医院挂号拍片检查,节约了大量的时间成本和经济成本,并且能够在病症早期就得到注意,便于医治康复。
[0129]
为了更好的理解上述技术方案,下面将对上述技术方案进行详细的说明。
[0130]
实施例:
[0131]
如图1、图2所示,本发明提供了一种脊柱健康情况监测方法,所述方法包括如下步骤:
[0132]
s1、标定监测点:
[0133]
采用穿戴传感器对监测对象脊柱的关键部位进行监测点标定,标定的监测点包括:a、颈椎:c7突起处;b、胸椎:左、右乳头;c、肺叶:第十二对肋骨最低点;d、腰椎:肚脐;e胯部:髋骨两侧突起处;
[0134]
s2、采集静态数据:
[0135]
以肚脐为原点,建立监测对象正面的二维坐标系,在监测对象静态立正的状态下,采集所述监测点在该坐标系中的投影坐标记录为静态数据;
[0136]
s3、采集动态数据:
[0137]
以肚脐为原点,建立监测对象正面的二维坐标系,监测对象以最大角度进行左/右转身动作、左/右侧身动作和前/后屈体动作,分别在上述状态下,采集所述监测点在所述坐标系中的投影坐标记录为动态数据;
[0138]
s4、数据标注:
[0139]
对监测对象进行x光成像,由医生判断其脊柱是否健康,用判断结果对静态数据和动态数据进行标注;
[0140]
s5、聚合矩阵:
[0141]
将静态数据和标注直接连接聚合为静态矩阵;将静态数据、动态数据和标注聚合为动态矩阵;所述动态矩阵为[左转身活动度特征值,右转身活动度特征值,左侧身活动度特征值,右侧身活动度特征值,前屈活动度特征值,后凸活动度特征值,cobb特征值,腰骶特征值,健康or患病];
[0142]
s6、多组采集:
[0143]
对若干不同的监测对象进行监测,重复s1~s5步骤,得到若干组静态矩阵和动态矩阵;
[0144]
s7、训练模型:
[0145]
将若干组静态矩阵和动态矩阵分别输入机器学习算法训练模型得到静态模型和动态模型;
[0146]
s8、用户监测:
[0147]
对用户进行监测,重复s1~s3步骤,并将用户的静态数据和动态数据分别输入模型,获取监测结果;监测结果判断标准为:两模型都认为患病为患病;两模型中仅一个认为患病为有患病风险;两模型都认为健康为健康。
[0148]
通过对监测对象的颈椎、胸椎、肺叶、腰椎和胯部这些关键部位进行监测,采集静态和动态数据,再由医生判断监测对象的脊柱是否健康,对数据进行标注,数据与标注聚合得到静态矩阵和动态矩阵,训练模型得到静态模型和动态模型,通过两个模型,用户随时随地通过穿戴传感器就能监测自己的脊柱健康情况,无需去医院挂号拍片检查,节约了大量的时间成本和经济成本,并且能够在病症早期就得到注意,便于医治康复。
[0149]
如图2所示,所述静态数据的格式为:
[0150]
[静态,颈椎,(x
a01
,y
a01
),
[0151]
静态,胸椎,(x
b01
,y
b01
),(x
b02
,y
b02
),
[0152]
静态,肺叶,(x
c01
,y
c01
),(x
c02
,y
c02
),
[0153]
静态,腰椎,(x
d01
,y
d01
),
[0154]
静态,胯部,(x
e01
,y
e01
),(x
e02
,y
e02
)];
[0155]
所述动态数据的格式为:
[0156]
[动态,左转身,颈椎,(x
a11
,y
a11
),
[0157]
动态,左转身,胸椎,(x
b11
,y
b11
),(x
b12
,y
b12
),
[0158]
动态,左转身,肺叶,(x
c11
,y
c11
),(x
c12
,y
c12
),
[0159]
动态,左转身,腰椎,(x
d11
,y
d11
),
[0160]
动态,左转身,胯部,(x
e11
,y
e11
),(x
e12
,y
e12
),
[0161]
动态,右转身,颈椎,(x
a21
,y
a21
),
[0162]
动态,右转身,胸椎,(x
b21
,y
b21
),(x
b22
,y
b22
),
[0163]
动态,右转身,肺叶,(x
c21
,y
c21
),(x
c22
,y
c22
),
[0164]
动态,右转身,腰椎,(x
d21
,y
d21
),
[0165]
动态,右转身,胯部,(x
e21
,y
e21
),(x
e22
,y
e22
),
[0166]
动态,左侧身,颈椎,(x
a31
,y
a31
),
[0167]
动态,左侧身,胸椎,(x
b31
,y
b31
),(x
b32
,y
b32
),
[0168]
动态,左侧身,肺叶,(x
c31
,y
c31
),(x
c32
,y
c32
),
[0169]
动态,左侧身,腰椎,(x
d31
,y
d31
),
[0170]
动态,左侧身,胯部,(x
e31
,y
e31
),(x
e32
,y
e32
),
[0171]
动态,右侧身,颈椎,(x
a41
,y
a41
),
[0172]
动态,右侧身,胸椎,(x
b41
,y
b41
),(x
b42
,y
b42
),
[0173]
动态,右侧身,肺叶,(x
c41
,y
c41
),(x
c42
,y
c42
),
[0174]
动态,右侧身,腰椎,(x
d41
,y
d41
),
[0175]
动态,右侧身,胯部,(x
e41
,y
e41
),(x
e42
,y
e42
),
[0176]
动态,前屈体,颈椎,(x
a51
,y
a51
),
[0177]
动态,前屈体,胸椎,(x
b51
,y
b51
),(x
b52
,y
b52
),
[0178]
动态,前屈体,肺叶,(x
c51
,y
c51
),(x
c52
,y
c52
),
[0179]
动态,前屈体,腰椎,(x
d51
,y
d51
),
[0180]
动态,前屈体,胯部,(x
e51
,y
e51
),(x
e52
,y
e52
),
[0181]
动态,后屈体,颈椎,(x
a61
,y
a61
),
[0182]
动态,后屈体,胸椎,(x
b61
,y
b61
),(x
b62
,y
b62
),
[0183]
动态,后屈体,肺叶,(x
c61
,y
c61
),(x
c62
,y
c62
),
[0184]
动态,后屈体,腰椎,(x
d61
,y
d61
),
[0185]
动态,后屈体,胯部,(x
e61
,y
e61
),(x
e62
,y
e62
)]。
[0186]
所述动态矩阵中,左转身活动度特征值=
[0187]
[动态左转身胸椎x
b11
‑
静态胸椎x
b01
,动态左转身胸椎x
b12
‑
静态胸椎x
b02
,
[0188]
动态左转身肺叶x
c11
‑
静态肺叶x
c01
,动态左转身肺叶x
c12
‑
静态肺叶x
c02
,
[0189]
动态左转身胯部x
e11
‑
静态胯部x
e01
,动态左转身胯部x
e12
‑
静态胯部x
e02
];
[0190]
右转身活动度特征值=
[0191]
[动态右转身胸椎x
b21
‑
静态胸椎x
b01
,动态右转身胸椎x
b22
‑
静态胸椎x
b02
,
[0192]
动态右转身肺叶x
c21
‑
静态肺叶x
c01
,动态右转身肺叶x
c22
‑
静态肺叶x
c02
,
[0193]
动态右转身胯部x
e21
‑
静态胯部x
e01
,动态右转身胯部x
e22
‑
静态胯部x
e02
];
[0194]
左侧身活动度特征值=
[0195]
[动态左侧身颈椎x
a31
‑
静态颈椎x
a01
,动态左侧身颈椎y
a31
‑
静态颈椎y
a01
,
[0196]
动态左侧身胸椎y
b31
‑
静态胸椎y
b01
,动态左侧身胸椎y
b32
‑
静态胸椎y
b02
,
[0197]
动态左侧身肺叶y
c31
‑
静态肺叶y
c01
,动态左侧身肺叶y
c32
‑
静态肺叶y
c02
,
[0198]
动态左侧身颈椎x
a31
‑
静态腰椎x
d01
,动态左侧身颈椎y
a31
‑
静态腰椎y
d01
,
[0199]
动态左侧身胸椎y
b31
‑
静态胯部y
e01
,动态左侧身胸椎y
b32
‑
静态胯部y
e02
];
[0200]
右侧身活动度特征值=
[0201]
[动态右侧身颈椎x
a41
‑
静态颈椎x
a01
,动态右侧身颈椎y
a41
‑
静态颈椎y
a01
,
[0202]
动态右侧身胸椎y
b41
‑
静态胸椎y
b01
,动态右侧身胸椎y
b42
‑
静态胸椎y
b02
,
[0203]
动态右侧身肺叶y
c41
‑
静态肺叶y
c01
,动态右侧身肺叶y
c42
‑
静态肺叶y
c02
,
[0204]
动态右侧身颈椎x
a41
‑
静态腰椎x
d01
,动态右侧身颈椎y
a41
‑
静态腰椎y
d01
,
[0205]
动态右侧身胸椎y
b41
‑
静态胯部y
e01
,动态右侧身胸椎y
b42
‑
静态胯部y
e02
];
[0206]
前屈活动度特征值=
[0207]
[动态前屈体颈椎y
a51
‑
静态颈椎y
a01
,
[0208]
动态前屈体胸椎y
b51
y
b52
‑
静态颈椎y
a01
*2,
[0209]
动态前屈体肺叶y
c51
y
c52
坐标
‑
静态颈椎y
a01
*2,
[0210]
动态前屈体腰椎y
d51
‑
静态颈椎y
a01
,
[0211]
动态前屈体胯部y
e51
y
e52
‑
静态颈椎y
a01
*2];
[0212]
后凸活动度特征值=
[0213]
[动态前屈体颈椎y
a61
‑
静态颈椎y
a01
,
[0214]
动态前屈体胸椎y
b61
y
b62
‑
静态颈椎y
a01
*2,
[0215]
动态前屈体肺叶y
c61
y
c62
坐标
‑
静态颈椎y
a01
*2,
[0216]
动态前屈体腰椎y
d61
‑
静态颈椎y
a01
,
[0217]
动态前屈体胯部y
e61
y
e62
‑
静态颈椎y
a01
*2];
[0218]
cobb特征值=
[0219]
[静态颈椎x
a01
‑
静态胸椎x
b01
静态颈椎x
a01
‑
静态胸椎x
b02
,
[0220]
静态颈椎x
a01
‑
静态肺叶x
c01
静态颈椎x
a01
‑
静态肺叶x
c02
,
[0221]
静态颈椎x
a01
‑
静态腰椎x
d01
,
[0222]
静态颈椎x
a01
‑
静态胯部x
e01
静态颈椎x
a01
‑
静态胯部x
e02
,
[0223]
(静态胸椎x
b01
‑
静态肺叶x
c01
)
‑
(静态胸椎x
b02
‑
静态肺叶x
c02
),
[0224]
(静态肺叶x
c01
‑
静态胯部x
e01
)
‑
(静态肺叶x
c02
‑
静态胯部x
e02
)]
[0225]
腰骶特征值=
[0226]
[静态胯部x
e01
‑
静态胯部x
e02
,静态胯部y
e01
‑
静态胯部y
e02
,
[0227]
静态腰椎x
d01
‑
静态胯部x
e01
,静态腰椎x
d01
‑
静态胯部x
e02
,
[0228]
静态腰椎y
d01
‑
静态胯部y
e01
,静态腰椎y
d01
‑
静态胯部y
e02
]。
[0229]
所述s7中,静态模型和动态模型的机器学习算法包括但不限于:线性回归、logistic回归、支持向量机、k均值临近、随机森林、朴素贝叶斯、决策树。
[0230]
所述s4中,医生判断监测对象的脊柱是否健康的依据包括:监测对象的静止体态和x光成像是否有明显扭曲、监测对象是否存在动态失衡和/或移动受限;所述s7中,所述机器学习算法模仿医生决策过程,对监测对象的静态矩阵和动态矩阵分别建模,通过静态模型和动态模型叠加,能够精确判断监测对象的脊柱健康情况。
[0231]
如图1所示,所述方法还包括步骤如下:
[0232]
s9、日常监测:
[0233]
所述s8中,用户监测得到结果后,持续测量用户监测点的数据,获得用户的日常行为数据,并在日常行为数据尾部加盖时间戳及所述s8中监测的结果;所述日常行为数据的格式为:
[0234]
[日常,颈椎,(x
a91
,y
a91
),
[0235]
日常,胸椎,(x
b91
,y
b91
),(x
b92
,y
b92
),
[0236]
日常,肺叶,(x
c91
,y
c91
),(x
c92
,y
c92
),
[0237]
日常,腰椎,(x
d91
,y
d91
),
[0238]
日常,胯部,(x
e91
,y
e91
),(x
e92
,y
e92
),时间,健康or有患病风险or患病];
[0239]
s10、日常行为训练模型:
[0240]
在脊椎疾病康复过程中,医生会建议进行一些特定的康复运动,并且避免不正确的姿态;根据医生提供的基本数据建立初步模型,而后,将若干用户的日常行为数据上传,输入神经网络算法,在初步模型的基础上进一步训练模型,得到日常模型,所述日常模型通过用户的日常行为就能判断其脊柱的健康情况,并可以对用户的不正常姿态进行提醒。
[0241]
综上所述,与现有技术相比,本发明具备以下有益效果:
[0242]
本发明实施例中,通过对监测对象的颈椎、胸椎、肺叶、腰椎和胯部这些关键部位进行监测,采集静态和动态数据,再由医生判断监测对象的脊柱是否健康,对数据进行标注,数据与标注聚合得到静态矩阵和动态矩阵,训练模型得到静态模型和动态模型,通过两个模型,用户随时随地通过穿戴传感器就能监测自己的脊柱健康情况,无需去医院挂号拍片检查,节约了大量的时间成本和经济成本,并且能够在病症早期就得到注意,便于医治康复。
[0243]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0244]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。