1.本发明涉及一种基于流体的牙齿清洁系统,并且涉及一种利用基于流体的牙齿清洁系统来清洁用户牙齿的方法,以及一种计算机程序元件和一种计算机可读介质。
背景技术:
2.gb2538301公开了一种牙齿清洁器具,包括:手柄;流体输送系统,用于将工作流体输送至用户的牙齿,当器具沿用户的牙齿移动时,流体输送系统的至少一部分(例如管嘴)相对于手柄是可移动的;传感器,用于随着流体输送系统的至少一部分相对于手柄移动而提供变化的输出;以及控制电路,用于根据来自传感器的输出而致动工作流体到用户牙齿的输送。
3.当使用混合式水牙线/牙刷产品时,如果牙间喷射持续进行,用户在同时使用刷洗和牙线清洁功能时会感觉提供至口腔内的水过多
‑
参见例如us9987109和us9814302。此外,对大型流体贮存器的需求使得设备笨重且难以移动,并且由于存在大量流体,牙膏中的氟化物的重要作用被大大削弱。此外,如果牙刷移动过快,归因于喷射在牙齿上而不是牙齿之间,牙线清洁动作无法正确地起作用。
技术实现要素:
4.提供能够利用牙线清洁设备和/或混合式牙线/牙刷用于清洁牙齿的改进设备将是有利的。
5.本发明的目的通过独立权利要求的主题实现,其中进一步的实施例被包含在从属权利要求中。应当注意的是,以下描述的本发明的方面和示例同样适用于基于流体的牙齿清洁系统和利用基于流体的牙齿清洁系统来清洁用户牙齿的方法,以及用于计算机程序元件和计算机可读介质。
6.在第一方面,提供了一种基于流体的牙齿清洁系统,系统包括:可保持主体、流体输送单元、至少一个传感器、以及控制单元。可保持主体被配置为被耦接至头部。流体输送单元被配置为被耦接至管嘴,管嘴被配置为发射流体。管嘴被包括在头部内。至少一个传感器向控制单元提供与头部相对于用户牙齿相关的信息。控制单元利用该信息以使得流体输送单元能够将流体从管嘴发射到用户牙齿上。
7.根据本发明,至少一个传感器包括移动传感器,移动传感器被配置为确定与头部相对于用户牙齿的速率相关的速率信息。以这种方式,速率信息可以用于调节流向牙齿的液体流。
8.速率信息例如在诸如牙间间距的基准位置已经被定位时还可以被用于确定位置。然后,可以将以一定速率远离该基准位置的移动转换为距离,并且以这种方式,例如可以确定头部何时移动远离牙间间距,以及头部何时移回该牙间间距。而且,在知道平均牙齿尺寸的情况下,例如,如果已经检测了牙间间距,则可以将检测速率下的横向移动转换为等于预期邻近牙间间距的距离。然后,管嘴可以在该新位置处发射流体射流,和/或在预期存在此
类牙间间距的位置处开始检测牙间间距的过程。因此,管嘴随后可以在下一牙间间隙发射牙线射流。因此,基于预测或预期来启用喷射,这考虑了系统中的时滞,否则系统将无法在精确的位置(诸如牙间间隙)启用喷射。
9.换句话说,口腔清洁设备相对于用户牙齿感测例如牙刷或牙线清洁设备的头部,并且使用该信息来调节喷射到用户牙齿上的流体射流。以这种方式,基于传感器的输出来调节流体射流,使得需要的清洁流体(诸如水)更少。这意味着用户口腔中积聚的流体更少,形成更舒适的清洁方案,并且流体贮存器可以比先前所需的小得多,甚至可以位于口腔清洁设备的手柄内。在一个示例中,控制单元被配置为基于至少一个传感器中一个或多个传感器的输出,控制流体输送单元调节来自管嘴的流体流。
10.在一个示例中,控制单元被配置为控制流体输送单元,以基于至少一个传感器中的一个或多个传感器的输出调节来自管嘴的流体流。
11.在一个示例中,控制单元被配置为使得流体输送单元能够在头部位于使得流体被引导而撞击用户牙齿的牙间间隙的位置处时、从管嘴发射流体。
12.换句话说,当流体发射管嘴正指向正确的方向时,管嘴仅在正确的时间发射牙线流体射流。
13.在一个示例中,控制单元被配置为控制用户接口单元以向用户输出关于头部移动的信息。
14.换句话说,该系统使得能够改变用户行为,因为系统向用户提供反馈,使得用户能够相对于牙齿有效地定位可保持主体(诸如牙刷),从而将牙线射流引导至正确的方向,即朝向牙间间距,并且如果需要,还朝向牙龈线。因此,例如,可以向用户提供反馈,使得用户能够以使得牙线射流根据需要被引导的方式移动可保持主体。
15.在一个示例中,控制单元被配置为利用与头部相对于用户牙齿相关的信息,在头部位于使得流体将被引导而撞击用户牙齿表面的位置时来阻止流体输送单元从管嘴发射流体。因此,此时,在不需要被引导发射的位置(例如在咬合侧处),不发射牙线射流。然后,使得能够精确地(实际上仅)在两个牙齿之间(牙间/牙缝)和/或靠近牙龈线的位置处朝龈下牙周袋喷射。
16.在一个示例中,至少一个传感器包括位置(即取向和定位)传感器,该位置传感器被配置为确定与头部相对于用户牙齿相关的位置信息。
17.在一个示例中,位置信息包括与头部何时位于使管嘴被定位为邻近于用户牙齿的牙间间隙的位置处有关的信息。以这种方式,诸如牙刷的可保持主体感测其喷射管嘴何时指向所需方向,从而使得牙线射流能够有效地清洁牙间间距,并且如果需要,还清洁牙龈线。
18.在一个示例中,位置信息包括与头部何时位于使得管嘴被定位为邻近于用户牙齿的牙龈线的位置有关的信息。
19.在一个示例中,控制单元被配置为利用位置信息来确定第一牙间间隙的位置,并且利用速率信息确定已经移动远离该位置的头部何时回到该位置。控制单元被配置为在头部回到第一牙间间隙的位置后,激活流体输送单元以从管嘴发射流体。以这种方式,可以检测牙间间隙,但是在流体输送单元激活来自其管嘴的牙线流体射流的发射之前可以存在时滞,并且在能够发射牙线射流之前,头部可能已经横向移动。因此,通过检测牙间间距,可以
记录该位置,然后当头部来回移动时,速率信息被转换为相对于检测的牙间间距的位置信息。因此,当头部开始接近检测到的牙间间距时,流体输送单元可能已经充好电或在充电,并且立即沿正确的方向引导牙线射流。
20.在一个示例中,控制单元被配置为利用位置信息来确定第一牙间间隙的位置,并且利用速率信息确定头部何时移动至与第一牙间间隙邻近的第二牙间间隙的位置。控制单元被配置为在头部位于第二牙间间隙时,激活流体输送单元以从管嘴发射流体。以这种方式,可以检测牙间间隙,但是在流体输送单元可以激活来自其管嘴的发射牙线流体射流的发射之前可以存在时滞,并且在能够发射牙线射流之前,例如牙刷的头部可能已经横向移动。因此,通过检测牙间间距,可以记录该位置,然后当头部来回移动时,速率信息被转换为相对于检测的牙间间距的位置信息。随后,关于牙齿尺寸的知识可以用于估计头部何时接近邻近的牙间间距,并且流体输送单元可以充好电或在充电,以准备在例如检测到下一牙间间隙时,向下一牙间间隙发射牙线射流。
21.在一个示例中,控制单元被配置为在头部的速率大于第一阈值水平和/或小于第二阈值水平时,利用速率信息阻止流体输送单元从管嘴发射流体。以这种方式,当例如牙刷的头部移动因移动过快而不能有效地清洁牙间间距时,不发生牙线清洁喷射,同样,如果头部移动过慢,也不会发生牙线清洁喷射,因为这可以导致发射的流体量过大。
22.在一个示例中,由用户接口单元输出的信息包括输出头部的速率大于第一阈值水平和/或小于第二阈值水平的信息。这样,通过适当的反馈,可以教导用户其移动可保持主体(例如牙刷),以及进而具有管嘴的头部过快,导致无法进行有效的牙线清洁,或者类似地,移动可保持主体过慢。因此,这使得用户能够更准确地使用基于流体的牙齿清洁系统。
23.在一个示例中,控制单元被配置为使得流体输送单元能够从具有以下一个或多个适配参数的管嘴发射流体:流体射流的速度、流体喷射的频率、流体射流的持续时间、流体的压力、流体的流速。
24.在一个实施例中,可保持主体包括流体输送单元、至少一个传感器和控制单元。利用该信息,控制单元使得流体输送单元能够在管嘴相对于用户牙齿处于一个或多个特定位置之外的一个位置时、从管嘴发射流体。
25.在另一方面,提供了一种利用基于流体的牙齿清洁系统清洁用户牙齿的方法。该基于流体的牙齿清洁系统包括:可保持主体,可保持主体被配置为被耦接至头部;流体输送单元,流体输送单元被配置为在头部内被耦接至管嘴,管嘴被配置为发射流体;至少一个传感器;以及控制单元。该方法包括:
26.由至少一个传感器向控制单元提供与头部相对于用户牙齿相关的信息,包括与头部相对于用户牙齿的速率相关的速率信息;以及
27.由控制单元利用该信息以使得流体输送单元能够将流体从管嘴发射到用户牙齿上。
28.根据又一方面,提供了一种计算机程序元件,计算机程序元件用于控制如前所述的系统,如果计算机程序元件由处理单元执行,则适用于执行如前所述的方法步骤。
29.根据另一方面,提供了一种计算机可读介质,该计算机可读介质存储有如前所述的计算机程序元件。计算机程序元件例如可以是软件程序,但是也可以是fpga、pld或任何其它合适的数字装置。
30.有利地,上述任意方面的示例以及由上述任意方面提供的益处同样适用于所有其它方面,并且反之亦然。
31.参考下文描述的实施例,上述方面和示例将变得显而易见并且得以阐明。
附图说明
32.下面将参考以下附图描述示例性实施例:
33.图1示出基于牙线的牙齿清洁系统示例的示意性设置;
34.图2示出利用基于牙线的牙齿清洁系统清洁用户牙齿的方法;
35.图3示出混合式牙线和牙刷的示例;
36.图4示出在操作中的混合式牙线和牙刷的示例;
37.图5示出示例性混合式牙线和牙刷系统的操作部件相互作用的详细示例;
38.图6示出针对图5的示例性系统的示例性牙线清洁和刷洗例程;
39.图7示出示例性混合式牙线和牙刷系统的操作部件相互作用的详细示例;
40.图8示出针对图7的示例性系统的示例性牙线清洁和刷洗例程;
41.图9示出示例性移动传感器;
42.图10示出作为流体速率函数的示例性清洁时间;以及
43.图11示出作为流体速率函数的示例性牙刷头最大移动速率。
具体实施方式
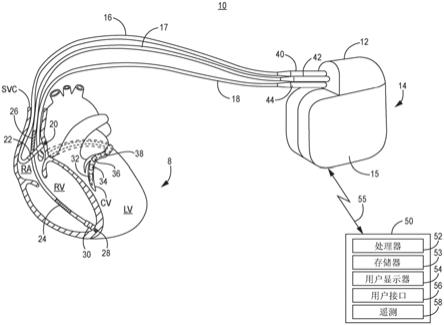
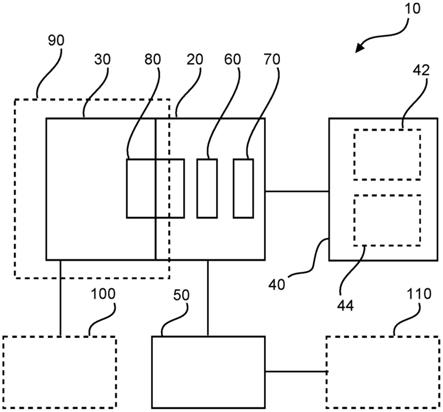
44.图1示出基于流体的牙齿清洁系统10的示例。该系统包括可保持主体20、流体输送单元30、至少一个传感器40、以及控制单元50。可保持主体20被配置为被耦接至头部60。头部60可以可选地具有刷毛70,或者可选地具有橡胶垫、泡沫、抛光片、或除了流体牙线清洁外提供牙齿清洁的其它适当清洁元件。因此,可选地,系统10可以是基于流体的混合式牙刷清洁系统。流体输送单元30被配置为耦接至管嘴80,管嘴80被配置为发射流体,并且管嘴80包含在头部60内。至少一个传感器40提供可保持主体20的与头部相对于用户牙齿相关的信息。利用该信息,控制单元50使得流体输送单元能够将流体从管嘴发射到用户牙齿上。根据本发明,至少一个传感器包括移动传感器44,移动传感器44被配置为确定与头部60相对于用户牙齿的速率相关的速率信息。在一个示例中,移动传感器44包括惯性测量单元。
45.在一个示例中,可保持主体20是牙刷主体。
46.在一个示例中,流体输送单元30被包括在可保持主体20内。在一个示例中,流体输送单元30被包括在可保持主体20的手柄90内。
47.在一个示例中,控制单元50被包括在可保持主体20内。在一个示例中,控制单元50被包括在可保持主体20的手柄90内。
48.在一个示例中,基于流体的牙齿清洁系统10包括被配置为保持流体的贮存器100,并且贮存器100与流体输送单元30流体连通。在一个示例中,贮存器100被包括在可保持主体20内。在一个示例中,贮存器100被包括在可保持主体20的手柄90内。
49.在一个示例中,流体是液体。在一个示例中,流体是气体。在一个示例中,流体是液体/气体混合物。在一个示例中,从管嘴80发射的流体包括流体射流。在另一示例中,从管嘴80发射的流体包括流体喷雾。
50.根据一个示例,控制单元50被配置为使得流体输送单元30能够基于至少一个传感器中一个或多个传感器的输出,调节来自管嘴80的流体流。
51.根据一个示例,控制单元50被配置为使得流体输送单元30能够在头部60位于使得流体被引导而撞击用户牙齿的牙间间隙的位置时、从管嘴80发射流体。
52.在一个示例中,控制单元50被配置为使得流体输送单元30能够在头部60位于使得流体被引导而撞击用户牙齿的牙龈线的位置时、从管嘴80发射流体。
53.根据一个示例,系统包括用户接口单元110。控制单元50被配置为控制用户接口单元110以向用户输出关于头部60移动的信息。
54.在一个示例中,用户接口单元110被包括在可保持主体20内。
55.在一个示例中,用户接口单元110被包括在远程设备120内。在一个示例中,远程设备120是以下中的一项:移动电话、平板电脑、计算机、远程服务器。
56.在一个示例中,向用户输出的信息包括听觉信号。在一个示例中,听觉信号从可保持主体20发射。在一个示例中,听觉信号由远程设备120发射。
57.在一个示例中,向用户输出的信息包括触觉信号。在一个示例中,触觉信号与可保持主体20的振动相关。在一个示例中,触觉信号与远程设备120的振动相关。
58.在一个示例中,向用户输出的信息包括视觉信号。在一个示例中,视觉信号与可保持主体20的至少一部分发射的彩色光相关。在一个示例中,视觉信号与由远程设备120的屏幕130发射的彩色光相关。
59.根据一个示例,控制单元50被配置为利用与头部60相对于用户牙齿相关的信息,在头部60位于使得流体将被引导而撞击用户牙齿表面的位置时,阻止流体输送单元30从管嘴80发射流体。
60.根据一个示例,至少一个传感器40包括位置传感器42,位置传感器42被配置为确定与头部60相对于用户牙齿相关的位置信息。
61.根据一个示例,位置信息包括与头部60何时位于使管嘴80被定位为邻近于用户牙齿的牙间间隙的位置有关的信息。
62.根据一个示例,位置信息包括与头部60何时位于使管嘴80被定位为邻近于用户牙齿的牙龈线的位置有关的信息。
63.在一个示例中,位置传感器42包括流体压力传感器。
64.根据一个示例,控制单元50被配置为利用位置信息确定第一牙间间隙的位置,并且利用速率信息确定已经移动远离该位置的头部60何时回到该位置。控制单元50被配置为激活流体输送单元30,以在头部60已经回到第一牙间间隙的位置时从管嘴80发射流体。
65.根据一个示例,控制单元50被配置为利用位置信息确定第一牙间间隙的位置,并且利用速率信息确定头部60何时移动至与第一牙间间隙邻近的第二牙间间隙的位置。控制单元50被配置为在头部60位于第二牙间间隙时,激活流体输送单元30以从管嘴80发射流体。
66.根据一个示例,控制单元50被配置为利用速率信息以在头部60的速率大于第一阈值水平和/或小于第二阈值水平时、阻止流体输送单元30从管嘴80发射流体。
67.根据一个示例,由用户接口单元110输出的信息包括输出头部60的速率大于第一阈值水平和/或小于第二阈值水平的信息。
68.在一个示例中,该信息包括听觉、触觉和/或视觉信号。在一个示例中,与第一阈值相关的信号不同于与第二阈值相关的信号。
69.根据一个示例,控制单元50被配置为使得流体输送单元30能够从具有以下一个或多个适配参数的管嘴80发射流体:流体射流的速度、流体喷射的频率、流体射流的持续时间。
70.在一个示例中,可保持主体20包括流体输送单元30、至少一个传感器40和控制单元50。控制单元50被配置为利用该信息、以使得流体输送单元30能够在管嘴80相对于用户牙齿处于一个或多个特定位置之外的一个位置时,从管嘴80发射流体。
71.图2示出在基本步骤中使用基于流体的牙齿清洁系统10清洁用户牙齿的方法200。方法200包括:
72.在提供步骤210中,至少一个传感器40、44提供与头部60相对于用户牙齿相关的信息,包括与头部60相对于用户牙齿的速率相关的速率信息;
73.在提供步骤220中,至少一个传感器40、44向控制单元提供上述信息;以及
74.在利用步骤230中,由控制单元50利用该信息使得流体输送单元30能够将流体从管嘴30发射到用户牙齿上。
75.在一个示例中,利用步骤230包括:由控制单元50利用该信息以使得流体输送单元30能够在头部60位于使得流体被引导而撞击用户牙齿的牙龈线的位置时、从管嘴80发射流体。
76.在一个示例中,基于流体的牙齿清洁系统10包括用户接口单元110,并且在利用步骤230中,控制单元50控制用户接口单元110向用户输出关于头部60移动的信息。
77.在一个示例中,利用步骤230包括:控制单元50利用该信息在头部60位于使得流体将被引导而撞击用户牙齿表面的位置时、阻止流体输送单元30从管嘴80发射流体。
78.在一个示例中,利用步骤230包括:由控制单元50利用位置信息确定第一牙间间隙的位置,并且利用速率信息确定已经移动远离该位置的头部60何时回到该位置,并且其中在头部60回到第一牙间间隙的位置后,控制单元50激活流体输送单元30以从管嘴发射流体。
79.在一个示例中,利用步骤230包括:由控制单元50利用位置信息确定第一牙间间隙的位置,并且利用速率信息确定头部60何时移动至与第一牙间间隙邻近的第二牙间间隙的位置,并且其中在头部60位于第二牙间间隙时,控制单元50激活流体输送单元30以从管嘴80发射流体。
80.在一个示例中,利用步骤230包括:在头部60的速率大于第一阈值水平和/或小于第二阈值水平时,控制单元50利用速率信息阻止流体输送单元30从管嘴80发射流体。
81.在一个示例中,利用步骤230包括:用户接口单元110输出关于头部60的速率大于第一阈值水平和/或小于第二阈值水平的信息。如上所述,该信息可以包括听觉、触觉和/或视觉信号,并且与第一阈值相关的信号可以不同于与第二阈值相关的信号。
82.现在参考图3至图11并且结合具体的详细实施例,另外详细地描述基于流体的牙齿清洁系统10和用户牙齿的相关清洁方法。这里,具体实施例涉及一种基于流体的混合式机械牙齿清洁系统,其中喷射管嘴位于牙刷的头部内,具有例如刷毛。然而,应当理解的是,喷射动作不一定与具有刷毛的牙刷相关联,并且可以用作独立的射流式牙线清洁设备。因
此,这里描述的实施例涉及一种特定实施例类型。
83.图3至图4示出示例性的基于流体的混合式机械牙齿清洁系统,其也可以称为混合式牙线和牙刷。本发明涉及一种具有刷牙和牙间间隙牙线清洁组合功能的口腔清洁设备,其使用液体(例如水)或气体(例如空气)或两者混合物形式的流体。当专门针对牙间间隙时,流体喷射动作大大改善。例如,如us9987109和/或us9814302中描述的传感器系统可以用于确定牙间间隙的位置。在刷洗例程期间,牙齿表面的不同侧面(例如颊侧、舌侧和咬合侧)得到清洁。将刷洗和喷射冲洗组合在一个设备中能够到达牙间间隙的颊侧和舌侧,从而能够改善牙间清洁。例如在wo2017/002004a1、wo2017/001399a1、wo2017/002012a1和wo2016/174621a1中描述了用于确定牙刷头相对于用户牙齿的位置(位置和取向)的传感器。
84.在这里描述的刷洗和牙线清洁组合式设备的一个示例中,当使用如上所述的传感器装置检测到牙间间隙或牙龈线时,发生流体输送,并且管嘴出口面向牙间间距或牙龈线。附加地,如果用户移动牙刷过快,例如在擦洗期间,检测
‑
喷射回路禁止射流发射,因为此时管嘴已经移动至另一不同位置,不再面对牙间间距或牙龈线。因此,在具有牙线清洁和刷洗组合或混合功能的电动牙刷中,设置自动喷射系统,当管嘴指向牙间间隙和牙龈线时,自动喷射系统利用牙刷中的运动测量传感器自动喷射,运动测量传感器是加速度计的形式,用于测量设备相对于牙弓的速度。一旦设备超过阈值刷洗速度/加速度,就中断流体喷射动作,进而停止泵的泵送或关闭阀,因为这种移动期间的喷射是无效的。同样,当牙刷的速度降低时,液体流速也随之降低。当牙刷的速度过低时,清洁仍然是有效的,但代价是过多液体被注入口腔中,因此,当牙刷头速度下降至阈值以下时,喷射动作再次中断。换句话说,可以根据刷头的速度调节液体流速。
85.图5示出示例性的基于流体的混合式机械牙齿清洁系统(混合式牙线和牙刷系统)的操作部件相互作用的详细示例。总的来说,该系统具有控制回路,其中检测/测量刷洗运动并将其作为输入参数用于关闭/开启喷射模式(打开/关闭阀)。在该实施例中,如果超过刷洗速度上限或刷洗速度低于一定阈值,则发生喷射中断。因此,当检测到牙刷的移动/牙刷的速度在刷洗速度极限之外时,停止连续喷射。在图5中,储水器
‑
泵
‑
阀
‑
管嘴的箭头对应于流体流路径,加速度计
‑
微处理器和阀的状态逻辑的箭头对应于传感器信号路径。应当注意的是,所示布置仅仅是第一个示例性实施例,并且例如泵可以在没有阀的情况下经由例如突发操作模式由微处理器和功率控制器直接调节。
86.如图5所示,混合式牙线清洁/牙刷系统包括泵、储水器、运动传感器功能(加速度计)、微处理器和阀。喷射功能也被集成在设备中(包括但不限于储水器、泵、管道、管嘴和阀),这有助于改善清洁体验。为喷水系统设置反馈回路,喷水系统在达到一定刷洗速度后停止,并且在速度回到较低水平后重新喷射,加速度计测量牙刷的速度/移动。阀可以经由微处理器控制。图6示出反馈回路的操作,图中示出示例性牙线清洁和刷洗例程,其中当牙刷移动得过快或过慢时,关闭牙线清洁喷射。另外,如上所述,即使是牙刷在正确的速度阈值内移动时,牙线清洁喷射也仅在管嘴指向牙间间距或牙龈线时发生。在图6所示的牙线清洁和刷洗例程中,示出了典型的两分钟口腔卫生清洁期。设备每30秒给出一个听觉信号,使得用户切换象限(牙刷将快速移动)。这可以通过曲线图中刷洗速度的峰值(上方实线)和喷射停止(下方实线)看出,刷洗速度的峰值使得阀在速度超过阈值时关闭。一旦速度落入边
界条件内,则阀再次打开并继续喷射。然而,如果牙刷速度过低,阀同样关闭。
87.此外,一旦移动过快并且阀关闭,则向用户提供的反馈是听觉噪声(蜂鸣声)、光信号、软件反馈(例如应用内信号)或振动。当达到最佳速度时,向用户提供另一信号,以鼓励用户继续保持该速度。当速度过慢时,向用户提供另一信号。这个特征将教导和/或指导用户改善其刷洗行为。牙刷中还存在听觉、擦洗和应用内反馈。
88.图7示出示例性混合式牙线和牙刷系统的操作部件相互作用的详细示例。总的来说,该系统具有自适应控制回路,其中检测/测量刷洗运动,并将其作为输入参数,用于调节泵的喷射设置(速度、脉冲持续时间等)。因此,喷射速度或脉冲频率与增加的刷洗运动相适应。在图7中,储水器
‑
泵
‑
阀
‑
管嘴的箭头对应于流体流路径,加速度计
‑
微处理器和泵/阀的状态逻辑的箭头对应于传感器信号路径。在该系统中,流体喷射速度或流量(流速)被调节为刷洗速度,以适应改进的清洁过程。牙刷的移动可以用作输入以调节喷射速度:牙刷移动得越快,喷射发生得越快。这可以通过使用自适应控制回路来实现,自适应控制回路包括适当的控制器(如果需要更大稳定性的话,例如比例控制器或pid控制器)和擦洗运动传感器。再次,如果移动过快,则喷射将停止。对微处理器进行编程,使其不仅能够决定是否需要关闭阀,还能根据牙刷的移动速度调节射流速度。同样,所示布置仅仅是第一个示例性实施例,并且例如泵可以在没有阀的情况下经由例如突发操作模式由微处理器和功率控制器直接调节。
89.图5和图7的系统可以具有相同的结构特征,其中微处理器被不同地编程,或者能够在操作模式之间切换。
90.图8示出反馈回路的操作,图中示出示例性牙线清洁和刷洗例程。示出了典型的两分钟口腔卫生清洁期。设备每30秒给出听觉信号,使得用户切换象限。这可以通过曲线图中刷洗速度的峰值看出,当超过阈值时,刷洗速度的峰值使得阀关闭并且喷射停止。关于喷射速度,牙刷移动得越快,则射流喷射越快。一旦牙刷速度在上下阈值范围内,则阀再次打开并且继续喷射。牙刷移动得越快,喷射发生得越快。因为到达牙间间隙的时间越短,牙间清洁就越有效和高效。
91.然而,有两个因素对快速刷洗运动期间的正确喷射造成了挑战:
92.·
牙缝传感器响应太慢;
93.·
喷射程序激活时间过长。
94.例如,使用上述传感器技术可以检测牙间或牙缝间隙或牙龈线,但是在确认检测和/或喷射单元由于刷头的移动而准备好喷射流体之前,喷射尖端或管嘴可能已经移动超过牙缝间隙,导致喷射无效。
95.因此,除了上述解决方案之外,在擦洗期间仍可以激活改进的喷射形式。这包括利用先前的牙间间隙检测——结合牙刷的移动速度,将喷射突发设定在到达下一牙缝间隙的时刻。以这种方式,可以在至少一些牙缝间隙执行至少一些有效的喷射。如果牙刷仅沿一个方向移动,则在擦洗开始后,可能会错过第一牙缝间隙,但如果检测到牙间间隙,则当用户前后移动牙刷时,管嘴可以回到先前检测到的牙间间隙并喷射。
96.因此,操作可以总结如下:
97.·
以下述速度检测擦洗:该速度对于当前牙缝间隙的牙缝感测过快,但是落入能够发生有效喷射的范围内;
98.·
装置切换为暂停对第一牙缝间隙喷射的模式;
99.·
在牙缝间隙感测完成后,引入延迟,在该延迟之后激活喷射。
100.因此,在下一牙缝间隙的位置处发生喷射。延迟由探针从感测点(超出第一牙缝间隙)移动至下一间隙所需的时间来定义。这由擦洗速度(已经测量)和牙缝间隙的间距来定义。在一个简单的实施例中,后者可以直接是平均牙缝间距(大约7mm
‑
8mm)。然而,该系统可以考虑牙刷在口腔中的位置,以限定牙缝间距(对于臼齿来说更大)。在又一系统中,牙缝间隙的反复测量可以用于进一步使延迟个性化,例如使用间隙感测来精确地定义在口腔中的位置、牙刷在哪里移动以及进而到下一牙缝间隙的延迟。
101.如上所述,牙刷头的移动和速度是用于确定何时喷射和何时不喷射的输入,另一输入是牙间间距的位置。以下讨论提供了关于这些输入的更多信息。
102.应当注意的是,当超过流体喷射的特定阈值速率时,生物膜清洁更加有效。该阈值速率取决于生物膜的强度,但在20m/s至30m/s的量级,并且应当注意的是,牙缝区域中的生物膜的强度低于牙齿本身,因而更容易去除。因此,除了在指向牙间间距时喷射以及在牙刷头移动过快或过慢时打开/关闭之外,系统还包括泵和以突发模式操作的装置。泵以一定频率操作多个循环,然后关闭,并且以这种方式调节平均流速。此外,如上所述,喷射速度可以考虑刷头相对于牙齿移动的速度。
103.关于对混合式牙线和牙刷头部的移动感测,用于确定头部的方向和/或速度,进而确定包含在头部中的管嘴(流体输送点)相对于牙齿的方向和/或速度的传感器优选是非接触式的,即牙齿与实际传感器之间不存在物理接触。测量管嘴的方向以及可选地测量管嘴的速率有几种选择。这些选择是:
104.‑
加速度计。该加速度计被放置在管嘴或管中,但也可以放置在手柄中,靠近手的位置。
105.‑
光学成像设备,诸如用于光学鼠标。光学鼠标传感器优选设置在管嘴中,或者也可以设置在手柄中。
106.‑
光学相关器,诸如利用自混合干涉和/或多普勒效应的激光传感器。
107.‑
传感器,传感器由管嘴底部部分相对于地板的移动触发。
108.此类传感器的一个示例如图9所示。pcb上包括两个导体滚珠,类似于熨斗中使用的自动断电装置中的滚珠。滚珠用于测量作为瞬时脉冲的加速度是否存在。由于狭缝具有椭圆形形状,滚珠必须向上移动到pcd所在平面之外以侧向移动。通过调整狭缝的形状,可以微调触发接触所需要的加速度。这样,提供了简单的运动传感器。微处理器解读切换动作以确定管嘴的方向和速率。如果需要,可以通过例如使用开关或应变计,仅检测运动而不检测速率。这用于识别一个简单的运动传感器,其中可以利用加速度计/陀螺仪等。
109.泵是活塞泵,其中工作频率在10hz至100hz的范围内,更优选地在20hz至60hz的范围内。喷射单元的管嘴可以位于刷头上的不同位置,在中部(刷毛之间)、前方(刷毛外侧)或后方,在这种情况下,当使用流体时,可以需要扭转刷头。还应当注意的是,流体配液可以仅包括液体,或者液体和气体的组合,并且其中液体可以是水。如上所述,利用感测技术来确定管嘴相对于牙齿的牙缝区域的位置。
110.除了中断喷射之外或作为中断喷射的备选,可以向用户提供反馈,使其能够改进自己的刷牙方案,从而更好地清洁牙齿。当牙刷的移动速度过快或过慢时,可以以几种方式
向用户提供反馈。由类似于移动电话的带偏心装置的小马达产生振动,或者备选地,可以使用手柄中的变色光环(例如,红色指示过快或过慢,绿色指示在泵能够处理的范围内,能够以最小水损耗进行有效清洁)。
111.关于混合式牙线和牙刷系统的移动,存在最大速度阈值,在超过该最大速度阈值时停止水喷射,该最大阈值可以如下文详述地计算。如下文所述,流速可以根据移动速度调整。可以任意地计算或设置更低的速度阈值。
112.已知生物膜的去除与总液体动量p
tot
成比例,因此
113.v
bf
=a
bf
·
h
bf
≈k
·
p
tot
114.这里,abf是除去的生物膜面积,hbf是除去的生物膜厚度,≈100μm,k是指示生物膜强度的常数,估计的牙缝牙菌斑强度k≈1
·
10
‑
7kg
‑
1m2s,前牙上的硬牙菌斑强度≈1
·
10
‑
8kg
‑
1m2s。总动量可以写作
115.p
tot
=vm1=v
·
ρ1·
q1·
t
tot
116.其中v是平均液体速率(为了简单起见,假设随时间恒定),实际上该速率随时间变化,ρl是液体密度,ql是流速,ttot是液体沉积在abf上沉积的总时间。
117.对于喷射式设备,可以使用以下公式
118.q1=a
j
·
v=π/4d
2 v
119.当射流固定在一个位置时,清洁面积与喷射面积aj是同一量级,喷射面积由射流直径d决定。对于喷射型系统,适用以下公式abf=f
·
aj。其中f是大于1的因子,从上述公式中可以看出,当管嘴保持固定时,可以推导出去除所有生物膜的典型时间。
120.t
tot
=f
·
h
bf
/(k
·
ρ1·
v2)
121.图10中描绘了在牙缝牙菌斑k≈1
·
10
‑7kg
‑1m2s的情况下,射流区域的清洁时间,并且应当注意的是,这些时间非常短,即该区域相对易于清洁。应当注意的是,射流与喷雾之间的差异将是,因子f将增加为40至80之间的非常大的值,导致清洁时间更长,但是仍然相对较短,即0.2秒内。
122.典型地,水与特定污点的接触时间为以下量级:
123.t
con
≈d
c
/u
124.为了一次性完成清洁,接触时间需要大于清洁污点所需要的时间。因此,从上述公式中可以导出能够用于清洁单个污点的最大速率值。
125.注意,d
cl
=√f
·
d
126.u<d.k.ρ
l
v2/(√f
·
h
bf
)
127.图11示出针对不同的平均液体速率和清洁分数的最大速率,其中管嘴直径d为0.8mm且k=1
·
10
‑7kg
‑1m2s。对于射流,即小f,可以看出最大允许u相当大(例如对于v=20m/s且f=5,为0.14m/s)。
128.应当注意的是,对于喷雾f≈40
‑
100,清洁将花费更长时间,因此清洁所需的最大速率必须小于射流在基材上移动的典型速率,并且因此,如果用户不降低手柄速率,则无法获得最佳清洁。
129.然而,上述分析示出了如何计算移动阈值速度上限,当超过该移动阈值速度上限时,应停止喷射,即使管嘴射流指向牙间间隙或牙龈线。
130.在另一示例性实施例中,提供了一种计算机程序或计算机程序元件,其特征在于,
被配置为在适当系统上执行根据前述实施例之一的方法步骤。
131.计算机程序元件可以因此被存储在计算机单元上,诸如智能电话、膝上型计算机、平板电脑或诸如牙刷的口腔清洁设备中的计算机单元,其也可以是实施例的一部分。该计算单元可以被配置为执行或导致执行上述方法的步骤。此外,该计算单元还可以被配置为操作上述系统的部件。计算单元可以被配置为自动操作和/或执行用户的命令。计算机程序可以被加载至数据处理器的工作存储器中。因此,数据处理器可以被配备为执行根据前述实施例中的一个实施例的方法。
132.本发明的该示例性实施例涵盖了从一开始就使用本发明的计算机程序,并且通过更新将现有程序变成使用本发明程序的计算机程序。
133.此外,计算机程序元件可以能够提供所有必要步骤以实现上述方法的示例性实施例的程序。
134.根据本发明的另一示例性实施例,提出了一种计算机可读介质,诸如cd
‑
rom、usb记忆棒等,其中计算机可读介质具有存储在其上的计算机程序元件,该计算机程序元件如前述部分所述。
135.计算机程序可以被存储和/或分布在适当介质上,如与其它硬件一起提供或作为其它硬件一部分的光存储介质或固态介质,但也可以以其它形式分布,诸如经由网络或其它有线或无线远程通信系统。
136.然而,计算机程序也可以通过网络呈现,如万维网(world wide web),并且可以从此类网络下载至数据处理器的工作存储器中。根据本发明的另一示例性实施例,提供了一种用于使计算机程序元件可用于下载的介质,该计算机程序元件布置为执行根据本发明的前述实施例之一的方法。
137.必须要注意的是,结合不同主题对本发明的实施例进行了描述。特别地,一些实施例结合方法类权利要求进行描述,另一些结合装置类权利要求进行描述。然而,本领域技术人员将从以上和以下描述中认识到,除非另有说明,否则除属于一种类型的主题的特征的任意组合之外,与不同主题相关的特征之间的任意组合也被认为是与本技术一起公开的。然而,如果协作效果优于特征的简单叠加,所有特征都可以进行组合。
138.虽然附图和以上描述中已经详细说明并且描述了本发明,但是这些说明和描述应该被视为说明性或示例性的,而非限制性的。本发明不限于所公开的实施例。在实践所要求保护的发明的过程中,通过学习附图、公开内容及所附权利要求,本领域技术人员对于所公开实施例的其它变型是可以理解并实现的。
139.在权利要求中,“包括”一词不排除其它元件或步骤,不定冠词“一”或“一个”不排除多个。单个处理器或其它单元可以满足权利要求中所述的多项功能。某些措施被记载在互不相同的从属权利要求中的事实不指示这些措施的组合不能被用于获得优势。权利要求中的任何附图标记不应被理解为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。