1.本发明涉及深海高速侵彻试验技术领域,特别涉及一种深海环境高速侵彻试验装置和方法。
背景技术:
2.随着国际局势和地区局势的不断发展,我国的海洋权益和海洋安全不断地受到挑战。由于世界军事科技的发展和提升,水下高速武器也在迅猛发展,高速侵彻逐渐成为潜艇和船舶等装备以及水下设施的重要威胁。在此形势下,研究深海环境下的高速、超高速侵彻及作用机理,对提升我国相关水下设施和装备的安全至关重要,对发展我国的水下超高速武器也大有裨益。
3.目前,对于水下冲击的非爆炸加载相关技术的研究较为成熟,国内外也出现了大量的相关装置。但是,这些装置仅能模拟深海水下附加冲击波作用下,备气、背水等工况下的力学性能,不能实现侵彻这种直接接触碰撞的模拟。另外,国内外也有部分关于高速弹体入水模拟试验的装置和相关试验方法,但基本上都是针对常规大气压下,高速弹体射入水槽等工况,未能有效考虑深海环境下的高水压。因此,现有的相关技术难以满足深海环境下,水下目标在超高水压和超高速侵彻耦合作用下的破坏机理研究。
技术实现要素:
4.本发明的主要目的是提出一种深海环境高速侵彻试验装置和方法,旨在模拟深海环境中,目标在超高水压和超高速侵彻耦合作用下的破坏过程。
5.为实现上述目的,本发明提出一种深海环境高速侵彻试验装置,包括:
6.模拟舱,所述模拟舱内部限定有试验空间,试验空间包括用于放置靶体的可封闭侵彻区、以及前端与侵彻区通连的飞行区,飞行区的前端设有第一脆性耐静压薄膜,以将侵彻区和飞行区密封分隔;
7.水压机,用于对侵彻区注水并加压,以模拟超高水压的深海环境;
8.加速器,所述加速器与飞行区的后端通连,用于驱使弹体沿试验空间超高速飞向靶体;
9.第一自动阀门,设在飞行区位于第一脆性耐静压薄膜后侧的位置,当弹体通过第一自动阀门并击穿或者即将击穿第一脆性耐静压薄膜时,第一自动阀门快速关闭,以将飞行区位于第一自动阀门前后两侧的空间密封隔断;
10.测速装置,用于测量弹体即将撞击靶体时的侵彻速度;
11.高速摄像机,用于记录和重构靶体受到侵彻和破坏的过程;以及
12.应力应变传感器,所述应力应变传感器设于靶体,用于记录靶体的应力、应变变化情况。
13.为实现上述目的,本发明还提出一种深海环境高速侵彻试验方法,包括如下步骤:
14.s1、根据试验要求,通过水压机往侵彻区注满水并加压至所需超高水压;
15.s2、在确保弹体至靶体的空间可行的情况下,通过加速器驱使弹体沿试验空间飞行,以超高速击穿第一脆性耐静压薄膜后撞击靶体,并通过高速摄像机记录和重构靶体受到侵彻和破坏的过程、通过测速装置测量弹体的侵彻速度、以及通过应力应变感应器记录靶体的应力、应变变化情况。
16.本发明深海环境高速侵彻试验装置和方法,在模拟舱内部限定有包括侵彻区和飞行区的试验空间,并设置有可对侵彻区注水并加压的水压机,以在侵彻区内模拟出超高水压的深海环境。同时在飞行区的前端处前后设置有第一脆性耐静压薄膜和第一自动阀门,当弹体通过第一自动阀门并击穿或者即将击穿第一脆性耐静压薄膜时,第一自动阀门可快速关闭,以将飞行区位于第一自动阀门前后两侧的空间密封隔断,从而能较好地保证侵彻区的密封性以及其内超高水压的稳定性。最终能较好地模拟深海环境中,目标在超高水压和超高速侵彻耦合作用下的破坏过程,以供进行相应破坏机理的研究。
附图说明
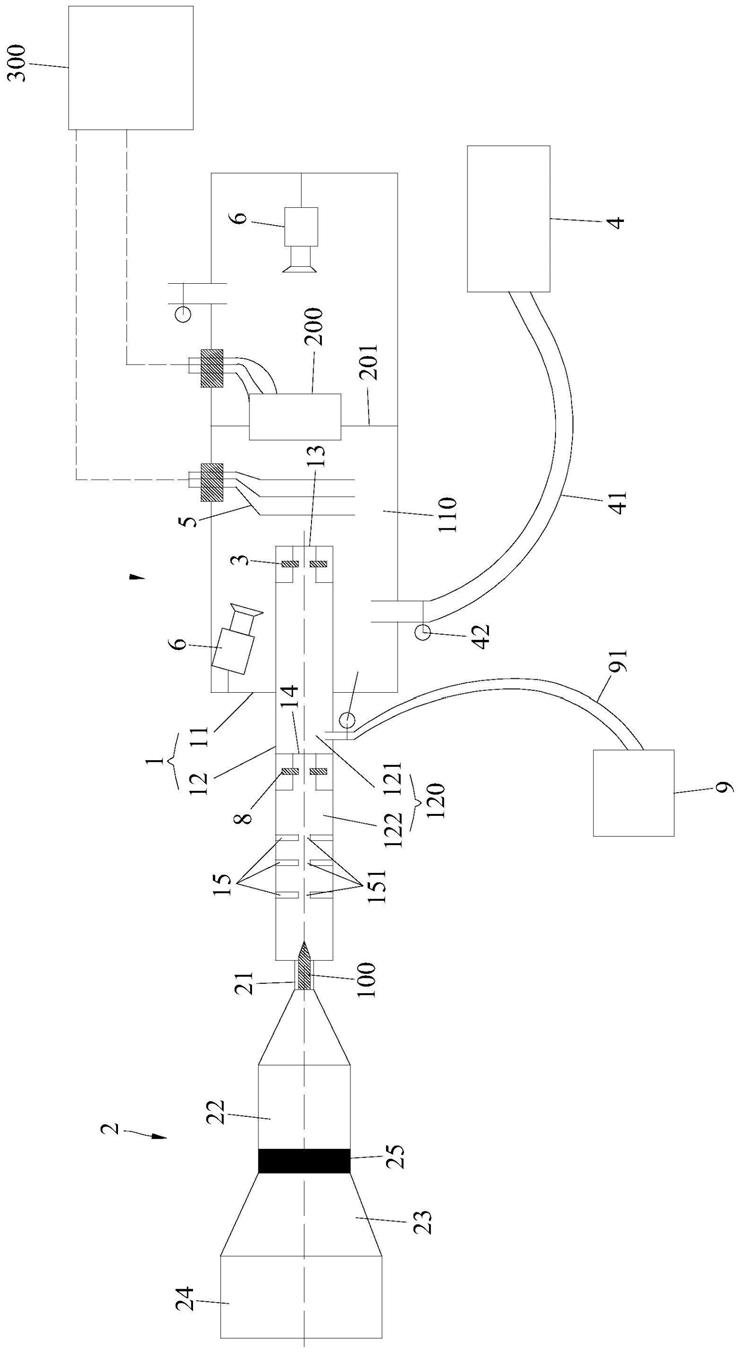
17.图1为本发明的纵向剖视图;
18.图2为舱体、高速摄像机、靶体以及第一自动阀门等的装配示意图;
19.图3为应力应变传感器与靶体的连接示意图。
具体实施方式
20.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后、顶、底、内、外、垂向、横向、纵向,逆时针、顺时针、周向、径向、轴向
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
22.另外,若本发明实施例中有涉及“第一”或者“第二”等的描述,则该“第一”或者“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
23.本发明提出一种深海环境高速侵彻试验装置。
24.在本发明实施例中,如图1至3所示,该深海环境高速侵彻试验装置,包括模拟舱1、加速器2、第一自动阀门3、水压机4、测速装置5、高速摄像机6和应力应变传感器7。
25.其中,模拟舱1内部限定有试验空间,试验空间包括用于放置靶体200的可封闭侵彻区110、以及前端与侵彻区110通连的飞行区120,飞行区120的前端设有第一脆性耐静压薄膜13,以将侵彻区110和飞行区120密封分隔。水压机4用于对侵彻区110注水并加压,以模拟超高水压的深海环境。所述加速器2与飞行区120的后端通连,用于驱使弹体100沿试验空
间超高速飞向靶体200,使弹体100最终撞击靶体200。第一自动阀门3设在飞行区120位于第一脆性耐静压薄膜13后侧(这里将第一脆性耐静压薄膜13朝向向靶体200的方向为前方,反之为后方)的位置,当弹体100通过第一自动阀门3并击穿或者即将击穿第一脆性耐静压薄膜13时,第一自动阀门3快速关闭,以将飞行区120位于第一自动阀门3前后两侧的空间密封隔断,从而能较好地保证侵彻区110的密封性以及其内超高水压的稳定性。最终能较好地模拟深海环境中,目标在超高水压和超高速侵彻耦合作用下的破坏过程。测速装置5用于测量弹体100即将撞击靶体200时的侵彻速度,高速摄像机6用于记录和重构靶体200受到侵彻和破坏的过程,所述应力应变传感器7设于靶体200,用于记录靶体200的应力、应变变化情况,以供进行相应破坏机理的研究。
26.应当说明的是,上述超高速和超高水压在深海环境撞击试验中属于所属领域技术人员所熟知的技术术语,超高速一般为1~6km/s,超高水压一般可达30mpa。弹体100采用金属材料制成,一般包括弹丸(未图示)和弹托(未图示),弹丸的直径小于弹托。
27.具体地,所述测速装置5测量的侵彻速度、高速摄像机6记录和重构靶体200受到侵彻和破坏的过程以及应力应变传感器7记录靶体200的应力、应变变化情况可在试验结束后通过数据获取装置进行获取;也可以在试验过程中,通过数据线或者通过无线通讯模块(如wifi通信模块、gprs通信模块或者蓝牙通信模块等)将数据获取装置300(如计算机)与测速装置5、高速摄像机6和应力应变传感器7连接,并进行实时获取以及数据分析,通过数据线传输获取的方式,如需进入侵彻区110等需保证密封性的空间时,进入处最好进行相应的密封处理,避免因进入处出现漏水或者漏气而影响试验精度。
28.在本发明实施例中,所述测速装置5有多种实施方式。在一较佳实施例中,所述测速装置5为设在侵彻区110位于靶体200前方位置的电磁感应测速装置,电磁感应测速装置通电后,其两个测速感应线圈(未图示)会在弹体100通过的区域产生相应的磁场,当弹体100通过磁场时会给磁场带来波动,并利用两个测速感应线圈的距离和波动先后时间间隔计算得出弹体100的侵彻速度。可以理解地,电磁感应测速装置为现有技术并被本领域的技术人员所熟知,这里不对其具体结构以及工作原理进行赘述。
29.在另一实施例中,测速装置5为设在侵彻区110位于靶体200前方位置的超高速摄像机(未图示),超高速摄像机可记录弹体100接近靶体200过程的运动轨迹,以供根据该超高速摄像机连续记录的运动轨迹图像计算分析弹体100的侵彻速度。
30.在本发明实施例中,加速器2可以有多种实施方式,例如可采用公开号为“cn 110389010a”的发明专利申请所公开的发射器部分的实施例,也可以采用如下实施方式:
31.在一较佳实施例中,如图1所示,所述加速器2采用固体火药与高压轻气(如氢气或氦气等)混合加速的原理,包括与飞行区120的后端通连的轻气炮管21、与轻气炮管21的前端通连的泵管22、与泵管22的后端通连的速动阀门23,以及与速动阀门23的后端通连的装弹室24,所述弹体100装设于轻气炮管21中,所述泵管22接近速动阀门23的位置设有加压活塞25,泵管22位于加压活塞25和弹体100之间的区域充填有高压轻气(未图示),所述装弹室24内可装设固体炸药(未图示)。点燃装弹室24内的固体炸药后,固体炸药瞬间形成的高温高压气体驱使泵管22内的加压活塞25压缩泵管22内的轻质气体,以使泵管22内的轻质气体的压力急剧增大并驱动弹体100加速运动,直至弹体100离开轻气炮管21并以超高速进入试验空间。
32.具体地,所述轻气炮管21可采用高强度材料(例如高强度树脂、高强度玻璃纤维或者高强度玻璃钢等)制成。
33.在本发明实施例中,高速摄像机6的数量以及设置方式可以有多种实施方式,其中,数量可以为一个或者多个。高速摄像机6可设于模拟舱1外部对应靶体200的位置,也可以设置在侵彻区110内,设于模拟舱1外部时,模拟舱1至少对应侵彻区110的区域采用高强度的透明材料(例如高强度树脂、高强度玻璃纤维或者高强度玻璃钢等)制成。示例性地,如图1、图2所示,高速摄像机6有三个,分别设于模拟舱1内部位于靶体200上方、下方以及前方的位置,高速摄像机6优选超高速水下摄像机。
34.在本发明实施例中,如图1所示,模拟舱1可以为一体成型的结构,也可以为组装式结构,优选组装式结构。示例性地,所述模拟舱1包括后端开口的筒体11以及前部插装于模拟舱1的开口处的管体12,筒体11和管体12的结合处密处理(例如设置密封圈实现密封),所述管体12的内部限定有所述飞行区120,所述筒体11的内部限定有所述侵彻区110。具体地,为了保证密封性且便于装配,管体12的前端伸入侵彻区110,优选延伸至接近靶体200的位置。
35.优选地,所述飞行区120划分成两个前后相连的分区,前分区与后分区的过渡处前后设置有第二脆性耐静压薄膜14和第二自动阀门8,第二脆性耐静压薄膜14与所述第一脆性耐静压薄膜13将前分区封闭,形成稳压分区121,另有增压系统9直接或者通过气管91与稳压分区121通连,用于对稳压分区121输入气体并增压,以使稳压分区121内的气压与侵彻区110的水压平衡。当弹体100未飞向第一脆性耐静压薄膜14时,第一自动阀门3和第二自动阀门8处于开启状态;当弹体100通过第二自动阀门8并击穿或者即将击穿第二脆性耐静压薄膜14时,第二自动阀门8快速自动关闭,以阻止稳压分区121的气体外漏,若第二自动阀门8完全关闭之前,稳压分区121出现气体外漏,增压系统9可自动往稳压分区121增压,以保证稳压分区121内的气压与侵彻区110的水压平衡;同样道理,当弹体100通过第一自动阀门3并击穿或者即将击穿第一脆性耐静压薄膜13时,第一自动阀门3快速自动关闭,以阻止侵彻区110的水进入稳压分区121,从而保证侵彻区110的水压稳定,并保证试验精度。
36.具体地,所述气管91或者气管91与管体的接合处设有第三自动阀门92,以控制气管91与稳压分区121的气路的通断。
37.具体地,所述水压机4通过水管41与侵彻区110通连,必要时,水管41或者水管41与筒体11的结合处设置第四自动阀门42,以控制水管41与侵彻区110的水路的通断。
38.可以理解地,增压系统9可根据自带的压力计或者设于稳压分区121内的压力计检测稳压分区121内的气压,并根据压力计反馈的压力信息决定是否对稳压分区121进行输气增压,以保证稳压分区121内的气压与侵彻区110内的水压大小基本一致。
39.可以理解地,第一自动阀门3和第二自动阀门8如何判断弹体100击穿或者即将击穿第二脆性耐静压薄膜14和第一脆性耐静压薄膜13,可通过设置感应器进行检测的方式,例如在对应第二脆性耐静压薄膜14和第一脆性耐静压薄膜13的位置分别设置光电传感器(未图示),用于感应弹体100是否击穿或者即将击穿第一脆性耐静压薄膜13和第二脆性耐静压薄膜14,而试验装置的控制系统则可根据该光电传感器反馈的感应信号作出是否驱使相应的第一自动阀门3或者第二自动阀门8快速关闭的指令。所述第一自动阀门3和第二自动阀门8均采用现有技术,并可采用相同实施方式,这里不对其具体结构以及工作原理进行
赘述。
40.具体地,所述第一脆性耐静压薄膜13和第二脆性耐静压薄膜14采用玻璃或者铁片等具有一定硬度且相对较脆的材料制成的薄片,当弹体100未撞击其时,其能保证结构的完整性和密封性,而受到超高速飞的弹体100撞击时,则瞬间破碎,使弹体100能以损失极少动能的情况下将其击穿。所述第一脆性耐静压薄膜13和第二脆性耐静压薄膜14可以分别固设(如粘接固定)于第一自动阀门3和第二固定阀门的前端口,也可以分别固设(如粘接固定)于飞行区120的内壁,可以理解地,第一脆性耐静压薄膜13和第二脆性耐静压薄膜14的厚度根据试验需求(例如水压和气压大小)而定设,以保证在弹体100未撞击其时,能保证结构的完整性和密封性,且弹体100能以损失极少动能的情况下将其击穿为佳。
41.进一步地,所述后分区内轴向间隔设置有至少一个阻流板15,阻流板15开设有供弹体100通过的弹道孔151,使后分区形成阻流分区122,以通过阻流板15逐级切断弹体100超高速飞行所携带的尾流,从而尽可能缓解尾流对弹体100飞行稳定性的不良影响,并保证弹体100在飞行过程中的姿态稳定,进而提高试验精度。
42.优选地,所述弹道孔151的孔径略大于弹体100的弹丸直径,但小于弹体100的弹托的大小,弹体100通过弹道孔的过程中,弹托被阻流板15阻挡而与弹丸分离,多而实现机械脱壳,并降低弹体100(这里指脱壳后的弹体100)后续的飞行阻力。
43.应当说明的是,所述管体12可以为一体式结构,也可以为多段拼装的结构,如前分区和后分区为独立并拼装在一起的两段。
44.具体地,如图1所示,所述侵彻区110内固设有托架201,所述靶体200固设于托架201上,应力应变传感器7固设于靶体200表面远离加速器2的一侧。当然,靶体200也可以采用悬浮于水中而不固定的方式。
45.优选地,筒体11的侧壁(优选前侧壁)可成型操作过孔(未图示),并在操作过孔处可拆卸固设有可将操作过孔密封关闭的防护板(未图示)。以在试验前后,进行靶体200、高速摄像机6等的安放以及取出等操作。
46.示例性地,所述靶体200可以为板状、体状、空心球体等多种形式,其上预先布设好足够的所述应力应变传感器7,以根据试验要求,模拟深海环境中不同形状目标在超高水压和超高速侵彻耦合作用下的破坏过程。
47.在介绍了本发明深海环境高速侵彻试验装置的实施方式之后,接下来将对本发明深海环境高速侵彻试验方法的实施方式进行介绍。深海环境高速侵彻试验装置的具体结构见上述实施例,重复之处可不作赘述。
48.在本发明实施例中,如图1至3所示,该深海环境高速侵彻试验方法,包括如下步骤:
49.为实现上述目的,本发明还提出一种深海环境高速侵彻试验方法,包括如下步骤:
50.s1、根据试验要求,通过水压机4往侵彻区110注满水并加压至所需的超高水压;
51.具体地,所述超高水压的具体数值根据试验需求而定,一般而言,该水压机4在侵彻区110内最高可模拟3000m水深,水压达30mpa的深海环境。
52.可以理解地,试验装置、弹体100以及靶体200等安装后,需要对侵彻区110和稳压分区121的密封性进行检测,避免因漏气、漏水而影响后续的试验结果。
53.s2、在确保弹体100至靶体200的空间可行的情况下,通过加速器2驱使弹体100沿
试验空间飞行,以超高速击穿第一脆性耐静压薄膜13后撞击靶体200,并通过高速摄像机6记录和重构靶体200受到侵彻和破坏的过程、通过测速装置5测量弹体100的侵彻速度、以及通过应力应变感应器记录靶体200的应力、应变变化情况,以供后续根据试验获取的数据进行相应破坏机理的研究。
54.具体地,所述测速装置5测量的侵彻速度、高速摄像机6记录和重构靶体200受到侵彻和破坏的过程以及应力应变传感器7记录靶体200的应力、应变变化情况可在试验结束后通过数据获取装置进行获取;也可以在试验过程中,通过数据线或者通过无线通讯模块(如wifi通信模块、gprs通信模块或者蓝牙通信模块等)将数据获取装置(如计算机)与测速装置5、高速摄像机6和应力应变传感器7连接,并进行实时获取以及数据分析,通过数据线传输获取的方式,如需进入侵彻区110等需保证密封性的空间时,进入处最好进行相应的密封处理,避免因进入处出现漏水或者漏气而影响试验精度。
55.具体地,弹体100采用金属材料制成,一般包括弹丸和弹托,弹丸的直径小于弹托。
56.应当说明的是,上述超高速和超高水压在深海环境撞击试验中属于所属领域技术人员所熟知的技术术语,超高速一般为1~6km/s。
57.在本发明实施例中,如图1所示,模拟舱1可以为一体成型的结构,也可以为组装式结构,优选组装式结构。示例性地,所述模拟舱1包括后端开口的筒体11以及前部插装于模拟舱1的开口处的管体12,筒体11和管体12的结合处密处理(例如设置密封圈实现密封),所述管体12的内部限定有所述飞行区120,所述筒体11的内部限定有所述侵彻区110。具体地,为了保证密封性且便于装配,管体12的前端伸入侵彻区110,优选延伸至接近靶体200的位置。
58.优选地,所述飞行区120划分成两个前后相连的分区,前分区与后分区的过渡处前后设置有第二脆性耐静压薄膜14和第二自动阀门8,第二脆性耐静压薄膜14与所述第一脆性耐静压薄膜13将前分区封闭,形成稳压分区121,另有增压系统9直接或者通过气管91与稳压分区121通连,用于对稳压分区121输入气体并增压,以使稳压分区121内的气压与侵彻区110的水压平衡。当弹体100未飞向第一脆性耐静压薄膜14时,第一自动阀门3和第二自动阀门8处于开启状态;当弹体100通过第二自动阀门8并击穿或者即将击穿第二脆性耐静压薄膜14时,第二自动阀门8快速自动关闭,以阻止稳压分区121的气体外漏,若第二自动阀门8完全关闭之前,稳压分区121出现气体外漏,增压系统9可自动往稳压分区121增压,以保证稳压分区121内的气压与侵彻区110的水压平衡;同样道理,当弹体100通过第一自动阀门3并击穿或者即将击穿第一脆性耐静压薄膜13时,第一自动阀门3快速自动关闭,以阻止侵彻区110的水进入稳压分区121,从而保证侵彻区110的水压稳定,并保证试验精度。
59.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
