1.本发明涉及用于船舶和石油平台设备以及建筑物维护的技术。更具体地,本发明涉及机器人自动化涂漆技术。
背景技术:
2.无论以何种方式进行涂漆,对竖直表面涂漆的最先进技术都使用一般遵循使用线缆牵引和悬挂的相同原理的装置。
3.通常,两根机动化线缆拉动装置,使用配重来平衡悬挂的系统的重量;在该领域有许多出版物。作者和发明人patricio gonzalez vivo开发了由两根线缆悬挂的涂漆装置,每根线缆都由位于系统的上部部分的侧部上的马达拉动。线缆在穿过马达时使用配重。所公开的装置通过脚本经由软件控制,并允许将图像绘制到在其上悬挂装置的竖直壁上。该装置通过线缆的直接牵引而移动。他的作品发表在互联网上他自己的主页上,带有视频和建造细节。作者称他的发明为vplotter。
4.名称为arduino xy plotter drawing robot的发明公开了一种由两根线缆悬挂的涂漆装置,每根线缆由位于系统的上部横向部分上的马达拉动。所公开的装置由软件控制,该软件允许将图像绘制到在其上悬挂装置的竖直表面上。悬挂的装置通过拉动支撑它的线缆来移动(也使用配重)。
5.在互联网上可得到和发表的名称为hektor spray robot的发明公开了一种由两根线缆悬挂的涂漆装置,每根线缆由位于系统的上部侧部分上的马达拉动。所公开的装置由软件控制,该软件允许将图像通过喷涂绘制到在其上悬挂装置的竖直表面上。悬挂的装置通过使用配重拉动支撑它的线缆来移动。
6.因此,这种发展适用于通常用于制作图纸和图像的较小的区域,而不是大的金属表面区域的涂漆或涂层。
7.对于大的竖直平坦表面的维护或检查的情况,通过诸如脚手架或攀爬吊带的建筑物接近件来进行。为了涂漆,雇员必须能够接近待涂漆的位置。
8.针对造船,通过脚手架接近,因为工作在干船坞中实施。这种接近是在经济上昂贵且耗时的。此外,它还涉及工作安全风险。
9.存在再现由雇员完成的涂漆类型的需要。这意味着存在一些在进行工作时必须考虑的变量。其中之一是涂漆系统施加涂料的线性方式。被认为最有效的雇员移动通常是直线的(水平或竖直),在端部处停止施加。由于在这些端点处移动反转中的速度为零,涂漆系统可能过度喷涂。为了防止过度喷涂,涂料施加枪机构被停止,直到其恢复到它的正常的施加速度。
10.在目前的系统中,无论其是使用带式线缆、带齿线缆还是带有标记球的线缆的类型,都仍然存在影响系统的移动的间隙的问题。
11.克服此类问题的尝试是给系统增加两条线缆,这导致要考虑一系列新的因素,诸如运动控制、速度参数化和加速度。
12.此外,如果仅使用两个锚定点,诸如在现有系统中,则存在装置摆动并导致线缆之一断裂的巨大风险,并且这种断裂的后果之一是使剩余的锚定点过载,导致装置掉落。
13.如下文将进一步详述的,本发明旨在以实用和高效的方式解决上述现有技术的问题。
技术实现要素:
14.本技术的方法力图使用由受控线缆悬挂的移动平台,允许利用轻质模块化基础设施覆盖大的表面。
15.移动悬挂平台由线缆定位,其中它的悬挂系统放置在行为类似于球体的自由的麦克纳姆轮上。
16.该系统基本上通过线缆工作,线缆将组件保持悬挂在竖直或水平的壁上,在此处组件通过位于轮子上的磁性底座“附连”到壁。
17.在卷绕部段中,提出的系统包含同步串行网络(synchronous serial network)中的伺服马达、超分子量聚乙烯(ultra molecular weight polyethylene)线缆、磁性底座和磁性制动器。
18.覆盖用于检查的大表面需要自动定位基础设施,其典型地安装在工厂处。然而,在船舶船体建造的情况下,这种类型的基础设施很大,以至于在经济上变得不可行。因此,对于这些情况而言,在元件(在这种情况下是船体)上使用可移动的东西。
19.为了在涂漆过程中尽量少干扰障碍物而采用的策略是在下降时不涂漆和在上升时涂漆,使得主要障碍将在该过程中面对,就好像下楼梯一样。
20.移动速度必须使得它满足最低过程速度。该最低速度可能是每小时105平方米左右。
21.轮子和悬挂系统一起设计成使在涂漆过程期间的涂层损失最小化。
22.本发明的提出的实施例的本发明的主要优点是更大的在施加涂层过程中的灵活性、施加层中的均匀性、过程中的速度、控制施加速度的可能性、在其轨迹期间定位施加涂层的点的可能性、在线性移动期间控制扭矩的可能性、将施加角度从
‑
45
°
改变到 45
°
的可能性、将枪调节到待涂层表面的可能性、以及相对于臂的旋转中心调节枪的可能性。
23.涂层施加速度通常在150m2/h至430m2/h之间变化。
24.本发明使得有可能免除在海面上方建造脚手架,同时使更少的工人被涉及并且暴露于危险的条件。然而,安装涂漆平台需要小脚手架。
25.该过程的可靠性更高,因为它保证了均匀的涂料厚度和重复性,此外防止了影响环境的废物。
26.除了石油和天然气行业,该技术也可在土木工程中使用。
附图说明
27.下面呈现出的详细描述参考了附图和它们相应的附图标记。
28.图1示出了由四根线缆悬挂的涂漆平台的布局,每根线缆在位于竖直壁上的卷绕机上。
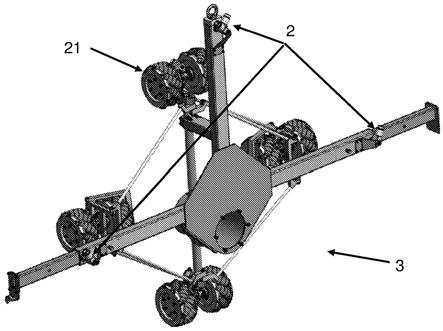
29.图2示出了过程执行器,详细示出了锚定点。
30.图3a至图3f示出了卷绕机细节。
31.图4从侧视图示出了起重机的布局,该起重机将是涂漆平台的锚定点。
32.图5示出了起重机、长颈鹿型起重机(giraffe crane)和涂漆平台。
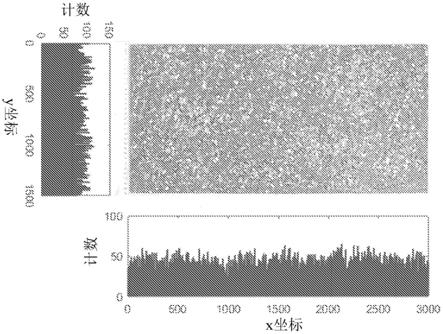
33.图6示出了由两台起重机悬挂的涂漆平台和有效涂漆区域。
具体实施方式
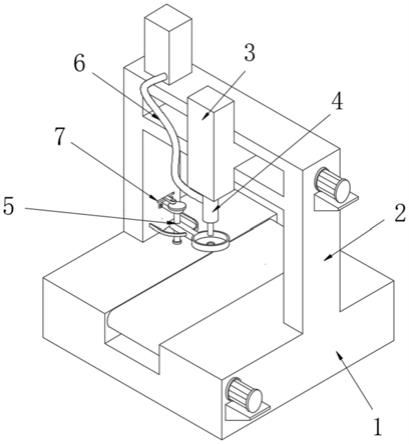
34.本发明的目的是使用一种线缆构造来悬挂移动平台,该移动平台被开发来联接执行涂漆过程的摆动机构,并且还快速且精确地移动以确保船舶船体上的涂漆的质量,但不限于此应用。
35.为了更好地理解本发明,我们将借助于以下描述来说明它,该描述是本发明的优选实施例。然而,对于本领域技术人员来说将显而易见的是,本发明不限于该特定实施例。
36.本发明涉及用于悬挂移动平台(3)的线缆的布置,是新颖的,因为该平台由四根线缆定位,其中它的悬挂系统放置在行为类似于球体的自由“麦克纳姆”轮(21)上。在这种情况下,它具有在甲板高度处的两个固定枢轴和在移动平台的端部处的四个移动枢轴,所述两个固定枢轴将是悬挂被悬挂的移动平台的结构的基础。线缆由独立工作的四个不同的卷绕机(19)控制,所有这些卷绕机都被实时评估以确定在每根线缆上的张力,从而能够实现轨迹的实时校正,同时考虑诸如线缆的弹性、卷绕机的摩擦系数以及系统上负载的变化的因素。
37.旨在接收摆动机构的移动平台(3)必须使用两台起重机(20)通过吊装来安装,因为组件重量为180kg。此外,在船体上的移动平台(3)必须使用长颈鹿型起重机(14)安装。
38.移动悬挂平台(3)由线缆定位,其中它的悬挂系统放置在行为类似于球体的自由的麦克纳姆轮上。
39.图1中所示的原理基于由四根线缆悬挂的移动平台(3)的定位。在这种情况下,它将具有在甲板高度处的两个固定枢轴(1)和在被悬挂的移动平台(3)的端部处的四个移动枢轴(2),所述两个固定枢轴将是悬挂被悬挂的移动平台的结构的基础。该被悬挂的移动平台将承载涂层或涂料施加器臂,具有适合涂漆过程的挥动动力。
40.该被悬挂的移动平台和摆动机构组件(22)将是项目的过程执行器(effectuator)(8)。
41.这六个点的连接(在船体上的两个由(1)表示,在移动平台上的四个由(2)表示)在这种情况下由四根线缆悬挂,这将产生具有两个共存(concurrent)边的三个三角形。因此,两根第一线缆(4)和(5)在投影到船体的2d平面上的相同点处同时从卷绕机1和2中出来,直到这两根移动的线缆在被悬挂的移动平台上枢转。
42.第3“第三”线缆(6)和第4“第四”线缆(7)离开卷绕机3和4的共存点。线缆3(6)到达与线缆2的共存点,并且“第四”点到达被悬挂的移动平台的“第三”悬挂点。
43.卷绕机构(图3a至图3f)是将移动平台定位在壁上的组件。该概念是精密的卷绕机,在卷筒上具有仅一层线缆,并且卷筒的轴向移动由静态梯形主轴拉动。图3a至图3f示出了带有技术细节的卷绕机的尺寸。
44.除了单层卷绕机构之外,卷绕组件还具有负荷传感器(load cell),用于测量施加到线缆的力,并补偿卷绕机和平台之间的自由长度。在控制三个自由度(x、y和a)的四根线
缆的这种冗余运动学解决方案中,该特征是必要的。通过负荷测量,我们将抵消线缆的变形,因为根据工作区域中平台的位置,力变化很大。在该系统的一般尺寸中,线缆上的计算负荷从4n到3545kn变化。最大负荷代表线缆的保证断裂负荷(guaranteed rupture load)的16%。
45.图4以侧视图示出了起重机,用作针对两根线缆的枢轴点。用于线缆机器人的提升机构是包括起重机的组件,具有两个附加的支撑件(10),一个与起重机吊臂(11)对齐,并且另一个倾斜到机器人线缆的侧部,如图5中所示。在这种情况下,工作是在压缩状态下完成的,使得机器人可安装成甚至靠近侧部障碍物,其中起重机的底座和外壳在平台上。起重机具有底座框架,该框架具有用于跨甲板运输到安装点的轮子、用于直接支撑到地板的带螺纹的底脚,从而将轮子提升离开与地面的接触。起重机吊臂(11)使用线缆卷绕机(绞盘)作为配重,因此它将其重量施加到起重机的底座框架的枢轴。底座框架具有集成的控制面板,其在起重机的枢轴的相对侧上充当稳定器,以便将重心带于轮子之间的区域之上。
46.在起重机组件根据图4中所指示的布置预组装的情况下,必须仍然使用轮子定位组件,直到它靠近侧部上的护栏(9)。必须小心平稳地停止组件,因为这种构造的重心较高且向前,几乎超出在吊臂下方的轮子。这导致组件容易倾倒。如果该组件被释放并撞到不正确的边缘(12),它将可能翻过护栏(9)倾倒并朝向大海(13)下落。
47.为了将摆动机构和移动平台的组件(22)从甲板投放(lauch)到平台的侧部,必须使用长颈鹿型手动起重机(14),因为组件具有180kg的质量,由涂漆平台释放线缆(15)提升。
48.由于在护栏附近在这种类型的力的情况下工作的风险,并且由于侧部的整个长度未被平台上的起重机覆盖的事实,尤其是在选择用于测试的区域中,在那里起重机不能到达,投放程序必须使用机器人自己的卷绕机来完成。为了有能力提升用于投放的卷绕机,投放必须在起重机(20)之一附近(通常5.5m且彼此远离)进行。图5示出了在起重机之一附加的距离。
49.图6示出了在操作中在左和右两侧上的起重机
‑
卷绕机组件(17)。还示出了竖直涂漆范围和最终水平范围(18)的阈值。作为示例,示出了有效涂漆面积,在这种情况下为17
×
51m2。
50.请注意,线缆系统、起重机和卷绕机的使用不限于此处所示的实施例,因为它们可在任何应用中使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。