技术特征:
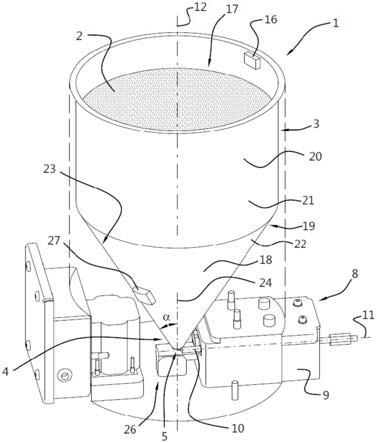
1.一种基于视觉定位的喷涂检测机器人,其特征在于,包括:检测组件,相互以预定角度固定在机架上的第一传输链和第二传输链,以预定距离活动设置在传输链上的检测装置;所述第二传输链固定设置在所述机架的一侧;检测辅助组件,包括对称活动设置在所述传输链两侧并位于所述检测装置的一侧的至少一个夹持组件。2.根据权利要求1所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述夹持组件,通过过渡板与所述第一传输链垂直固定连接,包括沿所述过渡板纵向延伸且固定连接的连接座,以及与所述连接座转动连接并对称设置的夹持臂,所述夹持臂绕第一转动轴相对运动。3.根据权利要求2所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述连接座沿水平方向截面呈“冂”字状,通过转动轴与所述夹持臂转动连接形成可夹持区间。4.根据权利要求3所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述夹持臂设置有沿第一转动轴周向延伸贯穿形成的夹持空间,所述夹持空间与所述夹持臂之间固定连接有锁紧组件。5.根据权利要求4所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述锁紧组件,包括沿所述夹持臂上部横向开设的多个卡槽,与所述卡槽间歇触碰的锁紧轮,以及沿所述夹持臂竖向延伸预定距离后水平接通的空气管,所述空气管的两端活动连接的第一推杆与第二推杆,形成空气流。6.根据权利要求5所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述锁紧轮截面尺寸为倒逗号形状,所述锁紧轮的一侧沿转动轴左方预定角度固定设置有转动块,所述夹持臂通过第二转动轴固定连接并与所述转动块同步绕转动轴预定范围内转动。7.根据权利要求5所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述第二推杆顶部沿径向贯穿形成与所述转动块同等规格的贴合面,所述第二推杆沿周向预定距离延伸与所述夹持臂形成伸缩孔,沿所述第二推杆同轴方向预定距离设置有推块,所述推块与所述伸缩孔内壁间隙配合并固定连接有伸缩件。8.根据权利要求2所述的一种基于视觉定位的喷涂检测机器人,其特征在于:所述连接座中部眼横向延伸固定设置有转动轴,并沿所述过渡板直线运动;所述夹持组件为至少3个,沿待检测法兰运动的方向间隔布设。9.根据权利要求1至8中任一项所述的一种基于视觉定位的喷涂检测机器人的检测方法,其特征在于包括如下步骤:s1、将待检测法兰工件放置在第一传输链的上,并传送至检测装置下方;s2、检测装置对法兰相关数据进行扫描并发送至控制系统,并通过图像系统判定;s3、同时连接座根据系统给出数据进行移动;s4、系统判定法兰表面是否符合检测标准,若判定为否,第三推杆推动法兰移动至第二传输链,若判定为是,法兰继续通过第一传输链实行传送。10.根据权利要求9中所述的一种基于视觉定位的喷涂检测机器人的检测方法,其特征在于,所述图像系统判定包括如下步骤:s1、检测装置对法兰表面进行扫描拍摄;s2、系统根据图像灰度成影判定,深色部位表示已喷涂面,浅色部位表示未喷涂面;
s3、系统根据图像扫描边缘曲线判定,圆弧高度为涂料超出预定值区域,水平直线为涂料正常区域;s4、系统根据数据判定对法兰实施分类。
技术总结
本发明提供一种基于视觉定位的喷涂检测机器人及其检测方法,通过检测装置对法兰表面喷涂情况进行区别判定,并通过传输链进行分类,便于工人随时检测喷涂质量情况,从而有效提高工作效率。检测装置同时对法兰表面尺寸进行扫描发送相关数据至控制系统,从而有效调节夹紧组件沿过渡板的移动距离,有效防止后续翻转过程中,法兰边缘触碰到传输链,影响法兰表面质量。通过对称设置的夹持臂实现对法兰底座的夹持,可相对转动的夹持臂有效扩大了可夹持范围,并根据法兰自身重力实现锁紧轮工作,从而进一步提高夹持臂的有效夹持力。通过空气压缩实现对锁紧轮转动从而保证锁紧状态,充分利用法兰自身重量以及空气实现锁紧状态,有效利用资源,节约能源。节约能源。节约能源。
技术研发人员:王银 叶尧珍 谢宏 鲍怡香
受保护的技术使用者:南京轩世琪源软件科技有限公司
技术研发日:2021.07.29
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。