1.本发明涉及法兰加工技术领域,具体涉及一种基于视觉定位的喷涂检测机器人及其检测方法。
背景技术:
2.法兰连接的完整性对于输送流体管道系统至关重要。无论是输送化学介质的管道系统,还是供水管线,法兰连接泄漏都会造成严重的环境及经济影响, 甚至可能带来巨大的安全隐患。法兰表面常采用喷涂方式进行防腐蚀。
3.现有的法兰喷涂加工,通过喷枪对法兰进行喷涂,由于法兰外形复杂,时常会出现喷涂表面缺陷,涂覆厚度不一,法兰喷涂的均匀性较差,法兰死角漏喷等情况,导致加工工效率降低,油漆浪费严重。由于法兰外形特殊并且多变,分有带颈法兰、整体法兰以及法兰盖等等,传统的检测装置无法实现对法兰多角度平面进行检测。
技术实现要素:
4.发明目的:提供一种基于视觉定位的喷涂检测机器人及其检测方法,通过可伸缩式的上研磨盘实现同时加工不同高度的工件,从而解决了现有技术存在的上述问题。
5.技术方案:一种基于视觉定位的喷涂检测机器人,包括检测组件以及检测辅助组件两部分。
6.其中,检测组件,相互以预定角度固定在机架上的第一传输链和第二传输链,以预定距离活动设置在传输链上的检测装置;所述第二传输链固定设置在所述机架的一侧;第一传输链与第二传输链相互设置有任意角度,通过检测装置有效区分法兰喷涂情况,便于工人随时检测喷涂质量情况,从而有效提高工作效率。
7.检测辅助组件,包括对称活动设置在所述传输链两侧并位于所述检测装置的一侧的至少一个夹持组件。
8.在进一步实施例中,所述夹持组件,通过过渡板与所述第一传输链垂直固定连接,包括沿所述过渡板纵向延伸且固定连接的连接座,以及与所述连接座转动连接并对称设置的夹持臂,所述夹持臂绕第一转动轴相对运动。夹持组件根据检测组件对法兰大小,在保持对法兰充分夹紧力的条件下,沿过渡板自动根据法兰尺寸数据移动至预定距离,夹持臂绕第一转动轴相对或相向运动,实现对法兰的夹持与放松。
9.在进一步实施例中,所述连接座沿水平方向截面呈“冂”字状,通过转动轴与所述夹持臂转动连接形成可夹持区间。夹持臂与连接座通过第一转动轴连接,夹持臂闭合时整体呈圆头普通平键状,夹持臂的末端边缘与连接座内壁设置有预定距离,从而有效扩大夹持臂所伸展的角度,增大夹持范围。
10.在进一步实施例中,所述夹持臂设置有沿第一转动轴周向延伸贯穿形成的夹持空间,所述夹持空间与所述夹持臂之间固定连接有锁紧组件。夹持臂夹持部分相互设置有预定距离,用于放置锁紧组件,锁紧组件有效防止夹持臂松动而导致法兰不稳晃动甚至脱落,
从而影响检测数据的准确性,并且锁紧组件位于夹持臂之前能够有效保证维修方便。
11.在进一步实施例中,所述锁紧组件,包括沿所述夹持臂上部横向开设的多个卡槽,与所述卡槽间歇触碰的锁紧轮,以及沿所述夹持臂竖向延伸预定距离后水平接通的空气管,所述空气管的两端活动连接的第一推杆与第二推杆,形成空气流。第一推杆采用空气推杆,并沿夹持臂内壁延伸预定距离向法兰底面靠拢,从而使法兰接触到空气推杆时,能够推动空气推杆,通过始终压缩空气从而保证锁紧轮始终处于锁紧状态,卡槽沿上半部分夹持臂内侧设置,从而使夹持臂在任意伸展范围内始终能够保证锁紧组件完成锁紧工作,提高夹持臂的夹持效果。
12.在进一步实施例中,所述锁紧轮截面尺寸为倒逗号形状,所述锁紧轮的一侧沿转动轴左方预定角度固定设置有转动块,所述夹持臂通过第二转动轴固定连接并与所述转动块同步绕转动轴预定范围内转动。锁紧轮的通过第二转动轴卡扣在夹持臂内部,沿第二转动轴周向转动预定角度形成转动圆弧并与夹持臂内侧相切,沿圆弧径向顺时针旋转并逐渐增宽延伸90度形成锁紧轮,锁紧轮的圆弧接触面与卡槽形成线接触,平面与卡槽形成面接触,从而保证锁紧轮沿顺时针方向旋转实现锁紧,反向旋转实现放松状态。
13.在进一步实施例中,所述第二推杆顶部沿径向贯穿形成与所述转动块同等规格的贴合面,所述第二推杆沿周向预定距离延伸与所述夹持臂形成伸缩孔,沿所述第二推杆同轴方向预定距离设置有推块,所述推块与所述伸缩孔内壁间隙配合并固定连接有伸缩件。第二推杆与转动块紧密贴合,从而实现高效推送,第一推杆压缩空气推动第二推杆实现推送,充分利用法兰自身重量以及空气实现锁紧轮处于锁紧状态,有效利用资源,节约能源。伸缩孔用于放置零部件,避免零部件沿夹持臂内部移动增大摩擦阻力,从而使传送效率大大降低。伸缩件采用弹簧套接第二推杆,空气压缩推动推块后,推块压缩弹簧并推动第二推杆贴合转动块,从而实现推送,伸缩件有效限制推块的移动方向并在推块贴紧第二推杆时,实现缓冲效果。
14.在进一步实施例中,所述连接座中部眼横向延伸固定设置有转动轴,并沿所述过渡板直线运动。连接座根据系统对法兰外形尺寸的数据进行移动,并在进行二次平面检测时有效防止法兰翻转过程中撞击第一传输链。
15.此外,本发明提供了一种基于视觉定位的喷涂检测机器人的检测方法,包括如下步骤:s1、将待检测法兰工件放置在第一传输链的上,并传送至检测装置下方;s2、检测装置对法兰相关数据进行扫描并发送至控制系统,并通过图像系统判定并进行标记;s3、同时连接座根据系统给出数据进行移动;s4、系统判定法兰表面是否符合检测标准,若判定为否,第三推杆推动法兰移动至第二传输链,若判定为是,法兰继续通过第一传输链实行传送。
16.在进一步实施例中,所述图像系统判定包括如下步骤:s1、检测装置对法兰表面进行扫描拍摄;s2、系统根据图像灰度成影判定,深色部位表示已喷涂面,浅色部位表示未喷涂面;s3、系统根据图像扫描边缘曲线判定,圆弧高度为涂料过厚区域,水平直线为涂料
正常区域;s4、系统根据数据判定对法兰实施分类。
17.有益效果:本发明提供一种基于视觉定位的喷涂检测机器人的检测方法,通过检测装置对法兰表面喷涂情况进行区别判定,并通过传输链进行分类,便于工人随时检测喷涂质量情况,从而有效提高工作效率。检测装置同时对法兰表面尺寸进行扫描发送相关数据至控制系统,从而有效调节夹紧组件沿过渡板的移动距离,有效防止后续翻转过程中,法兰边缘触碰到传输链,影响法兰表面质量。通过对称设置的夹持臂实现对法兰底座的夹持,可相对转动的夹持臂有效扩大了可夹持范围,并根据法兰自身重力实现锁紧轮工作,从而进一步提高夹持臂的有效夹持力。通过空气压缩实现对锁紧轮的转动从而保证锁紧状态,充分利用法兰自身重量以及空气实现锁紧轮处于锁紧状态,有效利用资源,节约能源。
附图说明
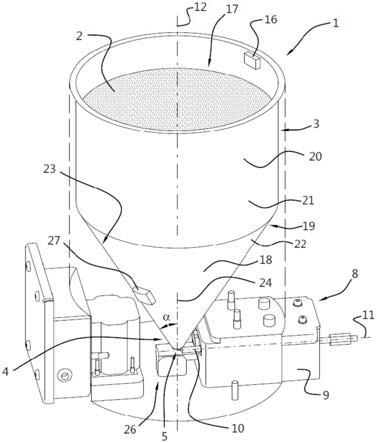
18.图1为本发明的整体结构示意图。
19.图2为本发明中夹紧组件的整体结构图。
20.图3为本发明中夹紧组件的工作状态示意图。
21.图4为本发明中锁紧组件的工作状态示意图。
22.图5为本发明中第二推杆的状态位置图。
23.图中各附图标记为:检测装置1、夹紧组件2、连接座201、第一转动轴202、夹持臂203、过渡板3、第一传输链4、第二传输链5、第三转动轴6、法兰7、锁紧组件8、卡槽801、锁紧轮802、第一推杆803、第二推杆804、伸缩件8041、空气管805、推块8042、转动块9。
具体实施方式
24.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
25.申请人认为,传统喷涂法兰7过程中,采用直线移动式的喷涂方式进行,由于法兰7外形不一,并且种类多样,喷涂完毕后的法兰7表面存在有漏喷的情况,喷头的稳定性是目前喷涂技术中最难掌控的一项,所以喷涂表面会出现涂料厚度不一的缺陷,而传统的检测装置1无法适应于法兰7,针对上述缺陷,本发明提供了一种基于视觉定位的喷涂检测机器人及其检测方法,通过可伸缩式的上研磨盘实现同时加工不同高度的工件,从而解决了现有技术存在的上述问题。
26.如图1至图5所示,本发明公开了本发明提供一种基于视觉定位的喷涂检测机器人及其检测方法,通过检测装置1对法兰7表面喷涂情况进行区别判定,并通过传输链进行分类,便于工人随时检测喷涂质量情况,从而有效提高工作效率。检测装置1同时对法兰7表面尺寸进行扫描发送相关数据至控制系统,从而有效调节夹紧组件2沿过渡板3的移动距离,有效防止后续翻转过程中,法兰7边缘触碰到传输链,影响法兰7表面质量。通过对称设置的夹持臂203实现对法兰7底座的夹持,可相对转动的夹持臂203有效扩大了可夹持范围,并根据法兰7自身重力实现锁紧轮802工作,从而进一步提高夹持臂203的有效夹持力。通过空气
压缩实现对锁紧轮802的转动从而保证锁紧状态,充分利用法兰7自身重量以及空气实现锁紧轮802处于锁紧状态,有效利用资源,节约能源。
27.具体方案如下:一种基于视觉定位的喷涂检测机器人,包括检测组件以及检测辅助组件两部分。
28.其中,检测组件,相互以预定角度固定在机架上的第一传输链4和第二传输链5,以预定距离活动设置在传输链上的检测装置1;所述第二传输链5固定设置在所述机架的一侧;第一传输链4与第二传输链5相互设置有任意角度,用于检测装置1进行检测完毕后,区分法兰7喷涂情况,将有无喷涂缺陷的法兰7进行分类,并且检测装置1对缺陷部位进行定位标记,便于工人随时检测喷涂质量情况,从而有效提高工作效率。检测过程中,法兰7工件稳定保持在检测装置1下方,并在实现稳定转动,对检测结果数据有着重要影响。
29.检测辅助组件,包括对称活动设置在所述传输链两侧并位于所述检测装置1的一侧的夹持组件。法兰7形状均以圆盘为基础进行形状改变,从而形成各种规格的法兰7,由于法兰7表面形状固定有圆盘,通过夹紧圆盘便可实现法兰7稳定夹持。
30.所述夹持组件,通过过渡板3与所述第一传输链4垂直固定连接,包括沿所述过渡板3纵向延伸且固定连接的连接座201,以及与所述连接座201转动连接并对称设置的夹持臂203,所述夹持臂203绕第一转动轴202相对运动。所述连接座201沿水平方向截面呈“冂”字状,通过转动轴与所述夹持臂203转动连接形成可夹持区间。
31.夹持组件根据检测组件提供的法兰7尺寸,在保持对法兰7充分夹紧力的条件下,沿过渡板3自动根据法兰7尺寸数据移动至预定距离,连接座201沿过渡板3移动时带动夹持臂203实现同步运动,夹持臂203绕第一转动轴202相对或相向运动,实现对法兰7的夹持与放松。
32.由于法兰7通过传输链传送至检测装置1下方,法兰7底面与传输链上表面密切接触,夹持臂203的边缘对法兰7夹持面不能很好的直接接触,导致夹持困难,夹持臂203与连接座201通过第一转动轴202连接,夹持臂203闭合时整体呈圆头普通平键状,夹持臂203的末端边缘与连接座201内壁设置有预定距离,从而有效扩大夹持臂203所伸展的角度,增大夹持范围。
33.夹持臂203通过转动后,内表面与法兰7工件表面贴合实现夹持,但是仅仅依靠夹持臂203转动对法兰7表面并没有相互作用力,从而导致无法实现夹紧效果,所述夹持臂203设置有沿第一转动轴202周向延伸贯穿形成的夹持空间,所述夹持空间与所述夹持臂203之间固定连接有锁紧组件8。夹持空间同时保证夹持臂203边缘呈线性,对于传输链密切贴合的法兰7有效实现夹持,夹持臂203夹持部分相互设置有预定距离,用于放置锁紧组件8,锁紧组件8有效防止夹持臂203松动而导致法兰7不稳晃动甚至脱落,从而影响检测数据的准确性,并且由于锁紧轮802转动频繁,从而在锁紧过程中对卡槽801内壁撞击频繁,长期使用容易损坏锁紧轮802,锁紧组件8位于夹持臂203之前能够有效保证维修方便。
34.锁紧轮802根据法兰7尺寸以及夹持臂203之间的角度,需要实现不同卡位的锁紧,从而提高锁紧范围,所述锁紧组件8,包括沿所述夹持臂203上部横向开设的多个卡槽801,与所述卡槽801间歇触碰的锁紧轮802,以及沿所述夹持臂203竖向延伸预定距离后水平接通的空气管805,所述空气管805的两端活动连接的第一推杆803与第二推杆804,形成空气流。卡槽801根据支撑臂转动范围进行设置,当支撑臂之间夹角处于最小限位值时,锁紧轮
802位于卡槽801首位靠近法兰7工件,反之则位于卡槽801末端,远离法兰7工件,如此在不用更换锁紧轮802大小的同时实现不同角度的夹持,提高锁紧轮802的适应性。第一推杆803采用空气推杆,并沿夹持臂203内壁延伸预定距离向法兰7底面靠拢,从而使法兰7接触到空气推杆时,能够推动空气推杆,通过始终压缩空气从而保证锁紧轮802始终处于锁紧状态,卡槽801沿上半部分夹持臂203内侧设置,从而使夹持臂203在任意伸展范围内始终能够保证锁紧组件8完成锁紧工作,提高夹持臂203的夹持效果。
35.传统普通凸轮圆弧滑动接触无法实现卡扣效果,为保证锁紧轮802转动实现锁紧,所述锁紧轮802截面尺寸为倒逗号形状,所述锁紧轮802的一侧沿转动轴左方预定角度固定设置有转动块9,所述夹持臂203通过第二转动轴固定连接并与所述转动块9同步绕转动轴预定范围内转动。锁紧轮802的通过第二转动轴卡扣在夹持臂203内部,沿第二转动轴周向转动预定角度形成转动圆弧并与夹持臂203内侧相切,沿圆弧径向顺时针旋转并逐渐增宽延伸90度形成锁紧轮802,锁紧轮802的圆弧接触面与卡槽801形成线接触,平面与卡槽801形成面接触,从而保证锁紧轮802沿顺时针方向旋转实现锁紧,反向旋转实现放松状态。
36.第二推杆804推动转动块9移动,所接触的有效面积有效反应了移动的平稳性以及移动效率。所述第二推杆804顶部沿径向贯穿形成与所述转动块9同等规格的贴合面,所述第二推杆804沿周向预定距离延伸与所述夹持臂203形成伸缩孔,沿所述第二推杆804同轴方向预定距离设置有推块8042,所述推块8042与所述伸缩孔内壁间隙配合并固定连接有伸缩件8041。第二推杆804与转动块9紧密贴合,从而实现高效推送,第一推杆803压缩空气推动第二推杆804实现推送,充分利用法兰7自身重量以及空气实现锁紧轮802处于锁紧状态,有效利用资源,节约能源。伸缩孔用于放置零部件,避免零部件沿夹持臂203内部移动增大摩擦阻力,从而使传送效率大大降低。伸缩件8041采用弹簧套接第二推杆804,空气压缩推动推块8042后,推块8042压缩弹簧直至推块8042触碰到第二推杆804,并推动第二推杆804贴合转动块9,第二推杆804推动转动块9移动同时带动锁紧轮802转动,从而实现推送,伸缩件8041有效限制推块8042的移动方向并在推块8042贴紧第二推杆804时,实现缓冲效果。法兰7始终压紧第一推杆803,保持气体压缩状态,从而当第二推杆804推动锁紧轮802至预定位置后,只要第二推杆804不复位,锁紧轮802始终处于锁紧状态。
37.由于法兰7表面朝向不同方向,水平设置容易检测遗漏,从而无法保证检测数据的准确性,所述连接座201中部眼横向延伸固定设置有第三转动轴6,并沿所述过渡板3直线运动。连接座201根据系统对法兰7外形尺寸的数据进行移动,第三转动轴6带动夹紧组件2转动,实现不同方向的检测,并在进行二次平面检测时有效防止法兰7翻转过程中撞击第一传输链4。
38.第三转动轴6同时带动夹紧组件2的移动以及旋转,夹紧组件2承受法兰7自身重量,在移动至预定位置时,无法保证整体夹紧组件2受重力影响自动下移,过渡板3内部预定距离均匀设置有多个卡位,卡位伸缩设置,在转动轴带动夹紧组件2移动至卡位上方,卡位自动伸出,对夹紧组件2进行限位,防止下滑。
39.此外,本发明提供了一种基于视觉定位的喷涂检测机器人的检测方法,包括如下步骤:将待检测法兰7工件放置在第一传输链4的上,并传送至检测装置1下方;检测装置1对法兰7相关数据进行扫描并发送至控制系统,并通过图像系统判定并进行标记;夹持臂203伸展至预定角度将位于传输链上的法兰7实施夹持,两侧夹持臂203同时承受法兰7自身重
量,在法兰7的压动下第一推杆803,从而实现空气压缩至第二推杆804,带动锁紧轮802转动至卡槽801内实现锁紧,夹紧组件2根据系统给出的法兰7尺寸,移动至预定位置,第三转动轴6带动连接座201翻转,从而实现法兰7不同方向面的检测,检测装置1对法兰7表面再次进行图像系统判定并标记,具体步骤为:检测装置1对表面进型扫描拍摄,系统根据图像灰度成影判定,深色部位表示已喷涂面,浅色部位表示未喷涂面;系统根据图像扫描边缘曲线判定,圆弧高度为涂料过厚区域,水平直线为涂料正常区域;通过系统判断法兰7表面是否符合检测标准,若判定为否,第三推杆推动法兰7移动至第二传输链5,若判定为是,法兰7继续通过第一传输链4实行传送。
40.在进一步的实施例中,夹持组件为至少两组,在优选的实施例中,为三组,每组各自具有轴向运动自由度;或者夹持组件具有沿平行于法兰运动平面的转动自由度。由于部分法兰的凸缘为两个,分布于两端,也有部分法兰的凸缘的侧面垂直于法兰本体表面,因此,如果正对法兰拍照,则会存在无法拍摄另一侧的法兰侧面,或者由于正对法兰的凸缘,无法拍摄法兰的侧面的情况。
41.在进一步的实施例中,夹持组件为至少两组,在优选的实施例中,为三组,每组各自具有轴向运动自由度;或者夹持组件具有沿平行于法兰7运动平面的转动自由度。由于部分法兰7的凸缘为两个,分布于两端,也有部分法兰7的凸缘的侧面垂直于法兰7本体表面,因此,如果正对法兰7拍照,则会存在无法拍摄另一侧的法兰7侧面,或者由于正对法兰7的凸缘,无法拍摄法兰7的侧面的情况。
42.因此,通过沿法兰7运动方向上设置多组夹持组件,或者设置可以沿运动平面转动的夹持组件,在法兰7水平运动(法兰7的轴线平行于运动平面),沿运动的方向,在不同位置拍摄时,能够形成至少两个可以拍摄到凸缘侧面与本体连接处的图像,从而能够更加准确的判断是否存在缺陷。在不同的夹持组件的夹持下,随着运动的方向,对法兰7进行沿轴向的翻转预定角度,从而实现对法兰7倾斜拍照和不同侧面的拍照,实现对法兰7的立体拍照。实现在周向上的拍照和轴向上的倾斜拍照。
43.在进一步的实施例中,如果法兰7是竖直运输的,即轴线方向垂直于运动平面,则通过在运动过程中的转动,也可形成倾斜拍照和沿轴向拍照,从而获得更多的检测区域。
44.在进一步的实施例中,通过坚持组件上设置有定位区域,形成更大的色差,提高待检测区域的识别度。通过对夹持组件的快速定位,形成对法兰7的高效检测。
45.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。