1.本发明涉及医疗器械技术领域,特别涉及一种六杆自动定心夹持机械手。
背景技术:
2.超声诊断是将超声检测技术应用于人体,通过超声测量器官组织结构数据,发现疾病;超声检查技术以其无损性、灵敏度高等特点,被广泛应用在临床中;超声影像仪器经过六十多年的发展,超声诊断仪器的功能日益提高,人机交互能力逐渐完善,各种超声检查仪器应用在各级医疗机构中。
3.在超声检查时,为预防交叉感染,医务人员使用隔离套对超声探头与皮肤等检查位置进行隔离;在包覆隔离套的过程中,需要医务人员手持超声探头;但是,医院超声检查室中有很多等待超声检查的患者,每次由医务人员手持超声探头进行包覆隔离套,大大增加了劳动量,造成医疗资源的浪费,因此设计一种六杆自动定心夹持机械手代替或者辅助医务人员进行手持超声探头进行包覆隔离套显得十分重要。
技术实现要素:
4.本发明的目的是解决背景技术中存在的不足:提供一种六杆自动定心夹持机械手代替医务人员手持超声探头,将隔离套包覆在超声探头检查表面,避免医疗资源浪费。
5.实现上述的目的,本发明提供如下的技术方案:一种六杆自动定心夹持机械手,包括:动力输入部分(1)、六杆夹持机械手(2)、柔性矩阵夹具(3)、预运动探头保持架(4);其中:进一步的,所述的动力输入部分(1)包括:步进电机(101)、步进电机安装机座(102)、安装支撑板(103)、支撑座(104)、内支撑安装座(105)、传动丝杠(106)、联轴器(107)、直线光轴导轨(108)、轴承(109)、超声探头(5);所述的步进电机(101)与传动丝杠(106)通过联轴器(107)进行连接;所述的步进电机(101)安装在步进电机安装机座(102)上,实现对步进电机(101)的固定安装;所述的步进电机安装机座(102)、轴承支撑座(109)和内支撑安装座(105)分别安装在所述的安装支撑板(103)的相同表面;所述的两根直线光轴导轨(108)分别安装在轴承支撑座(104)的两侧,成对称设分布;所述的直线光轴导轨(108)与轴承支撑座(104)连接处位置安装有铜套,起支撑固定的作用;所述的丝杠中心线与两根直线轴承(109)中心线位于同一平面,且关于所述的丝杠中心线对称,在丝杠做往复运动中,使其运动部件受力均匀。
6.进一步的,所述的六杆夹持机械手(2)由大v形运动连杆(201)、机械手自适应指尖(202)、软钢片(203)、机械手手指(204)、机械手连杆(205)、u形安装支座(206)等部分组成;所述的大v形运动连杆(201)与所述的动力输入部分(1)的丝杠通过丝杠螺母进行连接,将所述的动力输入部分(1)丝杠的旋转运动转化为直线运动,从而驱动所述的大v形运动连杆(201)进行往复运动;所述的大v形运动连杆(201)的两侧安装在所述的动力输入部分(1)的两根直线光轴导轨(108)上,实现所述的大v形运动连杆(201)在两根所述的直线光轴导轨
(108)上做稳定的往复运动,且提高机构的承载能力;所述的u形安装支座(206)与所述的动力输入部分(1)的安装支撑板(103)通过内支撑安装座(105)进行连接,使所述的u形安装支座(206)固定连接在安装支撑板(103)上;所述的u形安装支座(206)与所述的机械手连杆(205)的一端相连接,所述的机械手手指(204)中间位置与机械手连杆(205)的另一端连接,所述的机械手下部连接位置与大v形运动连杆(201)一侧进行连接,继而形成所述的六杆自动定心夹持机械手(2)的机械结构;所述的机械手手指(204)上安装有所述的机械手指尖,所述的软钢片(203)安装在所述的自适应指尖上,所述的机械手自适应指尖(202)在夹持过程中能够自适应超声探头(5)手柄的形状,从而所述的软钢片(203)与超声探头(5)手柄吻合夹持,最终实现夹持超声探头(5)的目的。
7.进一步的,所述的柔性矩阵夹具(3)包括:夹持探针(301)、上壳体(302)、锁紧偏心轴(303)、下壳体(304)、第一支撑板(305)、第二支撑板(306)、锁紧夹板 (307)、内六角圆柱头螺栓 (308)、导向柱(309)、弹簧(310);其特征在于:所述的第一支撑板(305)与所述的第二支撑板(306)中间位置设置间隔,间隔的空间设计为柔性矩阵夹具的自锁结构,自锁结构包括锁紧夹板(307)、锁紧偏心轴(303);所述的自锁结构安装在上壳体(302)设置的圆形卡槽位置;所述的锁紧夹板(307)结构由若干个锁紧夹板(307)组成,并安装在所述的锁紧偏心轴(303)上,在转动锁紧偏心轴(303)的作用下,锁紧夹板(307)随锁紧偏心轴(303)运动,使其柔性矩阵夹具(3)具有良好的自锁功能。
8.进一步的,所述的预运动探头保持架(4)包括:弧面支撑架(207)、s形连杆(208)等;其特征在于:所述的s形连杆(208)用螺栓安装在所述动力输入部分(1)轴承支撑座(104)上,所述的两根s形连杆(208)交叉安装,交叉点位置由螺栓安装在所述的六杆自动定心夹持机械手(2)大v形运动连杆(201)上,并且随所述的大v形运动连杆(201)的运动,实现保持探头的功能。
9.进一步的,所述的步进电机(101)提供夹持机械手实现夹持功能所需的驱动力矩,驱动力矩通过联轴器(107)传递到安装在所述轴承支撑座(104)和所述u形安装支座(206)上的所述丝杆上,所述的丝杠将所述的步进电机(101)的旋转运动转化为大v形运动连杆(201)的直线运动,所述的大v形运动连杆(201)带动机械手进行运动,所述的u形安装支座(206)与所述的机械手连杆(205)通过螺栓进行连接;在所述机械手手指(204)与所述机械手连杆(205)的共同运动下,实现六杆自动定心夹持机械手自适应夹持超声探头(5)的功能。
10.进一步的,在所述的夹持探针(301)受到上端面的压力作用时,弹簧(310)会在压力的作用下进行压缩,压缩一定程度后,转动所述的锁紧偏心轴(303),使所述的锁紧压板进行联动,所述的锁紧夹板(307)与所述的第一支撑板(305)、第二支撑板(306)产生偏心距离,从而使弹簧(310)探针保持压缩的距离不变;在恢复压缩的形状时,反向转动锁紧偏心轴(303),使所述的锁紧夹板(307)与所述的第一支撑板(305)、第二支撑板(306)产生的偏心距离恢复到原始状态;由单个探针组合扩大到一定面积范围内的探针组合,可实现自适应作用物体外部形状的功能;在锁紧情况下,亦可保持与夹持物体的外部形状相适应的形态。
11.进一步的,所述的柔性矩阵夹具(3)安装在所述的六杆夹持机械手(2)u形安装支座(206)上。
12.进一步的,所述的弧面保持架支撑未夹紧的夹持物体,保持夹紧前的形态。
13.与现有技术相比,本发明的有益效果是:通过一种六杆自动定心夹持机械手能够代替医务人员手持超声探头,使夹持机械手自适应超声探头手柄形状,节省医务人员的劳动力,提高工作效率。
附图说明
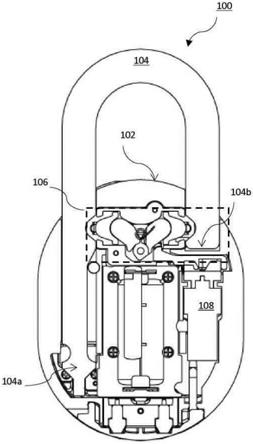
14.图1 一种六杆自动定心夹持机械手夹持状态结构示意图。
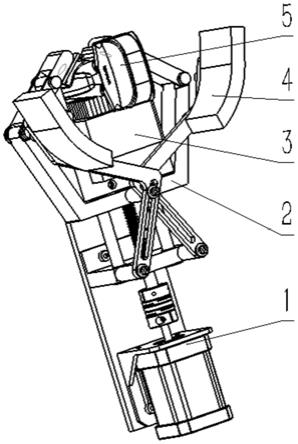
15.图2 一种六杆自动定心夹持机械手张开状态结构示意图。
16.图3 一种六杆自动定心夹持机械手爆炸结构示意图。
17.图4 一种六杆自动定心夹持机械手柔性矩阵夹具整体结构示意图。
18.图5 一种六杆自动定心夹持机械手柔性矩阵夹具整体结构爆炸示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
20.结合图1、图2、图3所示,一种六杆自动定心夹持机械手,包括:动力输入部分1、六杆夹持机械手2、柔性矩阵夹具3、预运动探头保持架4;其中:上述的动力输入部分1包括:步进电机101、步进电机安装机座102、安装支撑板103、支撑座104、内支撑安装座105、传动丝杠106、联轴器107、直线光轴导轨108、轴承109、超声探头5;所述的步进电机101与传动丝杠106通过联轴器107进行连接;所述的步进电机101安装在步进电机安装机座102上,实现对步进电机101的固定安装;所述的步进电机安装机座102、轴承支撑座109和内支撑安装座105分别安装在所述的安装支撑板103的相同表面;所述的两根直线光轴导轨108分别安装在轴承支撑座104的两侧,成对称设分布;所述的直线光轴导轨108与轴承支撑座104连接处位置安装有铜套,起支撑固定的作用;所述的丝杠中心线与两根直线轴承109中心线位于同一平面,且关于所述的丝杠中心线对称,在丝杠做往复运动中,使其运动部件受力均匀。
21.上述的六杆夹持机械手2由大v形运动连杆201、机械手自适应指尖202、软钢片203、机械手手指204、机械手连杆205、u形安装支座206等部分组成;所述的大v形运动连杆201与所述的动力输入部分1的丝杠通过丝杠螺母进行连接,将所述的动力输入部分1丝杠的旋转运动转化为直线运动,从而驱动所述的大v形运动连杆201进行往复运动;所述的大v形运动连杆201的两侧安装在所述的动力输入部分1的两根直线光轴导轨108上,实现所述的大v形运动连杆201在两根所述的直线光轴导轨108上做稳定的往复运动,且提高机构的承载能力;所述的u形安装支座206与所述的动力输入部分1的安装支撑板103通过内支撑安装座105进行连接,使所述的u形安装支座206固定连接在安装支撑板103上;所述的u形安装支座206与所述的机械手连杆205的一端相连接,所述的机械手手指204中间位置与机械手连杆205的另一端连接,所述的机械手下部连接位置与大v形运动连杆201一侧进行连接,继而形成所述的六杆自动定心夹持机械手2的机械结构;所述的机械手手指204上安装有所述的机械手指尖,所述的软钢片203安装在所述的自适应指尖上,所述的机械手自适应指尖
202在夹持过程中能够自适应超声探头5手柄的形状,从而所述的软钢片203与超声探头5手柄吻合夹持,最终实现夹持超声探头5的目的。
22.上述的柔性矩阵夹具3包括:夹持探针301、上壳体302、锁紧偏心轴303、下壳体304、第一支撑板305、第二支撑板306、锁紧夹板 307、内六角圆柱头螺栓 308、导向柱309、弹簧310;其特征在于:所述的上壳体302通过四个内六角圆柱头螺栓308连接在下壳体304的上表面,使所述的上壳体302和所述的下壳体304成为固定的整体;将所述的弹簧310套在弹簧310导向柱309上,再将所述的夹持探针301与所述的弹簧310导向柱309连接在一起,使之成为可压缩复原的柔性个体;所述的第一支撑板305与所述的第二支撑板306中间位置设置间隔,间隔的空间设计为柔性矩阵夹具的自锁结构,自锁结构包括锁紧夹板307、锁紧偏心轴303;所述的自锁结构安装在上壳体302设置的圆形卡槽位置;所述的锁紧夹板307结构由若干个锁紧夹板307组成,并安装在所述的锁紧偏心轴303上,在转动锁紧偏心轴303的作用下,锁紧夹板307随锁紧偏心轴303运动,使其柔性矩阵夹具3具有良好的自锁功能;所述的第一支撑板305、第二支撑板306、锁紧夹板307分别设计有若干弹簧310导向柱309安装孔,且三者相对的弹簧310导向柱309同轴安装。
23.上述的预运动探头保持架4包括:弧面支撑架207、s形连杆208等;其特征在于:所述的s形连杆208用螺栓安装在所述动力输入部分1轴承支撑座104上,所述的两根s形连杆208交叉安装,交叉点位置由螺栓安装在所述的六杆自动定心夹持机械手2大v形运动连杆201上,并且随所述的大v形运动连杆201的运动,实现保持探头的功能。
24.上述的步进电机101提供夹持机械手实现夹持功能所需的驱动力矩,驱动力矩通过联轴器107传递到安装在所述轴承支撑座104和所述u形安装支座206上的所述丝杆上,所述的丝杠将所述的步进电机101的旋转运动转化为大v形运动连杆201的直线运动,所述的大v形运动连杆201带动机械手进行运动,所述的u形安装支座206与所述的机械手连杆205通过螺栓进行连接;在所述机械手手指204与所述机械手连杆205的共同运动下,实现六杆自动定心夹持机械手自适应夹持超声探头5的功能。
25.上述的夹持探针301受到上端面的压力作用时,弹簧310会在压力的作用下进行压缩,压缩一定程度后,转动所述的锁紧偏心轴303,使所述的锁紧压板进行联动,所述的锁紧夹板307与所述的第一支撑板305、第二支撑板306产生偏心距离,从而使弹簧310探针保持压缩的距离不变;在恢复压缩的形状时,反向转动锁紧偏心轴303,使所述的锁紧夹板307与所述的第一支撑板305、第二支撑板306产生的偏心距离恢复到原始状态;由单个探针组合扩大到一定面积范围内的探针组合,可实现自适应作用物体外部形状的功能;在锁紧情况下,亦可保持与夹持物体的外部形状相适应的形态。
26.上述的柔性矩阵夹具3安装在所述的六杆夹持机械手2u形安装支座206上。
27.上述的弧面保持架支撑未夹紧的超声探头5,保持夹紧前的形态。
28.与现有技术相比,本发明的有益效果是:通过一种六杆自动定心夹持机械手能够代替医务人员手持超声探头,使夹持机械手自适应超声探头手柄形状,节省医务人员的劳动力,提高工作效率。
29.对所公开实施例的上述说明,使本领域专业技术人员能够实现或使用本发明,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现;因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理
和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。