1.本发明涉及一种抛光装置,具体涉及适用于保持恒定压力更加稳定的一种机器人恒压小工具抛光装置。
背景技术:
2.普通行星运动磨头和平转动磨头只能对光学玻璃表面进行抛光,不能保持的恒定压力更加稳定,转速不高,线速度不块,加工效率不够,抛光效果达不到抛光精度的要求。
技术实现要素:
3.本发明的目的是提供一种机器人恒压小工具抛光装置,相对于传统小工具抛光,摒弃了自转保留公转运动,转速更高,线速度更块,拥有更高的加工效率,抛光装置更加简洁使去除函数更稳定,能解决小工具磨头贴合工件曲面运作的问题;采用动态力位执行器比气缸保持的恒定压力更加稳定,并能实时反馈压力数据。
4.为了达到上述目的,本发明有如下技术方案:
5.本发明的一种机器人恒压小工具抛光装置,包括六轴机器人,机器人安装板,动态力位执行器安装板,动态力位执行器,夹具安装板,伺服电机,减速机,连接轴,调节块,小工具安装座,旋转轴,小工具磨头,销接机构,所述六轴机器人端部与机器人安装板连接,机器人安装板与动态力位执行器安装板连接,动态力位执行器安装板与动态力位执行器顶部连接,动态力位执行器底部与夹具安装板连接,伺服电机与减速机连接,减速机通过夹具安装板与连接轴连接,连接轴通过安装盘与调节块顶部连接,调节块底部与小工具安装座连接,小工具安装座与旋转轴连接,旋转轴通过销接机构与小工具磨头连接,小工具磨头用于对工件抛光。
6.其中,所述调节块包括上滑块、下滑块、固定块1、固定块2、调节螺栓、侧边螺钉,下滑块顶部与上滑块接触,调节螺栓位于上滑块与下滑块之间,所述调节螺栓尾部插在固定块1内,固定块1固定在上滑块内,固定块2将固定块1固定定位,调节螺栓端部为螺纹杆,该螺纹杆插入下滑块的螺纹孔内;拧动调节螺栓,通过调节螺栓的螺纹杆与下滑块螺纹孔配合,使下滑块移动,形成上滑块与下滑块之间的相对运动,即能调节上滑块与下滑块的相对位置,调节完后用侧边螺钉定位,从而满足抛光时所需要的偏移量,从而保证小工具磨头能接触工件,实施抛光运作。
7.其中,所述销接机构包括销轴、连接球、销座、嵌槽,连接球与旋转轴底部连接,销轴固定在连接球两侧,且销轴垂直于旋转轴,所述销座与小工具磨头连接,嵌槽位于销座顶部;连接球与销轴嵌在销座顶部的嵌槽内,能保证旋转轴能定位在小工具磨头的中心点位;通过连接球嵌入嵌槽,旋转轴与小工具磨头没有沿销轴的轴向方向的相对移动,但能使销座绕销轴偏转,带动小工具磨头略微偏转,使得小工具磨头能更贴合工件曲率。
8.由于采取了以上技术方案,本发明的的优点在于:
9.1、相对于传统小工具抛光,摒弃了自转保留公转运动,转速更高,线速度更块,拥
有更高的加工效率。
10.2、机构更加简洁使去除函数更稳定。
11.3、采用动态力位执行器比气缸保持的恒定压力更加稳定,并能实时反馈压力数据。
附图说明
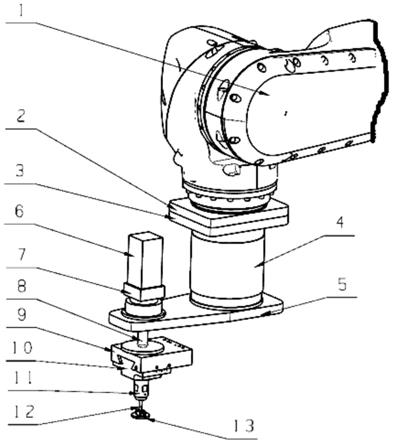
12.图1为本发明的整体结构示意图;
13.图2为本发明的夹具部分的放大示意图;
14.图3为本发明上滑块、下滑块剖视图的放大示意图;
15.图4为本发明的旋转轴与小工具磨头连接的放大示意图。
16.图中,1.六轴机器人;2.机器人安装板;3.动态力位执行器安装板;4.动态力位执行器;5.夹具安装板;6.伺服电机;7.减速机;8.连接轴;9.上滑块;10.下滑块;11.小工具安装座;12.旋转轴;13.小工具磨头;14.固定块1;15.固定块2;16.调节螺栓;17、侧边螺钉;18、销轴;19、连接球;20、销座;21、嵌槽。
具体实施方式
17.以下实施例用于说明本发明,但不用来限制本发明的范围。
18.本发明的一种机器人恒压小工具抛光装置,包括六轴机器人,机器人安装板,动态力位执行器安装板,动态力位执行器,夹具安装板,伺服电机,减速机,连接轴,调节块,小工具安装座,旋转轴,小工具磨头,销接机构,所述六轴机器人端部与机器人安装板连接,机器人安装板与动态力位执行器安装板连接,动态力位执行器安装板与动态力位执行器顶部连接,动态力位执行器底部与夹具安装板连接,伺服电机与减速机连接,减速机通过夹具安装板与连接轴连接,连接轴通过安装盘与调节块顶部连接,调节块底部与小工具安装座连接,小工具安装座与旋转轴连接,旋转轴通过销接机构与小工具磨头连接,小工具磨头用于对工件抛光。
19.其中,所述调节块包括上滑块、下滑块、固定块1、固定块2、调节螺栓、侧边螺钉,下滑块顶部与上滑块接触,调节螺栓位于上滑块与下滑块之间,所述调节螺栓尾部插在固定块1内,固定块1固定在上滑块内,固定块2将固定块1固定定位,调节螺栓端部为螺纹杆,该螺纹杆插入下滑块的螺纹孔内;拧动调节螺栓,通过调节螺栓的螺纹杆与下滑块螺纹孔配合,使下滑块移动,形成上滑块与下滑块之间的相对运动,即能调节上滑块与下滑块的相对位置,调节完后用侧边螺钉定位,从而满足抛光时所需要的偏移量,从而保证小工具磨头能接触工件,实施抛光运作。
20.其中,所述销接机构包括销轴、连接球、销座、嵌槽,连接球与旋转轴底部连接,销轴固定在连接球两侧,且销轴垂直于旋转轴,所述销座与小工具磨头连接,嵌槽位于销座顶部;连接球与销轴嵌在销座顶部的嵌槽内,能保证旋转轴能定位在小工具磨头的中心点位;通过连接球嵌入嵌槽,旋转轴与小工具磨头没有沿销轴的轴向方向的相对移动,但能使销座绕销轴偏转,带动小工具磨头略微偏转,使得小工具磨头能更贴合工件曲率。
21.连接球和销轴与嵌槽之间没有刚性连接,也没有螺钉固定,只是嵌在销座顶部的嵌槽内,在没有运作的时候连接球与销轴会从嵌槽内脱离;实际使用的时候,连接球与销轴
嵌在嵌槽内,小工具磨头的底部接触工件,会有反作用力使得连接球和销轴与嵌槽之间一直保持接触,从而能够带动小工具磨头略微偏转,解决了小工具磨头贴合工件曲面运作的问题。
22.本发明工作过程:
23.1)六轴机器人1带动抛光装置移动;
24.2)伺服电机6通过减速机7带动连接轴8旋转,依次传递给上滑块9、下滑块10、小工具安装座11、旋转轴12;旋转轴12底部的销轴和连接球与小工具磨头13顶部的销座接触,不固定,通过销轴带动小工具磨头13旋转及移动;
25.3)下滑块10通过调节螺栓调节和上滑块9的相对位置,最后通过侧边螺丝锁紧;
26.4)动态力位执行器4能通过动态力位控制,实时计算分析保持恒定压力;
27.实施抛光运作时,连接球与销轴嵌在嵌槽内,小工具磨头的底部接触工件,会有反作用力使得连接球和销轴与嵌槽之间一直保持接触,从而能够带动小工具磨头略微偏转,解决了小工具磨头贴合工件曲面问题,能更加简洁使去除函数更稳定。
28.去除函数指的就是工具固定在一个点,单位时间去除材料的多少与离旋转轴中心距离的一个函数表现。
29.伺服电机:富士gys101d5
‑
rb2,但不限于该产品;
30.六轴机器人:kuka kr70 r2100,但不限于该产品;
31.动态力位执行器:xbang xpush125,但不限于该产品;
32.减速机:apex ad047
‑
10,但不限于该产品;
33.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。