1.本发明涉及线圈制备领域,具体涉及一种手指线圈的自动生产设备以及基于该自动生产设备的生产方法。
背景技术:
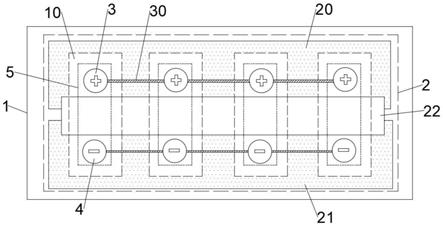
2.手指线圈装配于机械人手指上的线圈,在如图1所示的双层平面线圈1’的基础上通过冲压成一定弧度而成。现有技术中,手指线圈的冲压都是人工将双层平面线圈1’放到冲压机台上,通过冲压机台一次冲压成型,冲压形成的手指线圈2’如图2所示。
3.双层平面线圈1’基本采用手工绕线的方式进行制备,效率低,且品质不一。同时,手指线圈的绕线、冲压等操作也都是分开进行,具有作业工位多、生产时间长、占用面积大等缺陷。
技术实现要素:
4.为此,本发明提供一种手指线圈的自动生产设备以及基于该自动生产设备的生产方法,能够很好的解决上述问题。
5.为实现上述目的,本发明提供的技术方案如下:
6.一种手指线圈的自动生产设备,包括机壳、电子系统以及设置在机壳上并与电子系统连接的运作机构,所述运作机构包括绕线机构、导电机构、冲压机构、第一机械手、第二机械手和出料机构;
7.所述绕线机构包括相对设置的第一飞叉组件和第二飞叉组件;所述第一飞叉组件被配置为可在靠近或远离第二飞叉组件的方向活动,所述第一飞叉组件靠近第二飞叉组件并能够与第二飞叉组件共同组成绕线座,所述第一飞叉组件和第二飞叉组件上均设有以绕线座为中心进行旋转的飞叉架;
8.所述第一机械手对应绕线机构,具有线夹和剪切部;
9.所述导电机构设置于绕线机构的绕线座的下方位置,具有二组分别连接电源正负极的导电夹;
10.所述第二机械手设置于绕线机构和冲压机构之间,以将由绕线机构缠绕完成的线圈夹持至冲压机构的载台;
11.所述冲压机构包括导轨、载台、载台驱动装置和冲压组件,所述导轨具有一前端和后端,所述载台可滑动的装配于导轨上,所述载台驱动装置驱动连接所述载台以驱动载台在导轨的前端和后端之间往复移动,所述冲压组件对应导轨以对载台上的线圈进行冲压成型;
12.所述出料机构设置于冲压机构的导轨的后端,以将移动至导轨后端的载台上的线圈取出。
13.进一步的,所述第一飞叉组件包括第一固定座、具有一通孔的飞叉主轴、第一飞叉架、第一驱动装置和第一导向限位块;所述飞叉主轴可旋转的装配于第一固定座上,所述第
一驱动装置驱动连接飞叉主轴以驱动该飞叉主轴旋转,所述通孔在飞叉主轴的第一端部形成有作为进线口的开口,所述飞叉主轴上开设有一连通通孔的出线缺口;所述第一飞叉组件以绕线座为中心进行旋转的飞叉架为第一飞叉架;所述第一飞叉架上设有第一绕线芯轴并固定连接所述飞叉主轴;所述第一导向限位块可旋转的装配于飞叉主轴的第二端部,并开设有二个插孔;
14.所述第二飞叉组件包括第二固定座、连接轴、第二导向限位块、顶芯、第二飞叉架、第二驱动装置和第三驱动装置;所述第二固定座上固定有一固定座轴柱,所述第二导向限位块固定于固定座轴柱上并对应所述第一导向限位块,所述顶芯容置于第二导向限位块内,所述连接轴可伸缩活动的穿设于固定座轴柱内并连接所述顶芯,所述顶芯上固定有分别对应第一导向限位块上二个插孔的二个绕线针,所述第一飞叉组件靠近第二飞叉组件以使二个绕线针分别插入二个插孔内,第一导向限位块、第二导向限位块以及二者之间的绕线针形成绕线座;所述第二驱动装置驱动连接所述连接轴;
15.所述第二飞叉组件上以绕线座为中心进行旋转的飞叉架为第二飞叉架,所述第二飞叉架可旋转装配于固定座轴柱上,并固定有对应第一绕线芯轴的第二绕线芯轴以及对应第二绕线芯轴的卷线轮,所述第三驱动装置驱动连接所述第二飞叉架以驱动该第二飞叉架旋转。
16.进一步的,所述绕线机构还包括卷线轮驱动组件,所述卷线轮驱动组件被配置为可在靠近或远离卷线轮的方向活动,所述卷线轮驱动组件靠近所述卷线轮时能够与卷线轮形成驱动连接,以驱动卷线轮旋转。
17.进一步的,所述绕线机构还包括支撑组件,所述支撑组件设置于第二飞叉架的下方,所述支撑组件具有一可升降的顶块,所述第二飞叉架上设有与顶块相配合的限位缺口,所述顶块的上升能够顶触于第二飞叉架的限位缺口内以支撑所述第二飞叉架。
18.进一步的,定义平行于第一飞叉组件移动的水平移动方向为x轴方向,垂直于x轴方向的水平移动方向为y轴方向,竖直移动方向为z轴方向,所述第一机械手包括:剪切驱动气缸、机械手支架、弹性夹持块、具有剪切冲头的剪切架以及可沿x轴、y轴和z轴方向传动的三轴传动座,所述剪切驱动气缸固定于三轴传动座上,所述机械手支架固定于剪切驱动气缸的缸体上,且开设有沿x轴延伸的走线槽,所述弹性夹持块设置于机械手支架上,并通过弹力抵压于走线槽的一内侧壁上以夹持走线槽内的线,所述剪切架连接所述剪切驱动气缸的活塞杆,所述剪切架的剪切冲头紧贴于弹性夹持块的侧沿,所述剪切架与弹性夹持块上设有相抵触配合的抵触台阶,所述剪切驱动气缸的活塞杆的伸出能够驱动剪切冲头冲切被夹持的线,所述剪切驱动气缸的活塞杆的收缩能够带动剪切冲头以及弹性夹持块回缩以开启走线槽。
19.进一步的,所述导电机构包括升降驱动气缸、水平伸缩驱动气缸、夹持驱动气缸以及二组所述导电夹,所述升降驱动气缸驱动连接所述水平伸缩驱动气缸,所述水平伸缩驱动气缸驱动连接所述夹持驱动气缸,所述夹持驱动气缸设有二个,并分别驱动连接二组导电夹。
20.进一步的,定义平行于第一飞叉组件移动的水平移动方向为x轴方向,垂直于x轴方向的水平移动方向为y轴方向,竖直移动方向为z轴方向,所述第二机械手包括y轴传动座、z轴传动座、旋转气缸、夹持气缸以及二组爪夹,所述y轴传动座驱动连接所述z轴传动
座,所述z轴传动座驱动连接所述旋转气缸,所述旋转气缸驱动连接所述夹持气缸,所述夹持气缸驱动连接二组爪夹。
21.进一步的,所述冲压机构的冲压组件包括第一级冲压组件和第二级冲压组件,第一级冲压组件相对于第二级冲压组件更靠近于导轨的前端;所述第一级冲压组件具有对应载台上方的第一竖向冲压装置,所述第二级冲压组件包括对应载台上方的第二竖向冲压装置以及对应载台左右两侧的二个侧向冲压装置。
22.进一步的,所述冲压机构的载台包括载台板、固定于载台板上表面的凸台、固定于载台板下表面的滑块、升降驱动气缸、固定架以及限位针,所述滑块可滑动配合于导轨上,所述凸台的顶部形成有截面呈弧形的下模凸部,该下模凸部用于承接待冲压的线圈产品,所述下模凸部上还设有贯通至载台板下表面的二个通孔,所述限位针设有二个并分别可活动的穿设于二个通孔内;所述固定架固定于载台板的下表面,所述升降驱动气缸装配于固定架上并驱动连接二个限位针,以带动二个限位针进行同步升降,进而使限位针能够在伸出至凸出于下模凸部表面的伸出位置和回缩至载台内的缩进位置之间切换。
23.进一步的,所述出料机构包括推料板、推料驱动装置和升降驱动装置,所述推料板具有一与下模凸部的上表面的外形相适配的让位缺口,所述升降驱动装置驱动连接所述推料板以驱动推料板在下降至让位缺口抵触于下模凸部上和提升至脱离下模凸部之间切换,所述推料驱动装置驱动连接升降驱动装置以驱动推料板在下模凸部的上表面滑动以将下模凸部上的产品推落。
24.一种手指线圈的生产方法,包括如下步骤:
25.a1,提供上述任一所述的手指线圈的自动生产设备,将线穿入第一飞叉组件的飞叉架上;
26.a2,第一机械手的线夹将从绕线机构的第一飞叉组件的飞叉架穿出的线引至第二飞叉组件的飞叉架上实现穿线;
27.a3,第一机械手将第一飞叉组件和第二飞叉组件之间的线段下压;
28.a4,驱动第一飞叉组件靠近第二飞叉组件,以形成绕线座;
29.a5,第一机械手解除线的夹持;
30.a6,第一飞叉组件和第二飞叉组件的飞叉架以绕线座为中心进行旋转,将线缠绕至绕线座上;
31.a7,导电机构的二组导电夹分别夹住线圈的两端,第一机械手的剪切部将线剪断;
32.a8,导电机构开始通电,线圈通电发热,进而将外层的绝缘层熔化,相邻圈的绝缘层相熔接实现固定,此时形成双层平面线圈;
33.a9,第一飞叉组件远离第二飞叉组件方向移动,第二机械手将双层平面线圈夹持至冲压机构的载台;
34.a10,载台驱动装置驱动载台移动至对应冲压机构,冲压机构对双层平面线圈进行冲压成型,形成手指线圈成品;
35.a11,载台驱动装置驱动载台移动至导轨的后端,出料机构将载台上的线圈取出。
36.通过本发明提供的技术方案,具有如下有益效果:
37.开始生产时,先手动将线穿入绕线机构的第一飞叉组件的飞叉架上,此后即可实现自动化作业,其具体的作业步骤如上述的手指线圈的生产方法。能够自动且连续的完成
手指线圈的制备。
38.针对上述各机构的结构改进以及布局设置,将上述机构集成于一机壳内,通过自动化控制实现自动化生产,可实现手指线圈的自动化生产,具有集成小型化、效率高、节省人工等特点,且品质有保证。
附图说明
39.图1所示为背景技术中双层平面线圈的结构示意图;
40.图2所示为由图1结构冲压形成的手指线圈示意图;
41.图3所示为实施例中手指线圈的自动生产设备的结构示意图;
42.图4所示为实施例中绕线机构的立体结构示意图;
43.图5所示为实施例中绕线机构的在另一个角度的立体结构示意图;
44.图6所示为实施例中绕线机构的第二飞叉组件、卷线轮驱动组件以及支撑组件的装配结构示意图;
45.图7所示为实施例中第一飞叉组件的立体示意图;
46.图8所示为实施例中第一飞叉组件的剖视图;
47.图9所示为实施例中第二飞叉组件的立体结构示意图一;
48.图10所示为实施例中第二飞叉组件的立体结构示意图二;
49.图11所示为实施例中第二飞叉组件的剖视图;
50.图12所示为实施例中绕线机构在绕线状态下第一飞叉组件和第二飞叉组件相配合的剖视图;
51.图13所示为图12中a区域的放大示意图;
52.图14所示为实施例中第一机械手的立体结构示意图;
53.图15所示为实施例中导电机构的立体结构示意图;
54.图16所示为实施例中第二机械手的立体结构示意图;
55.图17所示为实施例中冲压机构和出料机构的装配结构示意图,其中载台位于导轨前端;
56.图18所示为实施例中冲压机构和出料机构的装配的部分结构示意图,其中载台对应第一级冲压组件;
57.图19所示为实施例中冲压机构和出料机构的装配的部分结构示意图,其中载台对应第二级冲压组件;
58.图20所示为实施例中冲压机构和出料机构的装配结构示意图,其中载台位于导轨后端;
59.图21所示为实施例中冲压机构和出料机构的装配结构的底部结构示意图;
60.图22所示为实施例中载台的结构示意图;
61.图23所示为实施例中载台的结构分解示意图;
62.图24所示为实施例中出料机构的结构示意图。
具体实施方式
63.为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部
分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
64.现结合附图和具体实施方式对本发明进一步说明。
65.参照图3至图24所示,本实施例提供一种手指线圈的自动生产设备,包括机壳3、电子系统(未示出)以及设置在机壳3上并与电子系统连接的运作机构,所述运作机构包括绕线机构、导电机构300、冲压机构、第一机械手200、第二机械手400和出料机构。
66.具体的,电子系统为现有技术中用于自动化设置中的plc控制系统,适用于本实施例中的控制时,只需适当的调整控制步骤、坐标等参数即可,此是本领域的技术人员在明白本技术的方案后能够自行实现的,在此不再详述。
67.具体的,所述机壳3设有一基板1,所述运作机构均设置于基板1上。
68.所述绕线机构包括相对设置的第一飞叉组件110和第二飞叉组件120;所述第一飞叉组件110被配置为可在靠近或远离第二飞叉组件12的方向活动,所述第一飞叉组件110靠近第二飞叉组件120并能够与第二飞叉组件120共同组成绕线座,所述第一飞叉组件110和第二飞叉组件120上均设有以绕线座为中心进行旋转的飞叉架。
69.所述第一机械手200对应绕线机构,具有线夹和剪切部,线夹用于夹持线,剪切部用于切断线。
70.所述导电机构300设置于绕线机构的绕线座的下方位置,具有二组分别连接电源正负极的导电夹340。
71.所述第二机械手400设置于绕线机构和冲压机构之间,以将由绕线机构缠绕完成的线圈夹持至冲压机构的载台510。
72.所述冲压机构包括导轨520、载台510、载台驱动装置530和冲压组件,所述导轨520具有一前端和后端,所述载台510可滑动的装配于导轨520上,所述载台驱动装置530驱动连接所述载台510以驱动载台510在导轨520的前端和后端之间往复移动,所述冲压组件对应导轨520以对载台510上的线圈进行冲压成型。
73.所述出料机构570设置于冲压机构的导轨的后端,以将移动至导轨后端的载台上的线圈取出。
74.本实施例还提供一种基于上述自动生产设备的手指线圈的生产方法,包括如下步骤:
75.a1,提供上述所述的手指线圈的自动生产设备,将线穿入第一飞叉组件110的飞叉架上。
76.a2,第一机械手200的线夹将从绕线机构的第一飞叉组件110的飞叉架穿出的线引至第二飞叉组件120的飞叉架上实现穿线。
77.a3,第一机械手200将第一飞叉组件110和第二飞叉组件120之间的线段下压。
78.a4,驱动第一飞叉组件110靠近第二飞叉组件120,以形成绕线座。
79.a5,第一机械手200解除线的夹持。
80.a6,第一飞叉组件110和第二飞叉组件120的飞叉架以绕线座为中心进行旋转,将线缠绕至绕线座上。
81.a7,导电机构300的二组导电夹340分别夹住线圈的两端,第一机械手200的剪切部
将线剪断。
82.a8,导电机构300开始通电,线圈通电发热,进而将外层的绝缘层熔化,相邻圈的绝缘层相熔接实现固定,此时形成如图1所示的双层平面线圈1’。
83.a9,第一飞叉组件110远离第二飞叉组件120方向移动,第二机械手400将双层平面线圈夹持至冲压机构的载台510;此时,第一机械手200、绕线机构和导电机构300可继续重复a1至a8的步骤,实现连续生产。
84.a10,载台驱动装置530驱动载台510移动至对应冲压机构,冲压机构对双层平面线圈进行冲压成型,形成手指线圈成品;
85.a11,载台驱动装置530驱动载台510移动至导轨的后端,出料机构570将载台上的线圈取出。
86.其中,上述步骤中,将第一飞叉组件110和第二飞叉组件120之间的线段下压至绕线座上。以连接至绕线座上的点为中点,将该线100分为位于第一飞叉组件110至线源头(如线卷)的第一部分以及位于第二飞叉组件120上的第二部分。缠绕时,第一部分的线作为双层平面线圈1’的其中一层,第二部分的线作为双层平面线圈1’的另一层。
87.针对上述各机构的结构改进以及布局设置,将上述机构集成于一机壳3内,通过自动化控制实现自动化生产,可实现手指线圈的自动化生产,具有集成小型化、效率高、节省人工等特点,且品质有保证。
88.详细参照附图4至图13所示,本实施例中绕线机构的详细结构为:所述第一飞叉组件110包括第一固定座111、具有一通孔1121的飞叉主轴112、第一飞叉架113、第一驱动装置115和第一导向限位块114;所述飞叉主轴112可旋转的装配于第一固定座111上,所述第一驱动装置115驱动连接飞叉主轴112以驱动该飞叉主轴112旋转,所述通孔1121在飞叉主轴112的第一端部形成有作为进线口的开口,所述飞叉主轴112上开设有一连通通孔1121的出线缺口1122;所述第一飞叉组件111以绕线座为中心进行旋转的飞叉架为第一飞叉架113;所述第一飞叉架113上设有第一绕线芯轴118并固定连接所述飞叉主轴112;所述第一导向限位块114可旋转的装配于飞叉主轴112的第二端部,并开设有二个插孔1141。具体的,第一导向限位块114通过轴承1142装配于飞叉主轴112的第二端部。穿线时,线100从飞叉主轴112的第一端部的开口穿入,经过飞叉主轴112的通孔1121后从出线缺口1122穿出,然后再穿入第一绕线芯轴118内。
89.所述第二飞叉组件120包括第二固定座121、连接轴124、第二导向限位块123、顶芯1231、第二飞叉架125、第二驱动装置1281和第三驱动装置1282;所述第二固定座121上固定有一固定座轴柱122,所述第二导向限位块123固定于固定座轴柱122上并对应所述第一导向限位块114,所述顶芯1231容置于第二导向限位块123内,所述连接轴124可伸缩活动的穿设于固定座轴柱122内并连接所述顶芯1231,所述顶芯1231上固定有分别对应第一导向限位块114上二个插孔1141的二个绕线针1232,所述第一飞叉组件110靠近第二飞叉组件120以使二个绕线针1232分别插入二个插孔1141内,第一导向限位块114、第二导向限位块123以及二者之间的绕线针1232形成绕线座;所述第二驱动装置1281驱动连接所述连接轴124,以带动顶芯1231伸出第二导向限位块123或回缩至第二导向限位块123。
90.所述第二飞叉组件120上以绕线座为中心进行旋转的飞叉架为第二飞叉架125,所述第二飞叉架125可旋转装配于固定座轴柱122上,并固定有对应第一绕线芯轴118的第二
绕线芯轴126以及对应第二绕线芯轴126的卷线轮127,所述第三驱动装置1282驱动连接所述第二飞叉架125以驱动该第二飞叉架125旋转。
91.具体的,因第一导向限位块114被顶芯1231的二个绕线针1232所插设固定,因此,飞叉主轴112旋转时,第一导向限位块114被固定而不随飞叉主轴112一起转动。
92.进一步的,本实施例中,所述第一飞叉组件110还包括第一从动轮1162,所述第一从动轮1162固定套接于飞叉主轴112上,所述第一驱动装置115为驱动电机并固定于第一固定座111上,所述第一驱动装置115的转轴上固定有第一主动轮1161,所述第一主动轮1161传动连接所述第一从动轮1162。具体的,第一从动轮1162为皮带从动轮,第一主动轮1161为皮带主动轮,第一主动轮1161通过皮带1162传动连接所述第一从动轮1162。结构简单、传动稳定。当然的,在其它实施例中,也可以采用链条传动结构、齿轮传动结构等来实现。
93.进一步的,本实施例中,所述第一飞叉组件110还包括第一定滑轮1171和第二定滑轮1172,所述第一定滑轮1171装配于飞叉主轴112的出线缺口1122上以连接从通孔1121穿出的线,所述第二定滑轮1172装配于第一飞叉架113上并对应第一绕线芯轴118的穿线孔。经出线缺口1122穿出的线绕至第一定滑轮1171上,再从第一定滑轮1171绕至第二定滑轮1172上,最后经第二定滑轮1172穿至第一绕线芯轴118内,实现导向,线不易断裂。当然的,在其它实施例中不局限于此。
94.进一步的,本实施例中,所述飞叉主轴112的通孔1121内设有一穿线管119,线从穿线管119内穿过,采用该穿线管119的结构,可根据线的粗细选择不同内管径的穿线管119,以保证能够与线相适配,使得该飞叉主轴112的通用性好。当然的,在其它实施例中,也可以无需采用穿线管的结构。
95.进一步的,本实施例中,还包括导轨131和第四驱动装置132,所述第一飞叉组件110的第一固定座111可滑动的装配于导轨131上,即第一飞叉组件110通过与导轨131的配合实现设置于基板1上。所述第四驱动装置132驱动连接所述第一固定座111,以驱动第一固定座111在导轨131上往复滑动,进而实现第一飞叉组件110在靠近或远离第二飞叉组件120的方向活动。具体的,所述第四驱动装置132为伸缩气缸,伸缩气缸的活塞固定连接第一飞叉组件110的第一固定座111,伸缩气缸的活塞的伸缩驱动第一飞叉组件110沿导轨131移动,实现该功能的结构简单、操作简便。当然的,在其它实施例中不局限于此。
96.进一步的,本实施例中,所述第二飞叉组件120还包括第二从动轮1292,所述第二从动轮1292可旋转的套接于固定座轴柱122上,所述第二飞叉架125固定连接所述第二从动轮1292,所述第三驱动装置1282为驱动电机并固定于第二固定座121上,所述第三驱动装置1282的转轴上固定有第二主动轮1291,所述第二主动轮1291传动连接所述第二从动轮1292。具体的,第二从动轮1292为皮带从动轮,第二主动轮1291为皮带主动轮,第二主动轮1291通过皮带1293传动连接所述第二从动轮1292。结构简单、传动稳定。当然的,在其它实施例中,也可以采用链条传动结构、齿轮传动结构等来实现。
97.进一步的,本实施例中,所述第二驱动装置1281为伸缩气缸,伸缩气缸的活塞杆连接连接轴124,活塞杆的伸缩驱动连接轴124和其上的顶芯1231靠近或远离第一导向限位块114。
98.进一步的,本实施例中,还包括卷线轮驱动组件140,所述卷线轮驱动组件140被配置为可在靠近或远离卷线轮127的方向活动,所述卷线轮驱动组件140靠近所述卷线轮127
时能够与卷线轮127形成驱动连接,以驱动卷线轮127旋转,实现将第二部分的线卷起备用。具体的,所述卷线轮驱动组件140具体包括导轨141、第三固定支架142、第五驱动装置143和第六驱动装置144,导轨141固定于基板1上,所述第三固定支架142可滑动的装配于导轨141上,所述第五驱动装置143驱动连接所述第三固定支架142,以驱动第三固定支架142在导轨141上滑动,进而实现第三固定支架142在靠近或远离所述卷线轮127。所述第六驱动装置144为驱动电机,所述第六驱动装置144固定于第三固定支架142上,当第三固定支架142靠近卷线轮127时,第六驱动装置144能够与卷线轮127形成驱动连接,并驱动卷线轮127旋转,以实现卷线功能。当然的,在其它实施例中,卷线轮127的旋转驱动结构不局限于此,也可以直接设置于第二飞叉组件120的第二固定座121上,或者可采用人力驱动等。
99.再进一步的,本实施例中,卷线轮驱动组件140在驱动卷线轮127旋转时,为保证第二飞叉组件120的稳定性,还增设有支撑组件150。具体的,所述支撑组件150设置于第二飞叉架125的正下方,所述支撑组件150具有一可升降的顶块151,所述第二飞叉架125上设有与顶块151相配合的限位缺口1251,所述顶块151的上升能够顶触于第二飞叉架125的限位缺口1251内以支撑所述第二飞叉架125,防止因卷线轮驱动组件140驱动卷线轮127旋转时产生的振动而导致第二飞叉组件120的各部件结构(尤其是绕线针1232)产生偏移。
100.再进一步的,本实施例中,所述第二飞叉组件120还包括电磁式张力器1271,所述电磁式张力器1271作用于卷线轮127上以对卷线轮127与绕线针1232之间的线(即第二部分的线)施加张力,绕线效果更好。具体的,卷线轮127和电磁式张力器1271是随第二飞叉架125一起转动的,为保证电磁式张力器1271的导电,所述第二固定座121与第二从动轮1292之间还设置有电刷1272,通过电刷1272的结构来为电磁式张力器1271供电,如此就不会产生电线缠绕的情况。
101.再进一步的,本实施例中,至于第一部分的线的张力则由进线端上的张力器600所提供。
102.定义平行于第一飞叉组件移动的水平移动方向为x轴方向,垂直于x轴方向的水平移动方向为y轴方向,竖直移动方向为z轴方向。
103.继续参照附图14所示,所述第一机械手200包括:剪切驱动气缸220、机械手支架230、弹性夹持块240、具有剪切冲头的剪切架250以及可沿x轴、y轴和z轴方向传动的三轴传动座210,所述剪切驱动气缸220固定于三轴传动座210上,所述机械手支架230固定于剪切驱动气缸220的缸体上,且开设有沿x轴延伸的走线槽231,所述弹性夹持块240设置于机械手支架230上,并通过弹力抵压于走线槽231的一内侧壁上以夹持走线槽231内的线,即该弹性夹持块240与走线槽231的内侧壁相抵触的配合结构形成第一机械手200的线夹。
104.所述剪切架250连接所述剪切驱动气缸220的活塞杆,所述剪切架250的剪切冲头紧贴于弹性夹持块240的侧沿,所述剪切架250与弹性夹持块240上设有相抵触配合的抵触台阶,即剪切架250上的抵触台阶251和弹性夹持块240上的抵触台阶241,所述剪切驱动气缸220的活塞杆的伸出能够驱动剪切冲头冲切被夹持的线(如图14所示即为剪切冲头冲切状态下的示意图),该剪切冲头的冲切结构即为第一机械手200的剪切部。所述剪切驱动气缸220的活塞杆的收缩能够带动剪切冲头以及弹性夹持块240回缩以开启走线槽231。具体的,剪切驱动气缸220的活塞杆收缩时,带动剪切架250回缩,剪切架250的回缩至一定距离后,剪切架250上的抵触台阶251与弹性夹持块240上的抵触台阶241相抵触配合,剪切架250
的继续回缩动作即可带动弹性夹持块240回缩以开启走线槽231。
105.该第一机械手200夹持作业时,剪切驱动气缸220先将活塞杆缩进,带动剪切冲头以及弹性夹持块240回缩以开启走线槽231,三轴传动座210带动机械手支架230移动至第一飞叉组件110的出线端(即第一绕线芯轴118的外端位置),使线穿设至走线槽231内,此时,剪切驱动气缸220驱动活塞伸出一定距离,使得剪切架250解除对弹性夹持块240的限制,弹性夹持块240通过弹力抵压于走线槽231的一内侧壁上以夹持走线槽231内的线;然后三轴传动座210带动机械手支架230实现在第二飞叉组件120上的穿线;完成第二飞叉组件120上的穿线后再次回缩弹性夹持块240,解除夹持。当需要将线压至绕线座时,三轴传动座210带动机械手支架230移动至线的上方,然后下移,将线压至第一导向限位块114的下方,此时驱动第一飞叉组件110靠近第二飞叉组件120移动,使绕线针1232插入第一导向限位块114的插孔1141,形成绕线座;最后三轴传动座210带动机械手支架230抽离,线通过张力自然的抵于绕线针1232上。之后即可进行绕线操作。完成绕线后,三轴传动座210带动机械手支架230移动至第一飞叉组件110的出线端(即第一绕线芯轴118的外端位置),重新夹持线,此时控制剪切冲头将线冲切断,线圈的两端进行下一个导电步骤;而留于机械手支架230并被夹持的线源头重新通过第一机械手200穿入第二飞叉组件120,等待下一个绕线操作。
106.该第一机械手200的结构,只需要一个剪切驱动气缸220就可以满足放线、夹线和剪线的功能,结构简单、设计巧妙。当然的,在其他实施例中,第一机械手200的结构不局限于此。
107.继续参照附图15所示,本实施例中,所述导电机构300包括升降驱动气缸310、水平伸缩驱动气缸320、夹持驱动气缸330以及二组所述导电夹340,所述升降驱动气缸310驱动连接所述水平伸缩驱动气缸320,所述水平伸缩驱动气缸320驱动连接所述夹持驱动气缸330,所述夹持驱动气缸330设有二个,并分别驱动连接二组导电夹340。
108.作业时,升降驱动气缸310先带动导电夹340上移至对应线的两端,然后水平伸缩驱动气缸320驱动导电夹340伸入,使线位于导电夹340内,最后夹持驱动气缸330驱动导电夹340夹持固定。结构简单、合理。当然的,在其它实施例中,导电机构300的结构不局限于此。
109.继续参照图16所示,本实施例中,所述第二机械手400包括y轴传动座410、z轴传动座420、旋转气缸430、夹持气缸440以及二组爪夹450,所述y轴传动座410驱动连接所述z轴传动座420,所述z轴传动座420驱动连接所述旋转气缸430,所述旋转气缸430驱动连接所述夹持气缸440,所述夹持气缸440驱动连接二组爪夹450。
110.作业时,第二飞叉组件120的第二驱动装置1281驱动连接轴124移动,使顶芯1231伸出第二导向限位块123;y轴传动座410驱动爪夹450靠近绕线座上的双层平面线圈,夹持气缸440驱动爪夹450夹持双层平面线圈,然后第二驱动装置1281驱动顶芯1231回缩至第二导向限位块123内,使绕线针1232脱离双层平面线圈;然后y轴传动座410返回至爪夹450侧向对应冲压机构的载台510的位置;旋转气缸430旋转以带动爪夹450和其上的双层平面线圈翻转,使得双层平面线圈放置于载台510上,然后夹持气缸440驱动爪夹450松开,y轴传动座410驱动爪夹450在水平方向上抽离,旋转气缸430驱动爪夹450返回,完成一个周期的动作。具体的,z轴传动座420在上述动作中起到调整爪夹450的高度的作用,可根据实际情况进行驱动调整。
111.当然的,在其他实施例中,第二机械手400的结构不局限于此。
112.继续参照图17至图23所示,进一步的,本实施例中,所述冲压机构的载台510包括载台板511、固定于载台板511上表面的凸台512、固定于载台板511下表面的滑块513、升降驱动气缸515、固定架514以及限位针517,所述滑块513可滑动配合于导轨520上,所述凸台513的顶部形成有截面呈弧形的下模凸部5121,该下模凸部5121用于承接待冲压的线圈产品(即由第二机械手400转移的双层平面线圈),所述下模凸部5121上还设有贯通至载台板511下表面的二个通孔(未示出),所述限位针517设有二个并分别可活动的穿设于二个通孔内;所述固定架514固定于载台板511的下表面,所述升降驱动气缸515装配于固定架514上并驱动连接二个限位针517,以带动二个限位针517进行同步升降,进而使限位针517能够在伸出至凸出于下模凸部5121表面的伸出位置和回缩至载台510内的缩进位置之间切换。载台510的二个限位针517伸出以限制线圈的内圈的两端,进而固定住线圈;二个限位针517的回缩实现解除对线圈的固定。
113.具体的,所述第二驱动装置515为伸缩气缸,所述伸缩气缸的活塞杆连接一连接板516,二个限位针517的下端均固定于连接板516上,所述伸缩气缸驱动活塞杆的升降能够同步带动二个限位针517动作。
114.进一步的,本实施例中,所述冲压机构的冲压组件包括第一级冲压组件和第二级冲压组件,所述第一级冲压组件相对于第二级冲压组件更靠近于导轨520的前端;所述第一级冲压组件具有对应载台510上方的第一竖向冲压装置540,所述第二级冲压组件包括对应载台510上方的第二竖向冲压装置550以及对应载台510左右两侧的二个侧向冲压装置560。
115.冲压时,第一驱动装置530驱动载台510移动至导轨520的前端,操作人员或机械手将待冲压的线圈(即如图1所示的双层平面线圈1’)放置载台510的下模凸部5121上,无遮挡,上料安全、方便;载台510的二个限位针517伸出以限制线圈的内圈的两端,进而固定住线圈;然后,第一驱动装置530驱动载台先移动至对应第一级冲压组件的位置,第一级冲压组件的第一竖向冲压装置540对线圈进行第一次冲压,使该线圈初步弯曲;然后再移动至对应第二级冲压组件的位置,第二级冲压组件的第二竖向冲压装置550和左右两个侧向冲压装置560分别对线圈进行冲压,第二竖向冲压装置550向下冲压线圈,左右两个侧向冲压装置560分别对线圈的左右两侧进行侧向冲压;冲压后形成所需的手指线圈的形状;冲压后手指线圈的结构稳定,分多次冲压,冲压力度可适当减轻,线圈不易散架、不易变形。
116.进一步的,本实施例中,所述第一驱动装置530包括驱动电机531、丝杆532和丝杆螺母533,所述丝杆532与导轨520相平行设置,所述驱动电机531驱动连接所述丝杆532以带动丝杆532旋转,所述丝杆螺母533旋接于丝杆532上并固定连接所述载台510。采用该种结构来实现驱动载台移动,结构简单,且控制精度高。当然的,在其它实施例中,也可以采用伸缩驱动类(如伸缩气缸)来直接驱动。
117.进一步的,本实施例中,所述第一级冲压组件的第一竖向冲压装置540和第二级冲压组件的第二竖向冲压装置550均包括上冲压头以及驱动连接上冲压头的的冲压气缸,即第一竖向冲压装置540的上冲压头542和冲压气缸541;第二竖向冲压装置550的上冲压头552和冲压气缸551。所述上冲压头542、552具有一与下模凸部5121的上表面的外形相适配的冲压底面。
118.同样的,所述第二级冲压组件的二个侧向冲压装置560均包括侧冲压头562以及驱
动连接侧冲压头562的的冲压气缸561,对应载台左侧的侧向冲压装置560的侧冲压头562具有一对应下模凸部5121的左侧面并与之相适配的冲压侧面;对应载台右侧的侧向冲压装置560的侧冲压头562具有一对应下模凸部5121的右侧面并与之相适配的冲压侧面。
119.具体的,所述基板1上还固定有一安装架2,所述第一级冲压组件的第一竖向冲压装置540和第二级冲压组件的第二竖向冲压装置550均设置于安装架2上,方便装配。
120.第一次冲压时,第一级冲压组件的第一竖向冲压装置540的冲压气缸541驱动上冲压头542下降实现对载台510的下模凸部5121上的线圈进行向下冲压,进行初步定型,使线圈具有一定的弯曲度。第二次冲压时,第二级冲压组件的第二竖向冲压装置550的冲压气缸551驱动上冲压头552下降实现对载台的下模凸部5121上的线圈进行向下冲压;左右两侧的侧向冲压装置560的冲压气缸561分别驱动侧冲压头562冲压线圈的左右两侧,实现最终的定型,装置结构简单,容易实现。
121.当然的,在其它实施例中,第一级冲压组件和/或第二级冲压组件的结构不局限于此。
122.继续参照附图24所示,进一步的,所述出料机构570包括推料板571、推料驱动装置572和升降驱动装置573,所述推料板570具有一与下模凸部5121的上表面的外形相适配的让位缺口5711,所述升降驱动装置573驱动连接所述推料板571以驱动推料板571在下降至让位缺口5711抵触于下模凸部5121上和提升至脱离下模凸部5121之间切换,所述推料驱动装置572固定于安装架2上,所述推料驱动装置572驱动连接升降驱动装置573以驱动推料板571在下模凸部5121的上表面滑动以将下模凸部5121上的产品推落。具体的,推料时,二个限位针517需要进行回缩至载台内的缩进位置,如此才能够解除对线圈的锁定。
123.具体的,推料驱动装置572为水平伸缩设置的伸缩气缸,升降驱动装置573为竖直伸缩设置的伸缩气缸,伸缩气缸能够在市面上直接购买得到,无需定制,容易实现。
124.当然的,在其它实施例中不局限于此。
125.进一步的,本实施例中,还包括出料导料板580,所述出料导料板580对应设置于出料机构570的后端,经出料机构570推出的线圈落至出料导料板580上,并经出料导料板580导向出货。
126.尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。