1.本实用新型涉及一种用于遥控器组装的抓取装置,属于机械自动化领域。
背景技术:
2.遥控器在组装时,需要经过多道工序,每道工序需要组装不同的零部件,目前多数情况下是在通过人工抓取各个零部件并对其进行组装,人工抓取效率低,同时也难以保证抓取精度,容易将各个部件拿错,难以实现批量生产。
技术实现要素:
3.本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理的用于遥控器组装的抓取装置。
4.本实用新型解决上述问题所采用的技术方案是:该用于遥控器组装的抓取装置,包括抓取支架,其结构特点在于:还包括滑动机构、升降机构和抓取机构,所述滑动机构安装在抓取支架上,所述升降机构安装在滑动机构上,所述抓取机构安装在升降机构上。
5.进一步地,所述滑动机构包括抓取滑动滑轨、抓取滑动滑块、抓取滑动滑座和抓取滑动气缸,所述抓取滑动滑轨安装在抓取支架上,所述抓取滑动滑块安装在抓取滑动滑轨上,所述抓取滑动滑座安装在抓取滑动滑块上,所述抓取滑动气缸与抓取滑动滑座连接,所述升降机构安装在抓取滑动滑座上。
6.进一步地,所述升降机构包括抓取升降滑轨、抓取升降滑块、抓取升降滑座和抓取升降气缸,所述抓取升降滑轨安装在抓取滑动滑座上,所述抓取升降滑块安装在抓取升降滑轨上,所述抓取升降滑座安装在抓取升降滑块上,所述抓取升降气缸与抓取升降滑座连接,所述抓取机构安装在抓取升降滑座上。
7.进一步地,所述抓取机构包括抓取调节架、抓取横杆座、抓取气缸和抓取夹爪,所述抓取调节架安装在抓取升降滑座上,所述抓取横杆座安装在抓取调节架上,所述抓取气缸安装在抓取横杆座上,所述抓取夹爪安装在抓取气缸上。
8.进一步地,所述抓取调节架呈l型结构设置。
9.进一步地,所述抓取横杆座的两端各安装有一个抓取气缸。
10.进一步地,还包括抓取物料盘,所述抓取夹爪位于抓取物料盘的上方。
11.进一步地,所述抓取夹爪包括一号夹爪体和二号夹爪体,所述一号夹爪体和二号夹爪体相对设置。
12.进一步地,所述一号夹爪体和二号夹爪体均呈l型结构设置。
13.进一步地,所述抓取滑动滑座和抓取升降滑座上均安装有感应限位器。
14.相比现有技术,本实用新型具有以下优点:该用于遥控器组装的抓取装置在工作时,通过抓取滑动气缸驱动抓取滑动滑座、并将抓取滑动滑座置于抓取物料盘的上方,通过抓取升降气缸驱动抓取升降滑座、并将抓取升降滑座驱动至可取料的位置,通过抓取气缸驱动抓取夹爪对遥控器的零部件进行夹取,夹取后通过升降机构将抓取机构提升,再通过
滑动机构将升降机构移动至下一工序,在抓取滑动滑座和抓取升降滑座上均安装有感应限位器可对抓取滑动滑座和抓取升降滑座起到保护作用、以免移动过程中抓取滑动滑座和抓取升降滑座撞击损坏,同时该用于遥控器组装的抓取装置可代替人工操作减少了人力成本的投入,保证产能,提高了工作效率。
附图说明
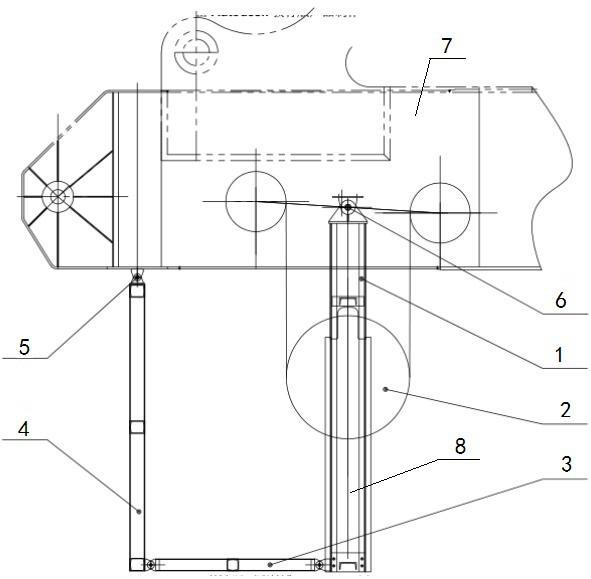
15.图1是本实用新型实施例的用于遥控器组装的抓取装置的立体结构示意图。
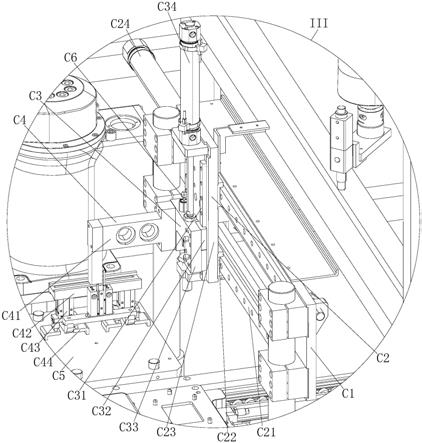
16.图2是图1中的iii部放大结构示意图。
17.图中:抓取支架c1、滑动机构c2、升降机构c3、抓取机构c4、抓取物料盘c5、感应限位器c6、
18.抓取滑动滑轨c21、抓取滑动滑块c22、抓取滑动滑座c23、抓取滑动气缸c24、
19.抓取升降滑轨c31、抓取升降滑块c32、抓取升降滑座c33、抓取升降气缸c34、
20.抓取调节架c41、抓取横杆座c42、抓取气缸c43、抓取夹爪c44。
具体实施方式
21.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
22.实施例。
23.参见图1至图2所示,须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。同时,本说明书中若有引用如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
24.本实施例中的用于遥控器组装的抓取装置,包括抓取支架c1、滑动机构c2、升降机构c3、抓取机构c4和抓取物料盘c5,滑动机构c2安装在抓取支架c1上,升降机构c3安装在滑动机构c2上,抓取机构c4安装在升降机构c3上。
25.本实施例中的滑动机构c2包括抓取滑动滑轨c21、抓取滑动滑块c22、抓取滑动滑座c23和抓取滑动气缸c24,抓取滑动滑轨c21安装在抓取支架c1上,抓取滑动滑块c22安装在抓取滑动滑轨c21上,抓取滑动滑座c23安装在抓取滑动滑块c22上,抓取滑动气缸c24与抓取滑动滑座c23连接,升降机构c3安装在抓取滑动滑座c23上。
26.本实施例中的升降机构c3包括抓取升降滑轨c31、抓取升降滑块c32、抓取升降滑座c33和抓取升降气缸c34,抓取升降滑轨c31安装在抓取滑动滑座c23上,抓取升降滑块c32安装在抓取升降滑轨c31上,抓取升降滑座c33安装在抓取升降滑块c32上,抓取升降气缸c34与抓取升降滑座c33连接,抓取机构c4安装在抓取升降滑座c33上。
27.本实施例中的抓取机构c4包括抓取调节架c41、抓取横杆座c42、抓取气缸c43和抓取夹爪c44,抓取调节架c41安装在抓取升降滑座c33上,抓取横杆座c42安装在抓取调节架
c41上,抓取气缸c43安装在抓取横杆座c42上,抓取夹爪c44安装在抓取气缸c43上。
28.本实施例中的抓取调节架c41呈l型结构设置,抓取横杆座c42的两端各安装有一个抓取气缸c43,抓取夹爪c44位于抓取物料盘c5的上方,抓取夹爪c44包括一号夹爪体和二号夹爪体,一号夹爪体和二号夹爪体相对设置,一号夹爪体和二号夹爪体均呈l型结构设置,抓取滑动滑座c23和抓取升降滑座c33上均安装有感应限位器c6。
29.具体的说,该用于遥控器组装的抓取装置在工作时,通过抓取滑动气缸c24驱动抓取滑动滑座c23、并将抓取滑动滑座c23置于抓取物料盘c5的上方,通过抓取升降气缸c34驱动抓取升降滑座c33、并将抓取升降滑座c33驱动至可取料的位置,通过抓取气缸c43驱动抓取夹爪c44对遥控器的零部件进行夹取,夹取后通过升降机构c3将抓取机构c4提升,再通过滑动机构c2将升降机构c3移动至下一工序,在抓取滑动滑座c23和抓取升降滑座c33上均安装有感应限位器c6可对抓取滑动滑座c23和抓取升降滑座c33起到保护作用、以免移动过程中抓取滑动滑座c23和抓取升降滑座c33撞击损坏,同时该用于遥控器组装的抓取装置可代替人工操作减少了人力成本的投入,保证产能,提高了工作效率。
30.此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。