1.本实用新型涉及医疗器械领域,特别涉及一种用于药物混合及注射的装置及系统。
背景技术:
2.近年来,由于临床用药不断增多,特别是新药临床应用的日益广泛,药物配伍也日趋复杂,用药安全性和不良反应也越来越引起医务工作者的重视,特别是静脉输液药物的配伍直接关系到医疗安全。传统手工药物配伍操作常常会出现因静脉注射药物选择溶解溶媒不当、溶解方法不妥、选择液体不当以及同瓶输液中添加药物种类过多、加入量过大、中西药随意混合、药物间存在配伍禁忌等多种原因, 导致输液变混、变色、出现结晶发生沉淀等现象,甚至因此引发医患矛盾和纠纷, 给医院带来一定程度的经济损失。因此,药物配伍中的安全用药应引起重视。
技术实现要素:
3.为了解决上述技术问题,本实用新型中披露了一种用于药物混合及注射的装置及系统,本实用新型的技术方案是这样实施的:
4.一种用于药物混合及注射的装置,包括控制台和执行机构;所述控制台连接所述执行机构,所述执行机构包括电机、推动器、第一注射器和第二注射器,所述电机连接所述推动器,所述推动器连接所述第一注射器和所述第二注射器,所述控制台包括摇杆和驱动器,所述摇杆设置于所述控制台上,所述驱动器位于所述控制台内部;所述控制台内运行有上位控制程序,所述执行机构内运行有下位控制程序。
5.优选地,所述电机通过丝杆连接所述推动器,所述电机与所述丝杆间设置有同步齿轮。
6.优选地,所述控制台与所述执行机构通过信号线连接。
7.优选地,所述控制台包括速度控制旋钮和压力控制旋钮。
8.优选地,所述控制台还包括触摸显示屏。
9.优选地,还包括限位传感器;所述限位传感器位于所述执行机构内。
10.优选地,所述执行机构还包括串口显示屏;所述串口显示屏安装于所述执行机构上方。
11.实施本实用新型的技术方案可解决现有技术中由于人工操作导致的输液变混、变色、出现结晶发生沉淀的技术问题;实施本实用新型的技术方案,通过控制台和执行机构分离,实现无接触式无菌操作,药物混合更安全;压力控制旋钮和速度控制旋钮可实时调节电机运行最大速度,摇杆可实时控制电机运动方向和速度,电机传动丝杠推动注射器进行药物混合,精确的速度控制可准确控制混合药物剂量和注射速度;两个旋钮和一个摇杆即可精确控制药物混合剂量,操作便捷,电机速度和其他状态以及药物流量反馈在控制台的触摸显示屏和执行机构串口显示屏上,闭环控制,控制更稳定可靠。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一种实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
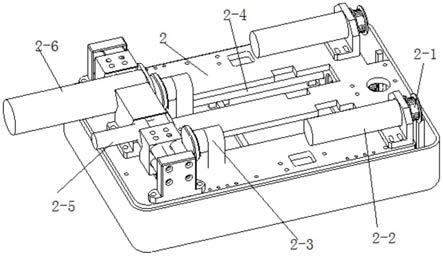
14.图1为执行机构内部结构示意图;
15.图2为执行机构整体结构示意图;
16.图3为控制台结构示意图;
17.图4为最必要原始技术方案流程示意图;
18.图5为驱动控制初始化详细控制流程示意图;
19.图6为驱动器详细控制流程事宜图。
20.在上述附图中,各图号标记分别表示:
21.1 控制台
[0022]1‑
1 速度控制旋钮
[0023]1‑
2 压力控制旋钮
[0024]1‑
3 触摸显示屏
[0025]1‑
4 摇杆
[0026]
2 执行机构
[0027]
同步齿轮 2
‑1[0028]
电机 2
‑2[0029]
推动器 2
‑3[0030]
丝杆 2
‑4[0031]
第一注射器 2
‑5[0032]
第二注射器 2
‑6[0033]
串口显示屏 2
‑7具体实施方式
[0034]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0035]
实施例1
[0036]
在一种具体的实施例1中,如图1和图2所示,一种用于药物混合及注射的装置,包括控制台1和执行机构2;所述控制台1连接所述执行机构2,所述执行机构2包括电机2
‑
2、推动器2
‑
3、第一注射器2
‑
5和第二注射器2
‑
6,所述电机2
‑
2连接所述推动器2
‑
3,所述推动器2
‑
3连接所述第一注射器2
‑
5和所述第二注射器2
‑
6,所述控制台1包括摇杆1
‑
4和驱动器,所
述摇杆1
‑
4设置于所述控制台1上,所述驱动器位于所述控制台1内部;所述控制台1内运行有上位控制程序,所述执行机构内运行有下位控制程序。
[0037]
在本实施例中,控制台1和执行机构2分离,控制台1远程控制执行机构2 运行完成远程药物混合的步骤,减少了人工操作引起的误差,控制台1中的驱动器发出信号给执行机构,然后执行机构2的电机2
‑
2提供动力给推动器2
‑
3,推动器2
‑
3带动第一注射器2
‑
5和第二注射器2
‑
6进行药物混合,这些步骤都有赖于上位控制程序和下位控制程序实现,摇杆1
‑
4用于人工控制电机转动方向,向前推,电机向前转动,向后推,电机向后转,与传统技术相比,本实施例操作便捷,可实现无接触式无菌药物注射操作。
[0038]
在一种优选的实施方式中,所述电机2
‑
2通过丝杆2
‑
4连接所述推动器,所述电机2
‑
2与所述丝杆2
‑
4间设置有同步齿轮2
‑
1。
[0039]
丝杆2
‑
4是将旋转运动转换成线性运动,或将扭矩转换成轴向反复作用力,同时兼具高精度、可逆性和高效率的特点。由于具有很小的摩擦阻力,便于控制台精确控制执行机构的运行状态。
[0040]
在一种优选的实施方式中,所述控制台1与所述执行机构2通过信号线连接。
[0041]
信号线连接比无线连接延迟更小,控制力度更加精确,便于控制台精准控制执行机构的运行状态。
[0042]
在一种优选的实施方式中,所述控制台1包括速度控制旋钮1
‑
1和压力控制旋钮1
‑
2。
[0043]
通过控制台的速度控制旋钮1
‑
1和压力控制旋钮1
‑
2来设置执行机构的电机 2
‑
2最大运行速度,然后通过摇杆1
‑
4控制可以达到精确的混合药物剂量控制,精确的注射速度控制的效果。
[0044]
在一种优选的实施方式中,所述控制台1还包括触摸显示屏1
‑
3。
[0045]
触摸显示屏1
‑
3用于设置系统参数和显示系统状态。
[0046]
在一种优选的实施方式中,还包括限位传感器;所述限位传感器位于所述执行机构2内。
[0047]
限位传感器具有感应注射器的状态和限位推动器的功能,保障了设备运行的安全。
[0048]
在一种优选的实施方式中,如图3所示,所述执行机构2还包括串口显示屏 2
‑
7;所述串口显示屏2
‑
7安装于所述执行机构2上方。
[0049]
串口显示屏2
‑
7用于显示执行机构2限位传感器状态和电机2
‑
2运行速度和运行距离。
[0050]
实施例2
[0051]
在一种具体的实施例2中,如图4所示,一种用于药物混合及注射的系统,采用一种用于药物混合及注射的装置,包括流程如下:
[0052]
a.开始供电;
[0053]
b.驱动器同时执行运行上位机程序和运行下位机程序;
[0054]
上位控制程序:
[0055]
c.运行上位控制程序;
[0056]
d.界面显示初始化;
[0057]
e.输入约束因素选项;
[0058]
f.与下位机建立通信;
[0059]
g.发送约束因素至下位机,接收下位机数据,并显示;
[0060]
下位控制程序:
[0061]
i.驱动器初始化;
[0062]
j.与控制台建立通信;
[0063]
k.根据实时获取的驱动器、传感器数据设置系统状态;
[0064]
l.接收控制台发送的数据,并将当前系统状态等数据发送至控制台。
[0065]
本实施例给出了一种具体的方案,通过使用一种用于药物混合及注射的装置,来达到实现无接触式无菌药物配伍操作,精确的混合药物剂量控制,精确的注射速度控制的效果,本技术方案操作简单,便于使用。
[0066]
在一种优选的实施方式中,如图5所示,所述驱动器初始化步骤如下:
[0067]
i1.分析驱动器状态;
[0068]
i2.判断是否收到驱动器的数据;收到则执行i3;没有收到驱动器数据,则执行i11;
[0069]
i3.将电机能否接收指令ready变量置真;
[0070]
i4.发送清除错误指令,以及代表上使能的指令06,07,0f;
[0071]
i5.将电机设置为速度模式;
[0072]
i6.设置速度为0;
[0073]
i7.设置加减速并打开pdo数据传输;
[0074]
i8.电机初始化完成,将代表初始化是否完成的变量init和代表电机是否使能的变量enable置真;
[0075]
i9.判断电机和控制器通信是否超时,超时则执行i12,没有超时则执行i10;
[0076]
i10.上报电机当前状态;
[0077]
i11.判断电机和控制器通信是否超时,超时则执行i12,没有超时则执行i1;
[0078]
i12.上报电机超时信息。
[0079]
在本实施方式中,驱动器初始化是在电机每次上电,和发生错误之后,急停之后会有的操作,这样一方面可以减少因为误操作导致的药物浪费,另一方面也是为了防止操作失误导致的设备损坏。
[0080]
在一种优选的实施方式中,如图6所示,所述k步骤中驱动器控制步骤如下:
[0081]
k1.分析系统状态;
[0082]
k2.读取速度和压力旋钮模拟量电压值并换算成电机运行速度的百分比系数;
[0083]
k3.读取模拟量电压值并换算成速度值赋值给一个全局变量;
[0084]
k4.判断是否急停,急停则执行k1,没有急停则执行k5;
[0085]
k5.分析驱动器状态;
[0086]
k6.判断驱动器和控制器通信是否超时,超时测执行k12,没有超时则执行 k7;
[0087]
k7.判断制动按钮是否按下,按下则执行k8,没有按下则执行k11;
[0088]
k8.判断限位传感器是否触发,没有触发则执行k9,并发送给驱动器,限位传感器触发则执行k11;
[0089]
k9.读取速度全局变量的值,并发送给驱动器;
[0090]
k10.上报电机当前状态和传感器当前状态;
[0091]
k11.将电机速度设置为0;
[0092]
k12.尝试驱动器初始化。
[0093]
本实施方式给出了一种具体的中驱动器控制运行的步骤,通过设备中设定相应的程序,来完成药物混合注射所必须的操作,另外其中还包括有错误纠正等各种步骤,防止误操作或设备损坏导致药物混合或注射出现问题。
[0094]
需要指出的是,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。