1.本发明涉及汽车精度测控技术领域,具体涉及一种矩阵测量平台及其测量方法。
背景技术:
2.汽车研发试制过程中,需要对车身的精度进行质量控制,其中焊接车身精度的测量至关重要,其精度直接影响整车的质量,对焊接车身精度检验是整车质量控制的重要保证。因焊接车身测量范围大、测点分布多,如何精确测量一直是业内的难点。业内通行的测量方法大型测量设备一次性测量或是小型设备连续跳转扩展量程分多次测量。前者投入大且测点难以全覆盖;后者连续跳转多次测量误差累计大且工作效率不高
技术实现要素:
3.基于上述技术问题,本发明提供一种矩阵测量平台及其测量方法,该矩阵测量平台具有统一的基准体系,依托统一的基准体系,能便携地实现大范围任意测量,作业效率高、精准可靠。
4.具体的,本发明提供的矩阵测量平台,其包括测量平台以及矩阵测量装置;
5.所述矩阵测量装置包括:
6.基准矩阵,所述基准矩阵设于所述测量平台上,用以作为测量基准;
7.测量装置,用以定位并连接焊接车身架;
8.所述测量装置包括测量支架,该测量支架作为焊接车身架的支撑平台;
9.以及定位销,所述定位销设置于该测量支架上,用以与焊接车身架基准孔连接。
10.所述测量装置形成支撑焊接车身和测量的工作平台,基准矩阵按矩阵分布在测量平台上,构建测量的基准体系,其中测量装置的定位销对于模拟车身基准点,在测量过程中对车身固定至关重要。
11.进一步的,所述基准矩阵包括若干呈阵列分布的基准点,所述基准点为基准球或基准锥。
12.进一步的,所述测量支架为圆柱体。
13.进一步的,所述测量支架设置有四个,四个所述测量支架布置形成矩形测量面。
14.进一步的,所述定位销在所述测量支架上的位置可调节。
15.本发明还提供一种利用上述矩阵测量平台进行的测量方法,其包括如下步骤:
16.根据焊接车身架基准孔位置调整测量装置位置,以使所述测量装置的定位销与所述焊接车身架基准孔连接并支撑所述焊接车身;
17.将测量装置在矩阵平台上固定,并建立整车坐标系;
18.在整车坐标系下进行基准矩阵扩展;
19.利用基准矩阵拟合建立整车坐标系,并利用该整车坐标系对车身进行测量。
20.本发明通过按照焊接车身的基准孔(也即rps点)位置调整定位销的高度位置以及定位销之间的水平位置,以满足车身的基准孔之间的相互位置关系,并以定位销为基准元
素,拟合法建立整车坐标系,也即在测量平台上固定了整车坐标系。
21.基准矩阵扩展是将基准孔的基准值扩展到测量平台分布的基准矩阵,也即对基准矩阵的坐标赋值,用精密测量设备在以定位销为基准元素的整车坐标系下测量基准矩阵,以符合定位销坐标值的矩阵法线性变换方式,测量基准矩阵,并赋予基准矩阵以测量的坐标值。因此,基准矩阵扩展等同于焊接车身rps点基准点的扩展。
22.为便于以后的使用,可将基准矩阵按照矩阵分布分类编号,以区分对应的赋值。
23.进一步的,在基准矩阵扩展之后,建立整车坐标系之前还包括逆向坐标系的建立;
24.所述逆向坐标系的建立包括:
25.以所述基准矩阵为坐标基准,调整矩阵测量装置位置定位销的位置;
26.再线性扩展所述定位销。
27.进行逆向坐标系的建立是为了适应其它车型,根据其它车型车身基准孔位置,调整定位销的高度位置以及相邻定位销之间的位置,定位销的线性扩展在统一的坐标系下,保持坐标特性不变。
28.进一步的,所述拟合建立整车坐标系包括任意选用三个以上不在同一直线上的基准点,构成坐标基准面。
29.采用便携测量机进行测量工作,将便携测量机固定放置在矩阵测量平台上,单机移动到任何位置,都可快速拟合坐标系(且是精准统一的坐标系),在整车坐标系下对焊接车身进行测量,实现统一坐标下全方位、大范围的精准测量。
30.相较于现有技术,本发明提供的矩阵测量平台及其测量方法具有如下优点:
31.本发明的矩阵测量平台具有统一的基准体系,保证测量精度,同时其矩阵测量装置可根据焊接车身rps点调整,有利于测量设备在大范围内的任意测量操作,解决了连续跳转多次测量的误差累计大和测量效率慢的缺陷;
32.同时,本发明利用矩阵线性变换扩展基准,可适应不同车型的测量,能快速地全覆盖测量点,测量数据覆盖率高,测量过程操作方便快捷、精准可靠。
附图说明
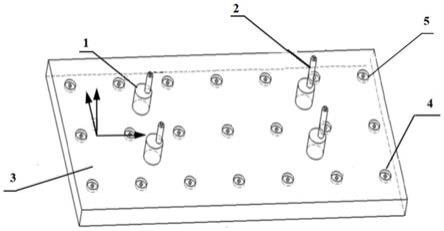
33.图1为本发明提供的矩阵测量平台的结构示意图;
34.图2为图1所示矩阵测量平台其矩阵测量装置的结构示意图;
35.图3为矩阵测量装置固定于矩阵平台的结构示意图;
36.图4为利用图1所示的矩阵测量平台测量焊机车声的状态示意图;
37.图5为整车坐标系下矩阵扩展原理示意图。
具体实施方式
38.为了更好地理解和实施,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
39.在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等,该术语指示的方位或位置关系的为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明
的限制。
40.如图1-4所示,本发明提供的矩阵测量平台,其包括测量平台3以及矩阵测量装置;
41.所述矩阵测量装置包括:
42.基准矩阵4,所述基准矩阵4设于所述测量平台上3,其包括若干呈矩阵分布的基准点5,用以作为测量基准,在本实施例中,基准点5为基准球,当然也可以为基准锥;
43.测量装置,用以定位并连接车身支架;
44.所述测量装置包括四个设置于所述测量平台3上的呈圆柱体状的测量支架1,该测量支架1用作焊接车身的支撑平台;以及定位销2,所述定位销2设置于该测量支架1上,用以与焊接车身架6基准孔连接,所述定位销2在所述测量支架上1的位置可调节。
45.采用前述提及的矩阵测量平台进行的测量方法,其包括如下步骤:
46.根据焊接车身架基准孔位置调整测量装置位置:根据焊接车身架基准孔(也即rps点)位置调整定位销2的高度位置以及定位销2之间的水平位置,以满足焊接车身架6的基准孔之间的相互位置关系;
47.将测量装置在矩阵平台上固定,并建立整车坐标系:将测量支架1固定在测量平台3的合适位置,并以定位销2为基准元素,拟合法建立整车坐标系,也即在测量平台3上固定了整车坐标系,
48.在整车坐标系下进行基准矩阵扩展:将基准孔的基准值扩展到测量平台分布的基准矩阵,也即对基准矩阵的坐标赋值,用精密测量设备在以定位销2为基准元素的整车坐标系下测量基准矩阵4,并赋予基准矩阵4以测量的坐标值,此坐标值符合定位销2坐标值的矩阵法线性变换,因此等同于焊接车身rps点基准点的扩展;
49.建立逆向坐标系:以所述基准矩阵为坐标基准,调整矩阵测量装置其定位销2的位置,按照焊接车身rps点坐标调整,再线性扩展所述定位销2,结合图5,rps点由4各(p1-p4为2x2矩阵)线性扩展成16个(p1-p16wei4x4矩阵),此时所有rps点的基准点坐标特性保持不变,也即仍处于统一的坐标系下;
50.利用基准矩阵拟合建立整车坐标系,并利用该整车坐标系对车身进行测量:采用拟合法,任意选用三个以上不在同一直线上的基准点,建立坐标系,然后将便携测量机固定放置在矩阵测量平台旁边,在建立的坐标系下对焊接车身进行测量。
51.上述提及的精密测量设备”是现有更高一级精度的测量设备。
52.比如要给基准矩阵的坐标赋值,希望相互坐标精度达到0.1mm,那在赋值测量基准矩阵时就要选用更高一级测量设备,其测量精度为要求的1/5(0.02mm)或更高,这样赋值测量才能准确无误,确保达到要求。
53.本发明的矩阵测量平台利用测量装置支撑并定位焊接车身,利用基准矩阵作为统一的基准体系,保证了测量精度,同时其测量装置在统一的基准体系下可根据焊接车身rps点调整位置,有利于测量设备在大范围内的任意测量操作,并适应不同车型的测量;测量设备在统一的基准体系(基准矩阵)下测量,测量精度精准恒定。
54.本发明的矩阵测量平台及其测量方法可做到测量精度≤0.15mm,解决了传统方式用连续跳转多次测量来扩展量程的误差累计大(误差累计无上限)和测量效率慢的缺陷;同时,本发明采用矩阵线性变换扩展基准矩阵,可适应不同车型的测量,能快速地全覆盖测量点,测量数据覆盖率高,测量过程操作方便快捷、精准可靠。
55.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
56.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
