1.本发明涉及一种脚轮,特别涉及一种脚轮双旋转装置。
背景技术:
2.脚轮有万向轮和单向轮。万向轮就是所谓的活动脚轮,它的结构允许水平360度旋转。脚轮是个统称,包括活动脚轮和固定脚轮。固定脚轮没有旋转结构,不能水平转动只能垂直转动。这两种脚轮一般都是搭配用的,比如手推车的结构是前边两个固定轮,后边靠近推动扶手的是两个活动万向轮。
3.现有的万向轮偏心距较大,当其使用在超重型机器人的底端转动时,在其转动摆向时,转动较为费力,因此本实用新型提出一种万向轮双旋转装置,其底端能够安装万向轮,解决万向轮偏心距较大的问题。
技术实现要素:
4.本实用新型的目的是提供一种降低轴承负载、减少转向摆头现象的脚轮双旋转装置。
5.本实用新型脚轮双旋转装置,包括第一板,第二板、第一转动组件和第二转动组件,第二板通过第二转动组件在支架上旋转,第一板通过第一转动组件在第二板上旋转。其中第一转动组件和第二组件是可以实现在平面上旋转功能的组件。
6.优选地,第二板包括第二上板和第二下板,第二上板和第二下板固定连接。第二上板和第二下板是两块板,固定在一起,组成第二板。
7.优选地,第二转动组件包括第二轴承组件、第二铆钉和第二轴承座,第二轴承座与支架固定连接,第二轴承组件设置在第二轴承座内,并可绕第二铆钉旋转。第二轴承组件可以包括一个轴承,也可以设置两个轴承。两个轴承之间由轴承座固定,位置相对固定。
8.优选地,第二轴承组件包括第二锥形轴承和第二平面推力轴承。
9.优选地,第一转动组件包括第一轴承组件、第一铆钉和第一轴承座,第一轴承座与第二板固定连接,第一轴承组件设置在第一轴承座内,并可绕第一铆钉旋转。第一轴承组件可以包括一个轴承,也可以设置两个轴承。两个轴承之间由轴承座固定,位置相对固定。
10.优选地,第一轴承组件包括第一锥形轴承和第一平面推力轴承。
11.优选地,第一铆钉与第二铆钉相对偏心设置。第一铆钉和第二铆钉的轴线不在一条直线上。
12.优选地,还包括第二加油嘴,第二加油嘴设置在第二轴承座上。
13.优选地,还包括第一加油嘴,第一加油嘴设置在第一轴承座上。
14.优选地,第一板和第二板为方形板。
15.本实用新型使用时其底端能够组装万向轮,有效节省转动力,上可偏心,随便加装;当其使用在机器人的底端时,能够使得摆点中和,方便转动,解决超重型的转动,降低偏心距,旋转转向节省力量。
附图说明
16.下面参照附图根据优选实施例对本实用新型进行详细描述和解释。
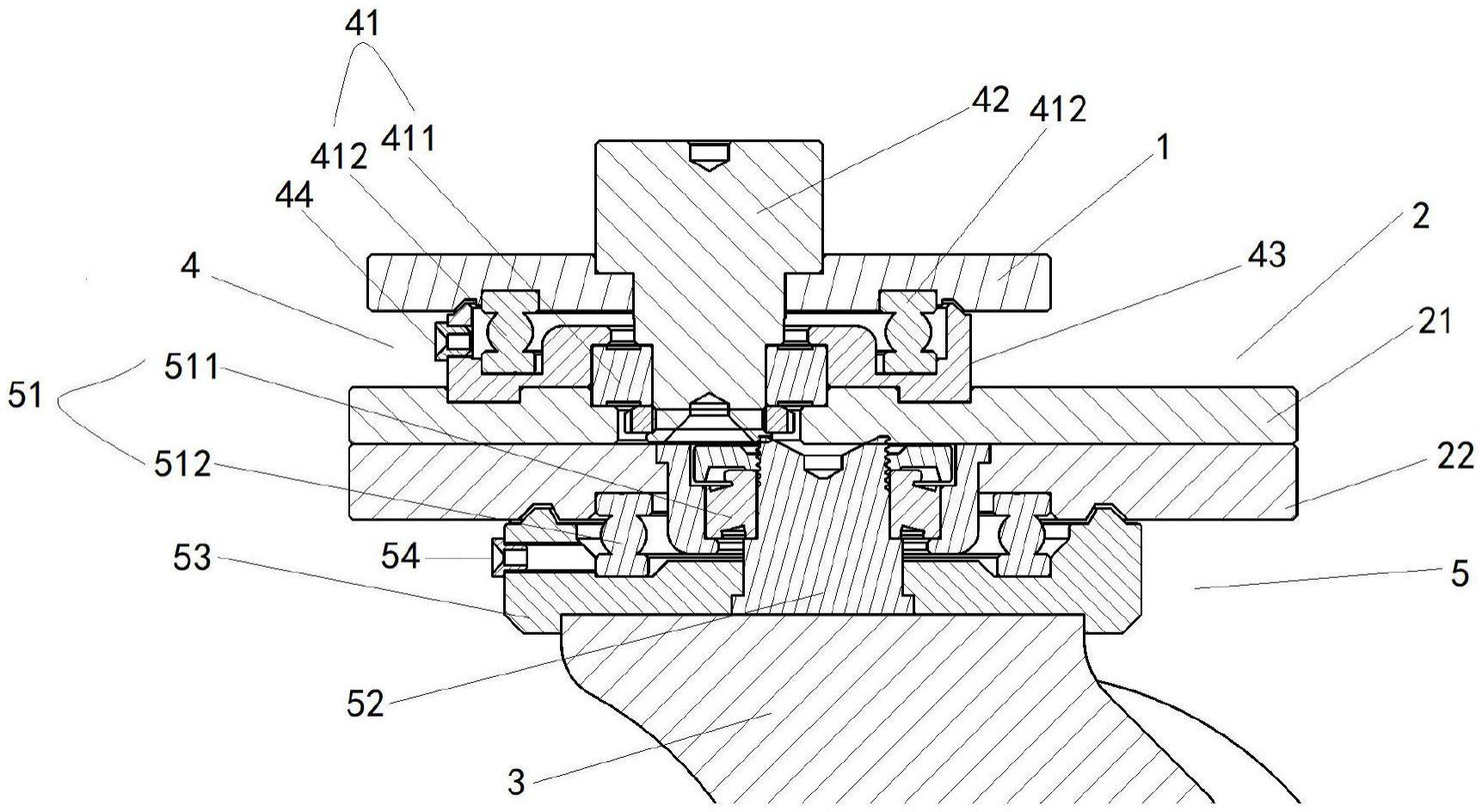
17.图1为本实用新型的结构示意图。
18.图2为图1的俯视图。
19.图3为本实用新型的侧视图。
20.图4为本实用新型的主视图。
21.其中,1为第一板、2为第二板、3为支架、4为第一转动组件、5为第二转动组价、21为第二上板,22为第二下板,41为第一轴承组件,42为第一铆钉,43为第一轴承座,411为第一锥形轴承,412为第一平面推力轴承,51为第二轴承组件,52为第二铆钉,53为第二轴承座,511为第二锥形轴承,512为第二平面推力轴承。
具体实施方式
22.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
24.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
26.本实用新型实施例是这样实现的,如图1至图4所示的一种脚轮双旋转装置,包括:第一板1;第二上板21,通过第一转动组件4与第一板1相连接;第二下板22,安装在第二上板21的底侧,第二下板22与第二上板21固定连接;支架3,通过第二转动组件5与第二下板22相连接。
27.在本实用新型实际应用中,能够在支架3上安装各种万向轮或定向轮,有效节省转动力,上可偏心,随便加装,在第一转动组件4和第二转动组件5的配合使用下,能够降低偏心距,摆点中和,解决超重型机器人的转动,旋转转向节省力量。
28.如图1所示,作为本实用新型一个优选的实施例,第一转动组件4包括:第一铆钉42,其一端贯穿第一板1并与第二上板21相连;第一轴承座43,安装在第一板1与第二上板21之间,第一轴承座43的上下两端分别设有限位槽;第一平面推力轴承412,安装在第一轴承
座43上端的限位槽中,且第一平面推力轴承412与第一板1相连;第一锥形轴承411,安装在第一轴承座43下端的限位槽中,且第一锥形轴承411与第二上板21相连。
29.在本实用新型实际应用中,通过第一铆钉42与第一平面推力轴承412和第一锥形轴承411的配合使用,能够使得万向轮能够稳定灵活的转动。在本实用新型实施例中,第一转动组件4还包括第一加油嘴44,第一加油嘴44设置在第一轴承座43上,且处于第一平面推力轴承412的外侧,通过设有第一加油嘴44能够在使用过程中补充润滑液等,从而第一平面推力轴承412的降低磨损,提高了使用寿命,转向更加顺滑稳定。
30.如图1所示,作为本实用新型一个优选的实施例,第二转动组件5包括:第二轴承座53,安装在支架3的上端,第二轴承座53与支架3固定连接;第二铆钉52,其一端贯穿第二轴承座53且与第二下板22相连;第二锥形轴承511,安装在第二铆钉52与第二下板22之间。
31.在本实用新型实施例中,第二转动组件5还包括:第二平面推力轴承512,安装在第二轴承座53与第二下板22之间;第二加油嘴54,设置在第二轴承座53上,第二加油嘴54设置在第二平面推力轴承512外侧的第二轴承座53上。
32.在本实施例的实际应用中,通过设有第二铆钉52、第二锥形轴承511和第二平面推力轴承512的配合使用,能够稳定转动,且在第一转动组件4的底端设有第二转动组件5,能够降低偏心距,另外通过设有第二加油嘴54,能够向其中补充添加润滑液从而能够降低第二平面推力轴承512的磨损,保持稳定顺滑,延长使用寿命。
33.综上:本实用新型提供一种万向轮双旋转装置,在本实用新型实际应用中,能够在支架3上安装各种万向轮,有效节省转动力,上可偏心,随便加装,在第一转动组件4和第二转动组件5的配合使用件,能够降低偏心距,摆点中和,解决超重型机器人的转动,旋转转向节省力量。
34.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。