1.本技术涉及磁力驱动技术领域,尤其涉及一种过弯定子模组及磁驱输送系统。
背景技术:
2.在以磁动力作为动力驱动的磁驱输送系统中,输送装置的过弯处通常会设置有弧形的过弯定子模组,动子通过过弯定子模组实现换向。
3.然而,相关技术中,过弯定子模组的过弯电枢绕组的形状较为单一,导致动子通过过弯电枢绕组过弯时,仅能通过控制过弯电枢绕组的输入电流大小来控制为动子提供的驱动力,从而控制动子的过弯速度,动子的过弯速度控制方式较为单一。
技术实现要素:
4.本技术提供一种过弯定子模组及磁驱输送系统,使得动子的过弯速度控制方式较为多样。
5.第一方面,本技术提供一种过弯定子模组,用于驱动动子沿所述过弯定子模组的延伸方向移动,所述过弯定子模组包括:过弯定子,包括定子本体以及过弯电枢绕组;过弯电枢绕组设置于所述定子本体,所述过弯电枢绕组包括依次连接的第一端面、第一内侧面、第二端面以及第一外侧面,所述第一内侧面包括第一弧面,所述第一外侧面包括与所述第一弧面相对设置的第二弧面;其中,所述第一弧面的弧形轮廓具有第一圆心,所述第二弧面的弧形轮廓具有第二圆心,所述第一圆心与所述第二圆心错位设置。
6.第二方面,本技术还提供一种磁驱输送系统,包括动子、直线定子模组以及过弯定子模组,所述过弯定子模组与所述直线定子模组拼接以形成一输送装置,所述输送装置用于驱动所述动子沿所述输送装置的延伸方向移动。
7.第三方面,本技术还提供一种磁驱输送系统,包括动子、直线定子模组以及过弯定子模组,所述过弯定子模组与所述直线定子模组拼接以形成一输送装置,所述输送装置用于驱动所述动子沿所述输送装置的延伸方向移动;其中,所述直线定子模组包括直线定子以及直线导轨,所述直线定子与所述过弯定子拼接,所述直线导轨与所述过弯导轨拼接。
8.本技术的有益效果为:第一弧面的弧形轮廓所在的圆与第二弧面的弧形轮廓所在的圆为非同心圆,使得第一弧面的弧形轮廓与第二弧面的弧形轮廓的形状不同,从而使得第一弧面的弧形轮廓的弯曲程度与第二弧面的弧形轮廓的弯曲程度不同,动子通过过弯定子模组过弯时,可以使动子沿第一弧面进行内圈过弯,也可以使动子沿第二弧面进行外圈过弯,由于第一弧面的弧形轮廓的弯曲程度与第二弧面的弧形轮廓的弯曲程度不同,使得过弯电枢绕组的形状更加多样,可以提高过弯定子模组的过弯电枢绕组的拼接多样性,从而可以满足输送多样性的需求;此外,使得动子沿第一弧面过弯时的速度与动子沿第二弧面过弯时的速度不同,并且还可以通过对第一弧面和第二弧面的弯曲程度的设计来控制动子沿过弯电枢绕组过弯时的过弯速度,从而使得动子的过弯速度控制方式较为多样。
附图说明
9.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1为本技术一实施例中过弯定子模组在第一视角的结构示意图;图2为本技术一实施例中过弯定子模组在第二视角的结构示意图;图3为本技术一实施例中过弯定子模组在第三视角的结构示意图;图4为本技术另一实施例中过弯定子模组在第三视角的结构示意图;图5为本技术又一实施例中过弯定子模组在第三视角的结构示意图;图6为本技术一实施例中线圈的排布示意图;图7为本技术另一实施例中线圈的排布示意图;图8为本技术一实施例中直线电枢绕组与过弯电枢绕组的拼接示意图;图9为本技术一实施例中过弯定子模组在第四视角的结构示意图;图10为本技术一实施例中动子与过弯定子模组在第三视角的结构示意图;图11为本技术一实施例中动子、直线电枢绕组以及过弯电枢绕组的结构示意图;图12为本技术一实施例中过弯定子模组在第五视角的结构示意图;图13为本技术又一实施例中过弯定子模组在第三视角的结构示意图;图14至图18为本技术一实施例中滚轮依次经过第一直线段、弧形输送段以及第二直线段的移动过程示意图;图19为本技术一实施例中磁驱输送系统的结构示意图;图20为本技术一实施例中动子的结构示意图。
11.附图标记:10、过弯定子模组;20、过弯定子;21、定子本体;211、容纳腔;212、插口;213、插接组件;214、散热风道;22、过弯电枢绕组;221、第一端面;222、第一内侧面;222a、第一弧面;222b、第一过渡面;222c、第二过渡面;223、第二端面;224、第一外侧面;224a、第二弧面;224b、第三过渡面;224c、第四过渡面;225、耦合面;226a、耦合端;226b、连接端;227a、第一突出部;227b、第二突出部;228、线圈;23、过弯导轨;231、弧形输送段;231a、弧形内侧面;231b、弧形外侧面;231b1、第一外弧面;231b2、第二外弧面;231b3、第三外弧面;232、第一直线段;233、第二直线段;30、动子;31、第一滚轮;32、第二滚轮;33、第三滚轮;34、第四滚轮;35、基座;351、容纳槽;352、槽口;36、永磁体;41、第一连线;42、第二连线;50、直线定子模组;51、直线定子;511、直线电枢绕组;512、直线导轨;o1、第一圆心;o2、第二圆心;o3、第三圆心;o4、第四圆心;o5、第五圆心;o6、第六圆心;o7、第七圆心;o8、第八圆心;r0、第一圆心与第二圆心之间的间距;r1、第一圆心与第一内侧面之间的间距;r2、第二圆心与第一外侧面之间的间距;r3、第二圆心与第一内侧面之间的间距;d、过弯电枢绕组的宽度;aa、对称轴;l1、第二直线段的内侧面与第二直线段的外侧面之间的间距;l2、弧形内侧面与第二外弧面之间的间距;α、第一端面与第二端面形成的夹角的角度;u、u相线圈;v、v相线圈;w、w相线圈。
具体实施方式
12.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
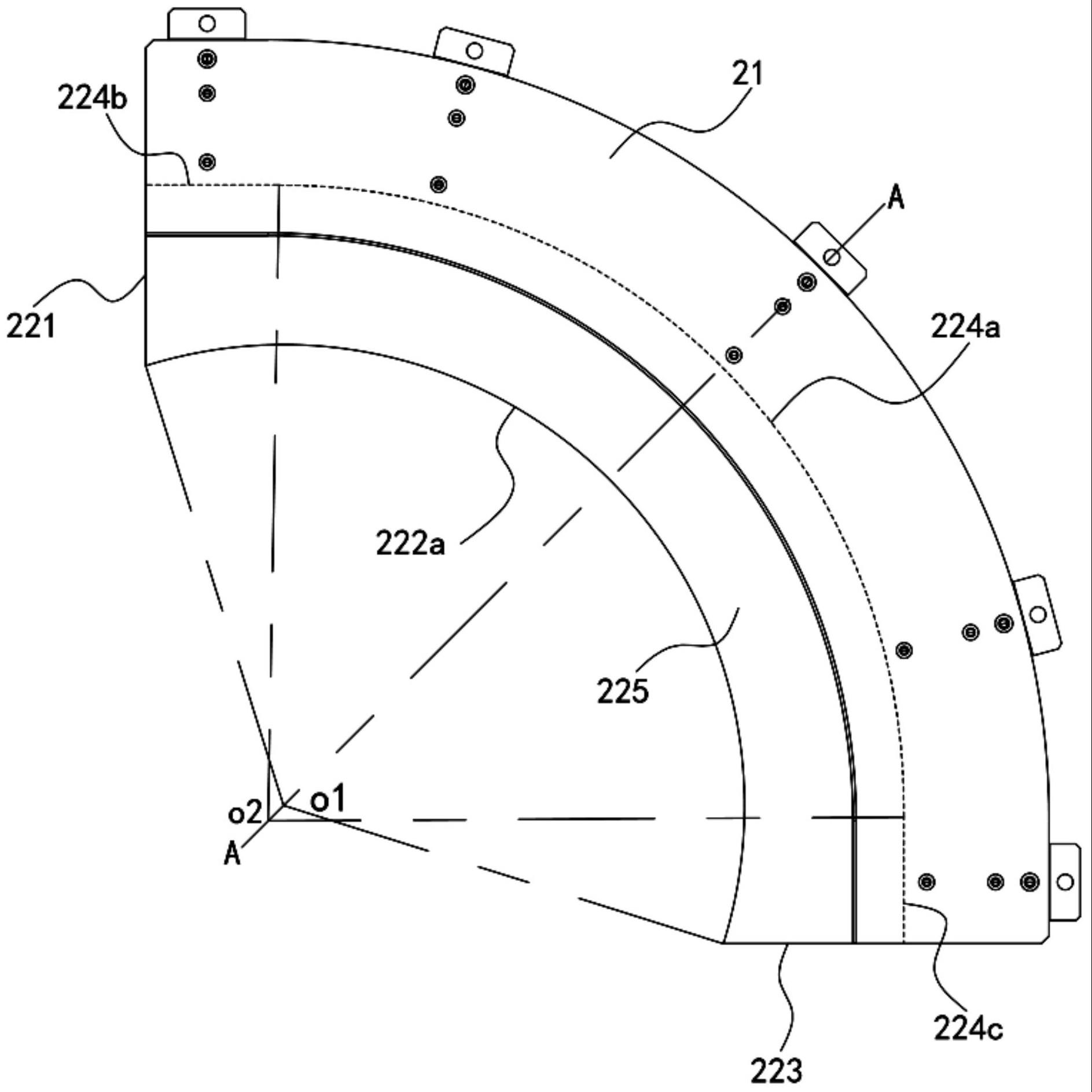
13.本技术提供一种过弯定子模组及磁驱输送系统,以解决相关技术中,动子通过过弯电枢绕组过弯时,仅能通过控制过弯电枢绕组的输入电流大小来控制为动子提供的驱动力,从而控制动子的过弯速度,动子的过弯速度控制方式较为单一的问题。
14.第一方面,本技术提供一种过弯定子模组10,如图1和图2所示,过弯定子模组10用于驱动动子30(如图20)沿过弯定子模组10的延伸方向移动,过弯定子模组10可以与磁驱输送系统中的直线定子模组50(如图11)进行拼接,并且过弯定子模组10设置于磁驱输送系统的过弯处,动子30沿磁驱输送系统移动至过弯定子模组10时,通过过弯定子模组10实现动子30在输运行程中的过弯变向。可以理解的是,动子30是磁驱输送系统中用于承载待输运物的器件,动子30为磁动力动子,工作时,动子30可以放置在过弯定子模组10上,过弯定子模组10可以为动子30提供磁动力,以驱动动子30沿过弯定子模组10的延伸方向移动。
15.具体地,如图2和图3所示,过弯定子模组10包括过弯定子20,过弯定子20包括定子本体21以及过弯电枢绕组22,过弯电枢绕组22设置于定子本体21。可以理解的是,定子本体21用于为过弯电枢绕组22提供支撑,过弯电枢绕组22具有线圈228(如图6),线圈228在通电时会产生磁场,动子30上的永磁体36(如图20)在线圈228的电流励磁下产生驱动力,推动整个动子30沿着过弯定子模组10的延伸方向移动,从而实现待输运物的输运;磁动力驱动的具体工作原理在相关技术中早有公示,本技术不做赘叙。
16.更具体地,过弯电枢绕组22包括依次连接的第一端面221、第一内侧面222、第二端面223以及第一外侧面224,第一内侧面222包括第一弧面222a,第一外侧面224包括与第一弧面222a相对设置的第二弧面224a。第一端面221和第二端面223分别为过弯电枢绕组22的两端的端面,将多个过弯电枢绕组22进行拼接时,一个过弯电枢绕组22的第一端面221与另一个过弯电枢绕组22的第一端面221或第二端面223进行拼接;将过弯电枢绕组22与直线电枢绕组511进行拼接时,第一端面221与一个直线电枢绕组511(如图19)拼接,第二端面223与另一个直线电枢绕组511拼接。
17.其中,第一弧面222a的弧形轮廓具有第一圆心o1,第二弧面224a的弧形轮廓具有第二圆心o2,第一圆心o1与第二圆心o2错位设置。如图3所示,第一弧面222a的弧形轮廓的第一圆心o1与第二弧面224a的弧形轮廓的第二圆心o2错位设置,是指在与第一弧面222a和第二弧面224a的轴心线垂直的平面上,第一弧面222a的投影的圆心与第二弧面224a的投影的圆心错位设置,即第一弧面222a的弧形轮廓所在的圆与第二弧面224a的弧形轮廓所在的圆为非同心圆,使得第一弧面222a的弧形轮廓与第二弧面224a的弧形轮廓的形状不同,从而使得第一弧面222a的弧形轮廓的延伸方向与第二弧面224a的弧形轮廓的延伸方向不相同,即第一弧面222a的弧形轮廓的弯曲程度(即曲率)与第二弧面224a的弧形轮廓的弯曲程度不同,对于本领域技术人员可知,在动子30的永磁体36的规格相同的情况下,动子30沿过弯电枢绕组22进行过弯时,动子30的过弯速度取决于过弯电枢绕组22为动子30提供的驱动力的大小,而过弯电枢绕组22为动子30提供的驱动力又与线圈228的输入电流的大小以及过弯电枢绕组22的弯曲程度相关,以动子30沿第一弧面222a进行过弯时为例,一般而言,第
一弧面222a的弯曲程度越大,动子30上的永磁体36(如图20)与过弯电枢绕组22的耦合面225(如图3)的重叠面积越小,此时永磁体36与过弯电枢绕组22的磁场耦合越少,过弯电枢绕组22为动子30提供的驱动力越小。
18.在本技术中,动子30通过过弯定子模组10过弯时,可以使动子30沿第一弧面222a进行内圈过弯(此时过弯电枢绕组22位于定子本体21的内侧,且过弯电枢绕组22的第二弧面224a与定子本体21连接),也可以使动子30沿第二弧面224a进行外圈过弯(此时过弯电枢绕组22位于定子本体21的外侧,且过弯电枢绕组22的第一弧面222a与定子本体21连接),由于第一弧面222a的弧形轮廓的弯曲程度与第二弧面224a的弧形轮廓的弯曲程度不同,使得过弯电枢绕组22的形状更加多样,可以提高过弯定子模组10的过弯电枢绕组22的拼接多样性,从而可以满足输送多样性的需求;此外,使得动子30沿第一弧面222a过弯时的速度与动子30沿第二弧面224a过弯时的速度不同,并且还可以通过对第一圆心o1和第二圆心o2的位置设置,来调整第一弧面222a和第二弧面224a的弯曲程度,从而可以控制动子30沿过弯电枢绕组22过弯时的过弯速度,从而使得动子的过弯速度控制方式较为多样。
19.如图5所示,在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还包括第一过渡面222b和第二过渡面222c,第一过渡面222b的第一端与第一端面221连接,第一过渡面222b的第二端与第一弧面222a的第一端连接,第二过渡面222c的第一端与第一弧面222a的第二端连接,第二过渡面222c的第二端与第二端面223连接。可以理解的是,将过弯电枢绕组22与直线定子模组50的直线电枢绕组511进行拼接时,第一弧面222a的两端可以通过第一过渡面222b和第二过渡面222c分别与直线电枢绕组511的内侧面连接,以使得过弯电枢绕组22与直线电枢绕组511的拼接更加方便和顺畅。第一过渡面222b与第二过渡面222c的具体长度可以根据实际需求进行选择,本技术不做具体限制。
20.如图4所示,在本技术一实施例中,过弯电枢绕组22的第一内侧面222可以仅包括第一过渡面222b,第一过渡面222b的第一端与第一端面221连接,第一过渡面222b的第二端与第一弧面222a的第一端连接,第一弧面222a的第二端与第二端面223连接。
21.在本技术另一实施例中,过弯电枢绕组22的第一内侧面222还可以仅包括第二过渡面222c,第一弧面222a的第一端与第一端面221连接,第二过渡面222c的第一端与第一弧面222a的第二端连接,第二过渡面222c的第二端与第二端面223连接。
22.如图3所示,在本技术一些实施例中,过弯电枢绕组22的第一外侧面224还包括第三过渡面224b和第四过渡面224c,第三过渡面224b的第一端与第一端面221连接,第三过渡面224b的第二端与第二弧面224a的第一端连接,第四过渡面224c的第一端与第二弧面224a的第二端连接,第四过渡面224c的第二端与第二端面223连接。可以理解的是,将过弯电枢绕组22与直线电枢绕组511进行拼接时,第二弧面224a的两端可以分别通过第三过渡面224b和第四过渡面224c与直线电枢绕组511的外侧面连接,以使得过弯电枢绕组22与直线电枢绕组511的拼接更加方便和顺畅。第三过渡面224b与第四过渡面224c的具体长度可以根据实际需求进行选择,本技术不做具体限制。
23.如图4所示,在本技术一实施例中,过弯电枢绕组22的第一外侧面224可以仅包括第三过渡面224b,第三过渡面224b的第一端与第一端面221连接,第三过渡面224b的第二端与第二弧面224a的第一端连接,第二弧面224a的第二端与第二端面223连接。
24.在本技术另一实施例中,过弯电枢绕组22的第一外侧面224还可以仅包括第四过
渡面224c,第二弧面224a的第一端与第一端面221连接,第四过渡面224c的第一端与第二弧面224a的第二端连接,第四过渡面224c的第二端与第二端面223连接。
25.如图4所示,在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还包括第一过渡面222b,第一过渡面222b的第一端与第一端面221连接,第一过渡面222b的第二端与第一弧面222a的第一端连接,第一弧面222a的第二端与第二端面223连接;过弯电枢绕组22的第一外侧面224还包括第三过渡面224b,第三过渡面224b的第一端与第一端面221连接,第三过渡面224b的第二端与第二弧面224a的第一端连接,第二弧面224a的第二端与第二端面223连接。
26.在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还包括第一过渡面222b,第一过渡面222b的第一端与第一端面221连接,第一过渡面222b的第二端与第一弧面222a的第一端连接,第一弧面222a的第二端与第二端面223连接;过弯电枢绕组22的第一外侧面224还可以仅包括第四过渡面224c,第二弧面224a的第一端与第一端面221连接,第四过渡面224c的第一端与第二弧面224a的第二端连接,第四过渡面224c的第二端与第二端面223连接。
27.在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还可以仅包括第二过渡面222c,第一弧面222a的第一端与第一端面221连接,第二过渡面222c的第一端与第一弧面222a的第二端连接,第二过渡面222c的第二端与第二端面223连接;过弯电枢绕组22的第一外侧面224还包括第三过渡面224b,第三过渡面224b的第一端与第一端面221连接,第三过渡面224b的第二端与第二弧面224a的第一端连接,第二弧面224a的第二端与第二端面223连接。
28.在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还可以仅包括第二过渡面222c,第一弧面222a的第一端与第一端面221连接,第二过渡面222c的第一端与第一弧面222a的第二端连接,第二过渡面222c的第二端与第二端面223连接;过弯电枢绕组22的第一外侧面224还可以仅包括第四过渡面224c,第二弧面224a的第一端与第一端面221连接,第四过渡面224c的第一端与第二弧面224a的第二端连接,第四过渡面224c的第二端与第二端面223连接。
29.如图5所示,在本技术一些实施例中,过弯电枢绕组22的第一内侧面222还包括第一过渡面222b和第二过渡面222c,第一过渡面222b的第一端与第一端面221连接,第一过渡面222b的第二端与第一弧面222a的第一端连接,第二过渡面222c的第一端与第一弧面222a的第二端连接,第二过渡面222c的第二端与第二端面223连接;过弯电枢绕组22的第一外侧面224还包括第三过渡面224b和第四过渡面224c,第三过渡面224b的第一端与第一端面221连接,第三过渡面224b的第二端与第二弧面224a的第一端连接,第四过渡面224c的第一端与第二弧面224a的第二端连接,第四过渡面224c的第二端与第二端面223连接。
30.继续参见图5所示,在本技术一些实施例中,第一过渡面222b为与第一端面221垂直设置的平面,第二过渡面222c为与第二端面223垂直设置的平面,第三过渡面224b为与第一端面221垂直设置的平面,第四过渡面224c为与第二端面223垂直设置的平面。需要说明的是,第一过渡面222b、第二过渡面222c、第三过渡面224b以及第四过渡面224c均沿直线延伸,与过弯电枢绕组22拼接的直线电枢绕组511的延伸方向取决于过弯电枢绕组22的延伸方向,更具体地,当具有第一过渡面222b时,与第一端面221拼接的直线电枢绕组511的延伸
方向与第一过渡面222b的延伸方向相同,当具有第二过渡面222c时,与第二端面223拼接的直线电枢绕组511的延伸方向与第二过渡面222c的延伸方向相同。
31.还需要说明的是,相比于相关技术中,动子30的换向位置通常位于直线电枢绕组511与过弯电枢绕组22的拼接处,而在本技术实施例中,由于第一过渡面222b和第二过渡面222c均与对应的直线电枢绕组511的延伸方向相同,使得动子30移动至过弯定子模组10上时,动子30在与第一过渡面222b和第二过渡面222c对应的直线段仍可延续直线输送状态,而动子30的整个过弯换向过程发生在与第一弧面222a和第二弧面224a对应的过弯段上,从而使得动子30的过弯换向过程可以在过弯定子模组10中完成,动子30在过弯换向的过程中无需通过直线电枢绕组511与过弯电枢绕组22的拼接处,动子30在整个换向过程中始终会收到过弯电枢绕组22持续的驱动力,使得动子30的换向过程更加稳定、更易于控制且运动精度更高。
32.还需要说明的是,在其他实施例中,也可以仅第一过渡面222b为与第一端面221相切的平面。在其他实施例中,还可以仅第二过渡面222c为与第二端面223相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第二过渡面222c为与第二端面223相切的平面。在其他实施例中,也可以仅第三过渡面224b为与第一端面221相切的平面。在其他实施例中,也可以仅第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第三过渡面224b为与第一端面221相切的平面,且第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第三过渡面224b为与第一端面221相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第二端面223相切的平面,且第三过渡面224b为与第一端面221相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第二端面223相切的平面,且第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第二过渡面222c为与第二端面223相切的平面,第三过渡面224b为与第一端面221相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第二过渡面222c为与第二端面223相切的平面,第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一端面221相切的平面,且第三过渡面224b为与第一端面221相切的平面,第四过渡面224c为与第二端面223相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第二端面223相切的平面,且第三过渡面224b为与第一端面221相切的平面,第四过渡面224c为与第二端面223相切的平面。
33.继续参见图5所示,在本技术一些实施例中,第一过渡面222b为与第一弧面222a相切的平面,第二过渡面222c为与第一弧面222a相切的平面,第三过渡面224b为与第二弧面224a相切的平面,第四过渡面224c为与第二弧面224a相切的平面,以使得过弯电枢绕组22的直线段与弧形段的连接处平滑过渡,从而使得动子30经过过弯电枢绕组22的直线段与弧形段的连接处时更加顺畅,使得动子30的换向过程更加稳定、更易于控制且运动精度更高。
34.还需要说明的是,在其他实施例中,也可以仅第一过渡面222b为与第一弧面222a相切的平面。在其他实施例中,还可以仅第二过渡面222c为与第一弧面222a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第二过渡
面222c为与第一弧面222a相切的平面。在其他实施例中,也可以仅第三过渡面224b为与第二弧面224a相切的平面。在其他实施例中,也可以仅第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第三过渡面224b为与第二弧面224a相切的平面,且第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第三过渡面224b为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第一弧面222a相切的平面,且第三过渡面224b为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第一弧面222a相切的平面,且第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第二过渡面222c为与第一弧面222a相切的平面,第三过渡面224b为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第二过渡面222c为与第一弧面222a相切的平面,第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第一过渡面222b为与第一弧面222a相切的平面,且第三过渡面224b为与第二弧面224a相切的平面,第四过渡面224c为与第二弧面224a相切的平面。在其他实施例中,还可以设置成第二过渡面222c为与第一弧面222a相切的平面,且第三过渡面224b为与第二弧面224a相切的平面,第四过渡面224c为与第二弧面224a相切的平面。
35.继续参见图5所示,在本技术一些实施例中,定子本体21具有对称轴aa,第一圆心o1以及第二圆心o2均位于对称轴aa的延伸路径上,第一弧面222a的弧形轮廓关于对称轴aa对称设置,第二弧面224a的弧形轮廓关于对称轴aa对称设置。可以理解的是,过弯定子20为关于对称轴aa对称的轴对称结构,第一弧面222a以及第二弧面224a均为关于对称轴aa对称的轴对称面,以使得定子本体21和过弯电枢绕组22的整体受力更加均匀,并且加工制造方便,可以降低生产成本。
36.在一实施例中,第一端面221与第二端面223关于对称轴aa对称设置,以使得过弯电枢绕组22的加工制造更加方便。
37.在一实施例中,第一过渡面222b与第二过渡面222c关于对称轴aa对称设置,以使得过弯电枢绕组22的加工制造更加方便。
38.在另一实施例中,第三过渡面224b与第四过渡面224c关于对称轴aa对称设置,以使得过弯电枢绕组22的加工制造更加方便。
39.在另一实施例中,第一过渡面222b与第二过渡面222c关于对称轴aa对称设置,且第三过渡面224b与第四过渡面224c关于对称轴aa对称设置,以使得过弯电枢绕组22的加工制造更加方便。
40.继续参见图5所示,具体地,第一圆心o1与第一内侧面222之间的间距,不等于第二圆心o2与第一内侧面222之间的间距;其中,第一圆心o1与第一内侧面222之间的间距,可以大于或小于第二圆心o2与第一内侧面222之间的间距。
41.需要说明的是,以第一圆心o1与第二圆心o2之间的间距为r0,过弯电枢绕组22的宽度为d,第一圆心o1与第一内侧面222之间的间距为r1,第二圆心o2与第一外侧面224之间的间距为r2,第二圆心o2与第一内侧面222之间的间距为r3,如图5所示,当r1小于r3时,相
对于第二圆心o2,第一圆心o1更靠近过弯电枢绕组22,此时d=r2-r1-r0,此时d较小,即过弯电枢绕组22的宽度较小,可以减小过弯电枢绕组22的体积,从而可以缩小过弯定子模组10的体积,进而可以缩小磁驱输送系统的体积;当r1大于r3时,相对于第一圆心o1,第二圆心o2更靠近过弯电枢绕组22,此时d=r2-r1 r0,此时d较大,即过弯电枢绕组22的宽度较大,使得过弯电枢绕组22的线圈228具有较大的设置面积,可以增加过弯电枢绕组22与动子30上的永磁体36的耦合面积,进而可以提高给动子30的驱动力,使得动子30在过弯时具有更快的运动速度。
42.继续参见图5所示,在本技术一些实施例中,过弯电枢绕组22具有用于与动子30的永磁体36相对设置的耦合面225(如图1),耦合面225位于第一内侧面222与第一外侧面224之间。
43.其中,耦合面225可以水平设置,即耦合面225与水平面平行。需要说明的是,相比于相关技术中将耦合面225垂直设置,使得动子30在过弯时,只能在过弯电枢绕组22的外圈过弯,导致过弯定子模组10的输送多样性较小,在本技术实施中,通过将过弯电枢绕组22的耦合面225水平设置,使得动子30在过弯时,可以在过弯电枢绕组22沿第一弧面222a进行外圈过弯,也可以在过弯电枢绕组22沿第二弧面224a进行外圈过弯,可以提升过弯定子模组10的输送多样性。当然,在其他实施例中,也可以将耦合面225竖向设置。
44.继续参见图5所示,在本技术一些实施例中,过弯电枢绕组22具有用于与动子30的永磁体36耦合的耦合端226a(如图1)以及用于与定子本体21连接的连接端226b(如图1),耦合端226a具有第一内侧面222,连接端226b具有第一外侧面224。可以理解的是,过弯电枢绕组22的连接端226b与定子本体21连接,通过过弯电枢绕组22驱动动子30时,耦合端226a插入动子30上容纳有永磁体36的容纳槽351中(如图20),并与永磁体36耦合,使得动子30可以沿着耦合端226a实现内圈过弯,可以提升过弯定子模组10的输送多样性。
45.继续参见图5所示,第一端面221与第二端面223形成的夹角的角度为α。
46.在本技术一实施例中,0度<α≤90度,使得过弯电枢绕组22的弧形轮廓的弧度较小,从而使得过弯电枢绕组22的延伸长度较小,从而使得定子在过弯定子20上的移动路程较短,缩短过弯时间。其中,α可以为22.5度、30度、45度、60度、67.5度、90度或其他度数。
47.在本技术另一实施例中,90度<α≤180度,可使得过弯电枢绕组22的弧形轮廓的弧度较大,从而使得过弯电枢绕组22的延伸长度较大,从而使得定子在过弯定子20上的移动路程更长,过弯过程更加平稳。其中,α可以为112.5度、120度、135度、150度、157.5度、180度或其他度数。
48.如图6所示,在本技术一实施例中,过弯电枢绕组22包括多个线圈绕组,多个线圈绕组沿定子本体21的延伸方向排布,且每一线圈绕组均包括沿定子本体21的延伸方向依次排布的u相线圈、v相线圈以及w相线圈。可以理解的是,每一线圈绕组中的u相线圈、v相线圈以及w相线圈同层设置,u相线圈、v相线圈以及w相线圈为线圈绕组中不同类型的线圈228,u相线圈、v相线圈以及w相线圈可以组成三相的线圈绕组,对多个三相的线圈绕组周期性通电,以使得过弯电枢绕组22在不同位置产生变化的磁场,此磁场用于与动子上的永磁体36耦合,进而驱动动子30在过弯定子模组10上运动。
49.如图7所示,在本技术另一实施例中,过弯电枢绕组22包括多个线圈绕组,多个线圈绕组中的第一线圈绕组与第二线圈绕组相邻设置,第一线圈绕组包括第一u相线圈、第一
v相线圈以及第一w相线圈,第二线圈绕组包括第二u相线圈、第二v相线圈以及第二w相线圈。
50.其中,第一u相线圈与第一w相线圈以及第二v相线圈位于同一层且依次排布,第一v相线圈与第二u相线圈以及第二w相线圈位于同一层且依次排布。需要说明的是,第一线圈绕组与第二线圈绕组位于不同层,第一线圈绕组可以位于第二线圈绕组的上一层或下一层。
51.如图8所示,在本技术一些实施例中,过弯电枢绕组22还具有第一突出部227a,第一突出部227a在定子本体21的延伸方向上突出设置于第一端面221;过弯电枢绕组22还具有第二突出部227b,第二突出部227b在定子本体21的延伸方向上突出设置于第二端面223。可以理解的是,第一突出部227a和第二突出部227b与过弯电枢绕组22形成阶梯状的结构,将两个过弯电枢绕组22进行拼接时,或将过弯电枢绕组22与带有第一突出部227a或/和第二突出部227b的直线电枢绕组511进行拼接时,第一突出部227a和第二突出部227b可以起到拼接定位的作用,由此增加两个过弯电枢绕组22或过弯电枢绕组22与直线电枢绕组511的拼接精度,进而增加动子30在接缝处的运动精度。
52.在其他实施例中,过弯电枢绕组22可以仅具有第一突出部227a,而不具有第二突出部227b;在其他实施例中,过弯电枢绕组22也可以仅具有第二突出部227b,而不具有第一突出部227a。
53.如图9所示,在本技术一些实施例中,过弯定子20还包括与过弯电枢绕组22电连接的电路板,定子本体21具有容纳腔211以及插口212,容纳腔211用于放置电路板,电路板的接口从插口212引出。需要说明的是,电路板用于控制线圈228的运行,电路板可以为单面板、双面板或多层板,电路板可以为印刷电路板,线圈绕组中的线圈228可以通过印刷的方式形成于电路板上;电路板上的线圈228可以通过电路板上的接口与其他电子器件电连接,通过将电路板通纳在容纳腔211中,可以防止电路板与其他器件发生碰撞和剐蹭,同时可以缩小过弯定子20的整体体积。
54.进一步地,插口212设置有插接组件213,插接组件213用于供线缆插接,以将线缆与电路板电连接。线缆可以为多芯航空插头,以方便线缆与插接组件213插接;线缆也可以设置有多根,且多根线缆相互独立,多根独立的线缆更加灵活,且易于维护更换。
55.继续参见图9所示,在本技术一实施例中,过弯定子模组10还包括散热风机,容纳腔211的部分形成散热风道214,散热风机的出风口与散热风道214连通,散热风机可以在散热风道214中产生气流,以对过弯定子20进行散热;此外,通过将容纳腔211的部分复用成散热风道214,无需在定子本体21上设置额外的散热风道214,可以减小过弯定子20的制造成本。
56.在本技术另一实施例中,过弯定子模组10还包括散热风机,定子本体21还具有与容纳腔211相互隔离的散热风道214,散热风机的出风口与散热风道214连通,以防止散热风道214中的热气流流动至容纳腔211中影响电路板的散热。
57.在本技术一实施例中,插口212位于定子本体21背离过弯电枢绕组22的一侧,以防止过弯电枢绕组22堵住插口212。
58.在本技术另一实施例中,插口212位于定子本体21沿定子本体21的厚度方向的一侧,以防止过弯电枢绕组22堵住插口212。
59.如图10至图12所示,在本技术一些实施例中,过弯定子模组10还包括过弯导轨23,过弯导轨23设置于过弯电枢绕组22的侧方且与定子本体21连接,过弯导轨23的延伸方向与过弯电枢绕组22的延伸方向相同,过弯导轨23用于供动子30的滚轮滚动。可以理解的是,过弯导轨23用于为动子30提供限位导向,动子30的滚轮可以沿着过弯导轨23轨道,使得动子30在过弯电枢绕组22的驱动下沿着过弯定子模组10稳定的移动。
60.在本技术一实施例中,耦合面225及过弯导轨23水平设置,且过弯导轨23位于过弯电枢绕组22的下方;或者,耦合面225及过弯导轨23水平设置,过弯导轨23位于定子本体21的上方或下方;或者,耦合面225及过弯导轨23垂直设置,过弯导轨23位于连接端226b。
61.具体地,如图5所示,过弯导轨23包括弧形输送段231,过弯电枢绕组22上与第一弧面222a以及第二弧面224a对应的部分与弧形输送段231位置相对,弧形输送段231具有弧形内侧面231a以及弧形外侧面231b。
62.在本技术一实施例中,弧形内侧面231a的弧形轮廓具有第三圆心o3,弧形外侧面231b的弧形轮廓具有第四圆心o4,第三圆心o3以及第四圆心o4均与第二圆心o2重叠设置。可以理解的是,在本实施例中,弧形输送段231的各处的弧度相同,弧形内侧面231a的弧形轮廓为一个圆的部分,弧形外侧面231b的弧形轮廓为另一个圆的部分,且弧形内侧面231a的弧形轮廓所在的圆与弧形外侧面231b的弧形轮廓所在的圆,以及第二弧面224a的弧形轮廓所在的圆为同心圆,使得弧形外侧面231b与弧形内侧面231a之间的各处间距均相同,即弧形输送段231的各处的宽度均相同,使得滚轮沿弧形输送段231进行过弯变向时更加顺畅。
63.如图13所示,在本技术另一实施例中,弧形内侧面231a的弧形轮廓具有第五圆心o5,弧形外侧面231b包括沿过弯导轨23的延伸方向依次排布且依次连接第一外弧面231b1、第二外弧面231b2以及第三外弧面231b3,第一外弧面231b1的弧形轮廓具有第六圆心o6,第二外弧面231b2的弧形轮廓具有第七圆心o7,第三外弧面231b3的弧形轮廓具有第八圆心o8,第五圆心o5以及第七圆心o7均与第二圆心o2重叠设置,第五圆心o5、第六圆心o6、第七圆心o7以及第八圆心o8均与第一圆心o1错位设置,且第六圆心o6以及第八圆心o8均与第七圆心o7错位设置。可以理解的是,在本实施例中,第一外弧面231b1的弧形轮廓所在的圆、第二外弧面231b2的弧形轮廓所在的圆,以及第三外弧面231b3的弧形轮廓所在的圆均为非同心圆,这使得第一外弧面231b1与弧形内侧面231a之间的间距以及第三外弧面231b3与弧形内侧面231a之间的间距,与第二外弧面231b2与弧形内侧面231a之间的间距均不相同。
64.在一实施例中,第一外弧面231b1与第二外弧面231b2相切,且第三外弧面231b3与第二外弧面231b2相切,使得滚轮沿着第一外弧面231b1、第二外弧面231b2以及第三外弧面231b3进行过弯变向时更加顺畅。
65.还需要说明的是,在其他实施例中,可以仅第一外弧面231b1与第二外弧面231b2相切,也可以仅第三外弧面231b3与第二外弧面231b2相切。
66.具体地,继续参见图13所示,过弯导轨23还包括第一直线段232以及第二直线段233,第一直线段232、弧形输送段231以及第二直线段233沿过弯导轨23的延伸方向依次排布且依次连接,第一直线段232以及第二直线段233用于分别与直线定子模组50的直线导轨512(如图14)拼接。
67.在本技术一些实施例中,第一直线段232的内侧面为与弧形内侧面231a相切的平
面,第二直线段233的内侧面为与弧形内侧面231a相切的平面,第一直线段232的外侧面为与第一外弧面231b1相切的平面,且第二直线段233的外侧面为与第三外弧面231b3相切的平面。
68.可以理解的是,第一直线段232和第二直线段233均沿直线延伸,与过弯导轨23拼接的直线导轨512的延伸方向取决于过弯导轨23的延伸方向,更具体地,当具有第一直线段232时,与第一直线段232拼接的直线导轨512的延伸方向与第一直线段232的延伸方向相同,当具有第二直线段233时,与第一直线段232拼接的直线导轨512的延伸方向与第一直线段232的延伸方向相同,滚轮在第一直线段232和第二直线段233仍可延续直线输送状态,使得动子30在第一直线段232和第二直线段233仍可延续直线输送状态,而动子30的整个过弯换向过程发生在弧形输送段231,从而使得动子30的过弯换向过程可以在过弯定子模组10中完成,动子30在过弯换向的过程中无需通过过弯导轨23与直线导轨512的拼接处,使得动子30的换向过程更加稳定、更易于控制且运动精度更高。
69.更具体地,过弯电枢绕组22上与第一过渡面222b以及第三过渡面224b对应的部分与第一直线段232位置相对,过弯电枢绕组22上与第二过渡面222c以及第四过渡面224c对应的部分与第二直线段233位置相对。
70.还需要说明的是,在其他实施例中,也可以仅第一直线段232的内侧面为与弧形内侧面231a相切的平面。在其他实施例中,还可以仅第二直线段233的内侧面为与弧形内侧面231a相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第二直线段233的内侧面为与弧形内侧面231a相切的平面。在其他实施例中,也可以仅第一直线段232的外侧面为与第一外弧面231b1相切的平面。在其他实施例中,也可以仅第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第一直线段232的外侧面为与第一外弧面231b1相切的平面,且第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第一直线段232的外侧面为与第一外弧面231b1相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第一直线段232的外侧面为与第一外弧面231b1相切的平面,且第二直线段233的内侧面为与弧形内侧面231a相切的平面。在其他实施例中,还可以设置成第二直线段233的内侧面为与弧形内侧面231a相切的平面,且第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第二直线段233的内侧面为与弧形内侧面231a相切的平面,第一直线段232的外侧面为与第一外弧面231b1相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第二直线段233的内侧面为与弧形内侧面231a相切的平面,第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第一直线段232的内侧面为与弧形内侧面231a相切的平面,且第一直线段232的外侧面为与第一外弧面231b1相切的平面,第二直线段233的外侧面为与第三外弧面231b3相切的平面。在其他实施例中,还可以设置成第二直线段233的内侧面为与弧形内侧面231a相切的平面,且第一直线段232的外侧面为与第一外弧面231b1相切的平面,第二直线段233的外侧面为与第三外弧面231b3相切的平面。
71.如图12和图14所示,在本技术一些实施例中,动子30包括第一滚轮31、第二滚轮32、第三滚轮33以及第四滚轮34,第一滚轮31与第二滚轮32用于设置于过弯导轨23的外侧,且沿过弯导轨23的延伸方向间隔排布;第三滚轮33与第四滚轮34用于设置于过弯导轨23的内侧,且沿过弯导轨23的延伸方向间隔排布。
72.其中,第一滚轮31与第二滚轮32之间的间距,小于第三滚轮33与第四滚轮34之间的间距。可以理解的是,第三滚轮33和第四滚轮34用于沿过弯导轨23的弧形内侧面231a滚动,由于弧形内侧面231a的弧形轮廓的各处的弧度均相同,使得第三滚轮33和第四滚轮34可以始终保持与弧形内侧面231a接触,第一滚轮31和第二滚轮32用于沿过弯导轨23的弧形外侧面231b滚动,通过将第一滚轮31与第二滚轮32之间的间距设置的较小,可以在第一滚轮31和第二滚轮32在第一外弧面231b1、第二外弧面231b2和第三外弧面231b3滚动时,尽量保证第一滚轮31和第二滚轮32中的至少一者与弧形外侧面231b接触,从而使得最少三个滚轮与过弯导轨23接触,以形成三角形的稳定结构,并且由于第三滚轮33和第四滚轮34之间的间距较大,使得三个滚轮可以形成稳定性更强的锐角三角形,使得动子30沿过弯导轨23移动时更加稳定和顺畅。
73.还需要说明的是,在本技术其他实施例中,滚轮的数量也可以为1个、2个、3个、5个或其他数量,所有滚轮也可以均位于过弯导轨23的内侧或外侧;当过弯导轨23的内侧和外侧均设置滚轮时,位于过弯导轨23的内侧的滚轮的数量可以与位于过弯导轨23的外侧的滚轮的数量相同或不同,例如,位于过弯导轨23的内侧的滚轮的数量为2,位于过弯导轨23的外侧的滚轮的数量为1。
74.如图14至图18所示,图14至图18为滚轮依次经过第一直线段232、弧形输送段231以及第二直线段233的移动过程。
75.如图14所示,在本技术一实施例中,第一直线段232的内侧面与弧形内侧面231a具有第一切点,当第一切点与第四滚轮34的轴心线位于同一平面时,第三滚轮33与过弯导轨23的接触位置为第一直线段232与直线导轨512的连接处,以使得动子30沿第一直线段232移动时,保证第三滚轮33和第四滚轮34中的一者与第一直线段232的内侧面接触,提升动子30沿第一直线段232移动时的稳定性。
76.如图16所示,当第一滚轮31以及第二滚轮32均与第二外弧面231b2接触时,第一滚轮31以及第二滚轮32的外轮廓均与第二外弧面231b2相切,第三滚轮33以及第四滚轮34的外轮廓均与弧形内侧面231a相切,以使得动子30沿过弯导轨23上与第二外弧面231b2对应的部分移动时,保证4个滚轮且可以与过弯导轨23上与第二外弧面231b2对应的部分接触,以提升动子30过弯时的稳定性。
77.如图18所示,在本技术一实施例中,第二直线段233的内侧面与弧形内侧面231a具有第二切点,当第二切点与第三滚轮33的轴心线位于同一平面时,第四滚轮34与过弯导轨23的接触位置为第二直线段233与直线导轨512的连接处,以使得动子30沿第二直线段233移动时,保证第三滚轮33和第四滚轮34中的一者与第二直线段233的内侧面接触,提升动子30沿第二直线段233移动时的稳定性。
78.在本技术一实施例中,如图14所示,第一连线41经过第三滚轮33的轴心线与第四滚轮34的轴心线,第二连线42为与第一连线41形成的夹角为40度,第二连线42与第二滚轮32的外轮廓相切。
79.在本技术一实施例中,第一滚轮31和第二滚轮32之间的间距可以为40毫米~60毫米,第一滚轮31和第二滚轮32之间的间距可以优选为55毫米;当然,第一滚轮31和第二滚轮32之间的间距也可以为其他数值,如40毫米、45毫米、50毫米或60毫米等。第三滚轮33和第四滚轮34之间的间距可以为60.1毫米~70毫米,第三滚轮33和第四滚轮34之间的间距可以优选为64.24毫米,当然,第三滚轮33和第四滚轮34之间的间距也可以为其他数值,如60.1毫米、62毫米、65毫米、68毫米或70毫米等。第一滚轮31、第二滚轮32、第三滚轮33以及第四滚轮34的半径可以相同或不同,第一滚轮31、第二滚轮32、第三滚轮33以及第四滚轮34的半径可以为30毫米-40毫米,第一滚轮31、第二滚轮32、第三滚轮33以及第四滚轮34的半径可以优选为34毫米;当然,第一滚轮31、第二滚轮32、第三滚轮33以及第四滚轮34的半径也可以为其他数值,如30毫米、32毫米、35毫米、38毫米或40毫米。
80.如图16所示,第一直线段232的内侧面与第一直线段232的外侧面之间的间距,以及第二直线段233的内侧面与第二直线段233的外侧面之间的间距均为l1,即第一直线段232的宽度以及第二直线段233的宽度均为l1;弧形内侧面231a与第二外弧面231b2之间的间距为l2,即过弯导轨23上与第二外弧面231b2对应的部分为过弯段的宽度为l2。
81.在一实施例中,l1>l2,可以理解的是,第一滚轮31与第三滚轮33之间的间距,以及第二滚轮32与第四滚轮34之间的间距通常取决于直线导轨512的宽度,使得动子30在沿直线导轨512移动时,4个滚轮均与直线导轨512接触,而与第一直线段232拼接的直线导轨512的宽度会与第一直线段232的宽度相同,与第二直线段233拼接的直线导轨512的宽度会与第二直线段233的宽度相同,因此,以动子30沿第一直线段232移动时为例,4个滚轮也会均与第一直线段232接触,在本实施例中,通过设置成l1>l2,可以防止在动子30移动至过弯导轨23上与第二外弧面231b2对应的部分时由于l2过大导致滚轮卡死,从而保证动子30的运动顺畅;此外,由于l1与l2不相等,会导致第一直线段232的外侧面和第二直线段233的外侧面无法与第二外弧面231b2直接相切,通过设置第一外弧面231b1来实现第一直线段232的外侧面与第二外弧面231b2之间的过渡,并且设置第三外弧面231b3来实现第二直线段233的外侧面与第二外弧面231b2之间的过渡,可以使动子30运动的更加顺畅。
82.在另一实施例中,l1=l2,以使得动子30移动至过弯导轨23上与第二外弧面231b2对应的部分时,4个滚轮可以均与过弯导轨23上与第二外弧面231b2对应的部分接触,可以使动子30运动的更加稳定。
83.第二方面,本技术还提供一种磁驱输送系统,如图19所示,磁驱输送系统包括动子30、直线定子模组50以及如上述任一实施例中的过弯定子模组10,过弯定子模组10与直线定子模组50拼接以形成一输送装置,输送装置用于驱动动子30沿输送装置的延伸方向移动。
84.在一实施例中,直线定子模组50包括直线定子51以及直线导轨512,直线定子51与过弯定子20拼接,直线导轨512与过弯导轨23拼接。
85.具体地,直线定子51包括直线电枢绕组511,直线电枢绕组511用于与过弯电枢绕组22连接。
86.如图20所示,动子30包括基座35以及永磁体36;滚轮安装于基座35,基座35具有容纳槽351,容纳槽351具有供直线电枢绕组511以及过弯电枢绕组22出入容纳槽351的槽口352,永磁体36设置于容纳槽351的槽壁上,以过弯电枢绕组22为例,当过弯电枢绕组22的耦
合端226a通过槽口352插入容纳槽351时,过弯电枢绕组22的耦合面225与永磁体36相对设置。
87.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
88.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。