1.本发明涉及一种旋转耦合双关节推挽式柔性绳索驱动方法,用于实现耦合绳驱动双关节高精度力/位混合控制运动,属于智能控制领域,适用于绳驱灵巧手手指运动控制,或者其他绳驱智能机构的运动控制。
背景技术:
2.针对复杂灵巧精细作业任务需求,灵巧手需要高精度控制手指末端位置与姿态,从而实现多指手与物体之间的接触位置规划和抓取姿态规划,确保手指末端在抓取操作的最佳位置和姿态,保证灵巧手的构型具有最佳抓取平面。绳驱双关节灵巧手手指,存在关节耦合和绳子存在死区、不能反向驱动且必须拉紧的问题,数学模型解析解的方法计算量大,且容易出现无解的情况,使手指控制达不到低延时高精度的要求。
技术实现要素:
3.本发明的技术解决问题是:为实现灵巧手高精度控制手指末端位置与姿态,从而实现手指与物体之间的接触位置规划和抓取姿态规划,提出一种旋转耦合双关节推挽式柔性绳索驱动方法,该方法适用于绳驱灵巧手手指运动控制,或者其他绳驱智能机构的运动控制,解决绳子必须拉紧不能反向驱动的问题,从而实现手指末端的低延时高精度运动控制,为灵巧手实现多手指协同操作运动控制奠定基础。
4.本发明的技术解决方案为:
5.一种旋转耦合双关节推挽式柔性绳索驱动方法,包括:
6.利用仿真或者实验手段获得双关节的干扰力矩与最小驱动力矩;
7.根据干扰力矩和最小驱动力矩设计四个逻辑控制器,从而建立耦合双关节推挽式绳驱控制模型;
8.获得最终手指末端位置与姿态信息。
9.优选的,利用仿真手段获得双关节的干扰力矩与最小驱动力矩时,需要按照如下方法建立基于绳驱的耦合旋转双关节动力学模型:
10.用机械画图软件绘制绳驱双旋转关节手指机构图,定义离手掌近的关节为第一关节,离手掌远的关节为第二关节,之后将机构图转存为.x_t文件,将.x_t文件导入adams仿真软件中,添加部件、连接、电机、绳系统,建立基于绳驱的耦合旋转双关节动力学模型。
11.优选的,利用实验手段获得双关节的干扰力矩和最小驱动力矩时,需要机械加工手指各结构部件零件,并在关节处安装力矩传感器,电机端安装位置传感器。
12.优选的,获得双关节的干扰力矩方法为:
13.将控制第一关节拉伸弯曲的电机命名为第一电机,控制第一关节拉伸变直的电机命名为第二电机,控制第二关节拉伸弯曲的电机命名为第三电机,控制第二关节拉伸变直的电机命名为第四电机,双关节的干扰力矩定义为τ
max
;
14.手指初始状态为伸直状态,首先将第一电机、第二电机和第四电机设置为自由跟
随模式,第三电机设置为位置驱动模式,第三电机的位置驱动输入由0逐步增加,至第二关节弯曲至极限位置,根据第一关节所负载的力矩大小记录其负载的力矩最大值τ
curve
;然后保持手指弯曲状态,将第一电机、第二电机和第三电机设置为自由跟随模式,设置第四电机为位置驱动模式,第四电机位置驱动输入由当前状态逐步增加,至第二关节恢复手指伸直状态,根据第一关节所负载的力矩大小记录其负载的力矩最大值τ
straight
;双关节的干扰力矩为τ
max
=max(τ
curve
,τ
straight
)。
15.优选的,获得双关节的最小驱动力矩τ
min
方法为:
16.手指初始状态为伸直状态,首先将第一电机、第二电机和第四电机设置为自由跟随模式,设置第三电机为力矩驱动模式,第三电机驱动力矩由0逐步增加,至第二关节开始运动,记录此时驱动力矩为τ
min1
;然后保持手指弯曲状态,将第一电机、第二电机和第三电机设置为自由跟随模式,设置第四电机为力矩驱动模式,第四电机力矩驱动输入由0逐步增加至第二关节开始运动,记录此时驱动力矩为τ
min2
;
17.关节最小驱动力矩τ
min
=max(τ
min1
,τ
min2
)。
18.优选的,设四个逻辑控制器为第一逻辑控制器、第二逻辑控制器、第三逻辑控制器、第四逻辑控制器;
19.第一逻辑控制器逻辑定义如下:
20.当输入为正时,输出为输入数值与双关节的干扰力矩的和,当输入为负数时,输出为双关节的干扰力矩;
21.第二逻辑控制器逻辑定义如下:
22.当输入为正时,输出为输入数值与双关节的干扰力矩的和,当输入为负数时,输出为双关节的干扰力矩;
23.第三逻辑控制器逻辑定义如下:
24.当输入为正时,输出为输入数值与双关节的最小驱动力矩的和,当输入为负数时,输出为双关节的最小驱动力矩;
25.第四逻辑控制器逻辑定义如下:
26.当输入为正时,输出为输入数值与双关节的最小驱动力矩的和,当输入为负数时,输出为双关节的最小驱动力矩。
27.优选的,将四个逻辑控制器加入到传统双关节三环控制模型中,得到双关节推挽式绳驱控制模型。
28.优选的,将第一逻辑控制器加在第一电机的电流控制环输出端和第一电机之间;第二逻辑控制器加在第二电机的电流控制环输出端和第二电机之间;第三逻辑控制器加在第三电机的电流控制环输出端和第三电机之间;第四逻辑控制器加在第四电机的电流控制环输出端和第四电机之间;
29.其中,第一电机用于控制第一关节拉伸弯曲,第二电机用于控制第一关节拉伸变直,第三电机用于控制第二关节拉伸弯曲,第四电机用于控制第二关节拉伸变直。
30.一种旋转耦合双关节推挽式柔性绳索驱动设备,所述驱动设备用于实现上述旋转耦合双关节推挽式柔性绳索驱动方法。
31.本发明与现有技术相比的优点在于:
32.(1)本发明计算量小,充分利用仿真或者实验平台测量计算干扰力矩和最小驱动
力矩,解决双关节耦合的问题。
33.(2)本发明设计四个逻辑控制器,通过第一逻辑控制器和第二逻辑控制器避免了第二关节运动过程施加在第一关节上的力矩干扰,四个逻辑控制器共同作用,解决绳子不可收缩不能反向驱动的问题。
附图说明
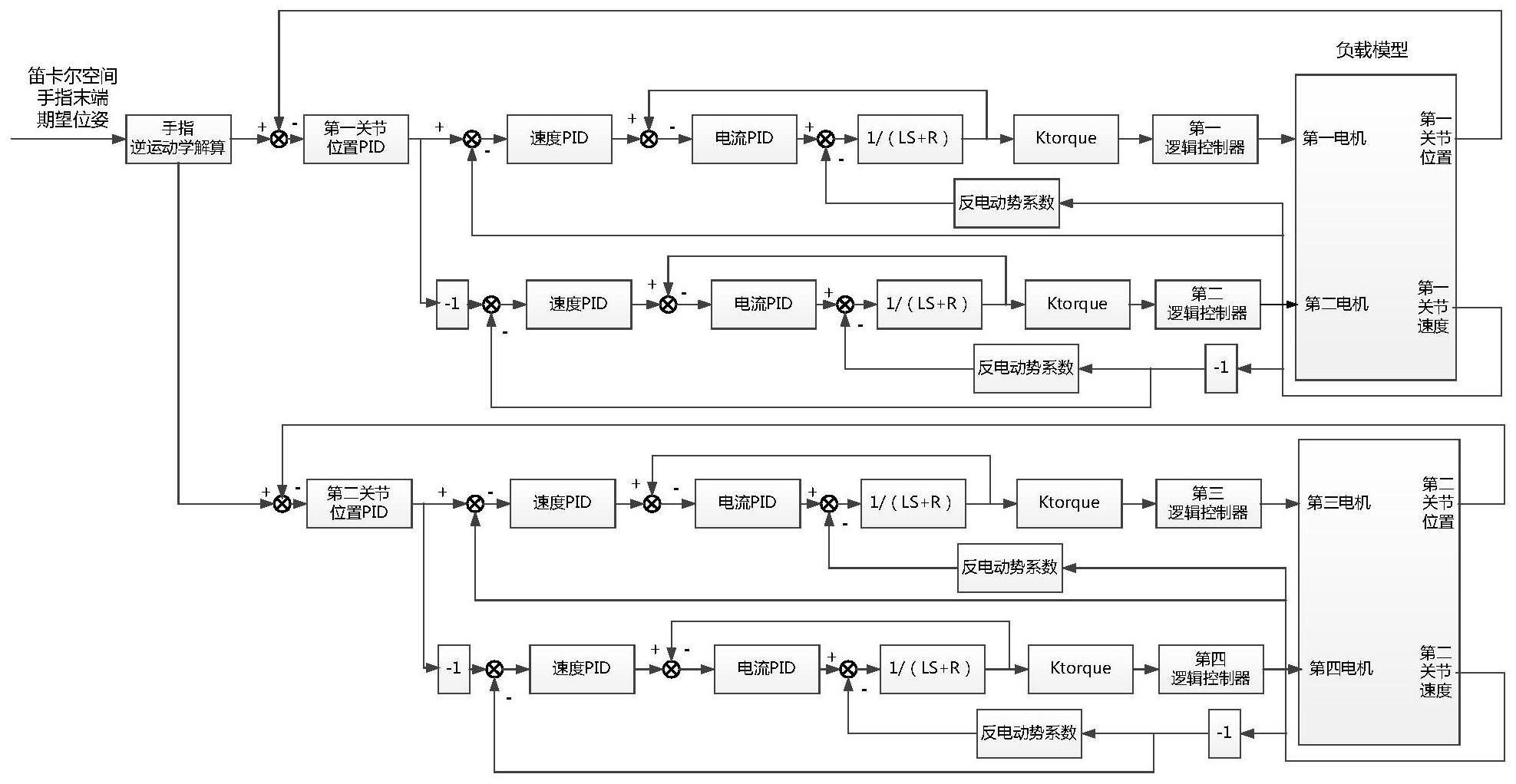
34.图1为本发明涉及双关节推挽式绳驱控制框图;
35.图2为本发明涉及第一关节驱动示意图;
36.图3为本发明涉及第二关节驱动示意图。
具体实施方式
37.本发明提出一种旋转耦合双关节推挽式柔性绳索驱动方法,首先利用仿真或者实验手段获得双关节的干扰力矩与最小驱动力矩,然后根据干扰力矩和最小驱动力矩建立耦合双关节推挽式绳驱控制模型,由干扰力矩控制解决双关节耦合问题,由最小驱动力矩和四个逻辑控制器解决绳子必须拉紧不能反向驱动的问题,实现手指末端的高精度运动控制。
38.本发明手指关节驱动方式示意图如图2、3所示,具体实施步骤如下:
39.(1)利用仿真或者实验手段获得双关节的干扰力矩与最小驱动力矩:
40.仿真手段如下:
41.首先用机械化图软件绘制绳驱双旋转关节手指机构图,定义离手掌近的关节为第一关节,离手掌远的关节为第二关节,之后将机构图转存为.x_t文件,然后将.x_t导入adams仿真软件中,添加部件、连接、电机、绳系统等,建立基于柔性绳驱的耦合旋转双关节动力学模型。控制第一关节拉伸弯曲的电机命名为第一电机,控制第一关节拉伸变直的电机命名为第二电机,控制第二关节拉伸弯曲的电机命名为第三电机,控制第二关节拉伸变直的电机命名为第四电机。双关节的干扰力矩为τ
max
,测试方法为:手指初始状态为伸直状态,首先将第一电机、第二电机和第四电机设置为自由跟随模式,设置第三电机位置驱动模式,位置驱动输入由0逐步增加,至第二关节弯曲至极限位置,记录关节1所负载的力矩大小,记录其负载的力矩最大值记为τ
curve
;然后保持手指弯曲状态,将第一电机、第二电机和第三电机设置为自由跟随模式,设置第四电机位置驱动模式,位置驱动输入由当前状态逐步增加,至第二关节恢复手指伸直状态,记录关节1所负载的力矩大小,记录其负载的力矩最大值记为τ
straight
。双关节的干扰力矩为τ
max
=max(τ
curve
,τ
straight
)。关节驱动最小驱动力矩为需要克服的摩擦力导致的力矩,记为τ
min
,测试方法为:手指初始状态为伸直状态,首先将第一电机、第二电机和第四电机设置为自由跟随模式,设置第三电机力矩驱动模式,驱动力矩由0逐步增加,至手指关节2开始运动,记录此时驱动力矩为τ
min1
;然后保持手指弯曲状态,将第一电机、第二电机和第三电机设置为自由跟随模式,设置第四电机力矩驱动模式,力矩驱动输入由0逐步增加至关节2开始运动,记录此时驱动力矩为τ
min2
。关节驱动最小驱动力矩τ
min
=max(τ
min1
,τ
min2
)。
42.实验手段时,需要机械加工手指各结构部件零件,并在关节处安装力矩传感器,进行实验测试,测试过程同仿真流程。
43.(2)根据干扰力矩和最小驱动力矩设计四个逻辑控制器,从而建立双关节推挽式绳驱控制模型,双关节推挽式绳驱控制模型如图1所示。
44.设四个逻辑控制器为第一逻辑控制器、第二逻辑控制器、第三逻辑控制器、第四逻辑控制器。
45.第一逻辑控制器:当输入为正时,输出为输入数值与τ
max
的和,当输入为负数时,输出为τ
max
。
46.第二逻辑控制器:当输入为正时,输出为输入数值与τ
max
的和,当输入为负数时,输出为τ
max
。
47.第三逻辑控制器:当输入为正时,输出为输入数值与τ
min
的和,当输入为负数时,输出为τ
min
。
48.第四逻辑控制器:当输入为正时,输出为输入数值与τ
min
的和,当输入为负数时,输出为τ
min
。
49.将四个逻辑控制器加入到传统双关节三环控制模型中,得到双关节推挽式绳驱控制模型。
50.具体地,将第一逻辑控制器加在第一电机的电流控制环输出端和第一电机之间;第二逻辑控制器加在第二电机的电流控制环输出端和第二电机之间;第三逻辑控制器加在第三电机的电流控制环输出端和第三电机之间;第四逻辑控制器加在第四电机的电流控制环输出端和第四电机之间;
51.(3)根据双关节推挽式绳驱控制模型获得最终手指末端位置与姿态信息。
52.图2中,θ2表示第一关节旋转角度,r2表示第一关节旋转半径。图3中,θ3表示第二关节旋转角度,r3表示第二关节旋转半径。
53.本发明用于实现绳驱耦合双关节灵巧手高精度控制手指末端位置与姿态,从而实现手指与物体之间的接触位置规划和抓取姿态规划,该方法适用于绳驱灵巧手手指运动控制,或者其他绳驱智能机构的运动控制。本发明首先利用仿真或者实验手段获得双关节的干扰力矩和最小驱动力矩,然后根据干扰力矩和最小驱动力矩建立耦合双关节推挽式绳驱控制模型,由干扰力矩控制双关节耦合情况,由最小驱动力矩和四个逻辑控制器解决绳子必须拉紧不能反向驱动的问题,从而实现手指末端的高精度运动控制,为灵巧手实现多手指协同操作运动控制奠定基础。
54.本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。