1.本发明涉及激光切割机领域,尤其涉及一种厨具加工用锅边激光切割机。
背景技术:
2.激光切割机是将从激光器发射出的激光,经光路系统,聚焦成高功率密度的激光束。激光束照射到工件表面,使工件达到熔点或沸点,同时与光束同轴的高压气体将熔化或气化金属吹走,随着光束与工件相对位置的移动,最终使材料形成切缝,从而达到切割的目的。
3.现有技术公开了部分激光切割机方面的发明专利,申请号为cn202111067483.3的中国专利,公开了一种激光切割机,包括:上料机构,所述上料机构包括固定座、第一安装座、推杆、第一对辊式传送装置和第二对辊式传送装置;所述第一对辊式传送装置包括呈上下分布的两个第一压辊,所述第二对辊式传送装置包括第一转动元件和呈上下分布的至少两个第二压辊,所述第一压辊和所述第二压辊均转动设在所述第一安装座上,至少一所述第二压辊和所述第一转动元件传动相连,所述推杆分别挤设在两所述第一压辊之间和各所述第二压辊之间,所述固定座用于放置电路板或料盒,所述固定座上放置的所述电路板或料盒位于所述推杆的推送端。
4.目前高压锅在生产过程中会在锅口处加工出外凸卡环,以便高压锅盖与高压锅卡合,高压锅的锅口处的外凸卡环在后续的加工过程中,一般是通过激光进行切除,由于高压锅的锅口处的外凸卡环的侧壁为波动面,不便于根据实际激光切割的需要将激光切割头与待切割面之间的距离进行调整,并且对高压锅的激光切割后,会产生环形的边角料,环形的边角料搭在切割端面处,会对切割位置造成遮挡,不利于进行重复激光切割的处理。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种厨具加工用锅边激光切割机。
6.为达到以上目的,本发明采用的技术方案为:一种厨具加工用锅边激光切割机,包括激光切割机主体,所述激光切割机主体的内部通过位置调节架组件连接有激光头安装座,所述激光头安装座的端面上固定安装有激光切割头,所述激光头安装座的端面位于激光切割头的一侧固定安装有超声波距离传感器,所述激光切割机主体的底部固定连接有底座,所述底座上转动安装有圆环架,所述底座的侧壁上设置有第一驱动组件,所述第一驱动组件用以对圆环架进行旋转驱动;所述圆环架内固定连接有固定架;所述固定架的底面固定连接有圆柱座,所述圆柱座上转动设置有锅体承载组件,所述锅体承载组件用以对高压锅进行承载;所述固定架的上部设置有所述锅体下压组件,所述锅体下压组件用以对锅体进行按压定位;所述固定架的内部设置有边角料固定组件。
7.优选的,所述位置调节架组件包括纵向架,所述纵向架上滑动安装有移动架,所述移动架与纵向架之间通过第一丝杆调节机构螺纹连接,所述移动架的下部滑动安装有横向架,所述移动架与横向架之间通过第二丝杠调节机构螺纹连接,所述横向架的端部与激光头安装座固定连接。
8.优选的,所述第一驱动组件包括安装架一和齿环一,所述安装架一固定连接在所述底座的侧壁上,所述齿环一固定连接在所述圆环架的边缘处,所述安装架一上固定连接有电机一,所述电机一的转轴贯穿所述安装架一的侧壁后固定连接有齿轮一,所述齿轮一与所述齿环一相互啮合。
9.优选的,所述锅体承载组件包括安装槽和转动座,所述转动座转动安装在所述圆柱座的上表面,所述安装槽贯穿开设在圆柱座的下部,所述安装槽内固定连接有电机二,所述电机二的转动轴贯穿所述圆柱座的上表面后固定连在所述转动座的底面,所述转动座上固定连接有支撑架,所述支撑架的上部固定连接有托板,所述转动座上还设置有锅体定位组件,所述锅体定位组件用以对高压锅进行位置校正和固定。
10.优选的,所述锅体定位组件包括电机三,所述电机三固定连接在所述支撑架的下部,所述电机三的转轴贯穿所述支撑架的底面后固定连接有齿轮二,所述转动座的顶面开设有两个滑槽,两个所述滑槽内均滑动连接有齿板,所述齿板与所述齿轮二相互啮合,所述齿板的端部固定连接有弧形板,所述弧形板的外壁固定连接有防护垫。
11.优选的,所述锅体下压组件包括安装架二,所述安装架二固定连接在所述固定架的上部侧壁,所述安装架二上固定连接有气缸一,所述气缸一的伸缩杆贯穿所述安装架二后固定连接有压板,所述压板的下部转动连接有圆环板一,所述圆环板一上转动连接有圆环板二,所述压板上设置有边角料位置调整组件。
12.优选的,所述边角料位置调整组件包括四对导向杆,四对所述导向杆均匀等距固定连接在所述压板的侧壁上,同对所述导向杆上滑动连接有移动板,所述移动板远离所述压板的一端固定连接有竖杆,所述移动板靠近所述压板的一端固定连接有弹簧,所述弹簧靠近所述压板的一端固定连接在所述压板的侧壁上,所述移动板靠近所述压板的一端设有拨动组件,所述拨动组件用于拨动移动板向所述压板进行移动。
13.优选的,所述边角料固定组件包括两个电机五和四个轨道条,两个所述电机五均固定连接在所述固定架的侧壁上,同一个所述电机五两侧的两个所述轨道条固定连接在所述固定架的侧壁上,所述固定架上同侧的两个所述轨道条上共同滑动连接有升降架,所述升降架上对称安装有安装架四,所述安装架四上固定连接有气缸二,所述气缸二的伸缩杆贯穿所述安装架四的端面后固定连接有弹性伸缩杆,所述电机五的转轴上固定连接有丝杆,所述丝杆与所述升降架螺纹连接。
14.优选的,所述拨动组件包括安装架三、齿环二、圆弧槽一、压力开关和圆弧槽二,所述圆弧槽一和所述圆弧槽二开设在所述竖杆靠近所述压板的一端表面,所述圆弧槽一和所述圆弧槽二相连通,所述安装架三固定连接在所述压板的上表面,所述安装架三上固定连接有电机四,所述电机四的转轴贯穿所述安装架三的表面后固定连接有齿轮三,所述齿环二转动连接在所述压板的上表面,所述齿环二与所述齿轮三相互啮合,所述齿环二的侧壁均匀等距固定连接有四个横板,四个所述横板的端部均固定连接有推杆,所述推杆的下端滑动连接在所述圆弧槽二内,所述压力开关固定连接在所述固定架的侧壁上。
15.优选的,所述底座的侧壁还设有打磨抛光组件,所述打磨抛光组件包括两个轨道板,两个所述轨道板固定在所述底座的侧壁上,两个所述轨道板上共同滑动连接有移动架,所述移动架的底面固定连接有电机六,所述电机六的转轴贯穿所述移动架后固定连接有打磨片,两个所述轨道板的底面均固定连接有气缸三,所述气缸三的伸缩杆端部固定连接在所述移动架上。
16.与现有技术相比,本发明具有以下有益效果:本发明设置了边角料固定组件,通过设置边角料固定组件,可以对产生的环形边角料进行收集定位,避免再次激光切割加工而确保切割工作完成度时,上次切割产生的边角料对再次切割处理造成干扰;本发明设置了锅体定位组件,工作时,在高压锅放置在托板上之后,电机三的转轴带动齿轮二转动,使得齿轮二带动齿板推动弧形板相背运动,弧形板带动防护垫靠近高压锅的锅体内壁,对高压锅的位置进行调整,有利于托板与高压锅的中心在同一条轴线上,进而有利于避免电机二通过转动座和托板带动高压锅转动的过程中,高压锅出现偏移导致切割出现偏差的情况;本发明设置了边角料位置调整组件,在电机一通过齿轮一和齿环一带动圆环架转动一百八十度后,边角料落在圆环板二上后,启动拨动组件,拨动组件拨动移动板向所述压板进行移动,在移动板移动的过程中,移动板带动竖杆靠近边角料,对边角料进行拨正,有利于避免边角料落在圆环板二上后出现位置偏移,边角料的内圈与高压锅的侧壁接触的情况,有利于在对高压锅的激光切割处进行打磨或者修边的过程中,避免边角料对高压锅侧壁表面造成刮动损伤的情况发生。
附图说明
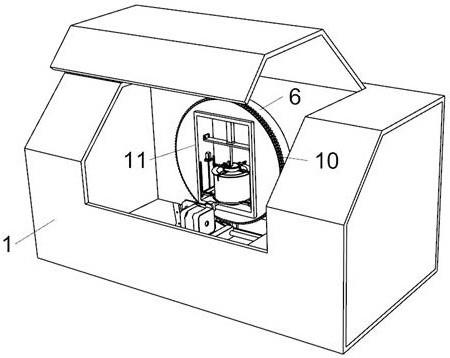
17.图1为本发明的结构示意图;图2为本发明的部分结构第一视角示意图;图3为本发明的部分结构第二视角示意图;图4为本发明的圆环架结构示意图;图5为本发明的圆柱座和转动座结构示意图;图6为本发明的锅体定位组件结构示意图;图7为本发明的废料环固定组件结构示意图;图8为本发明的废料环位置调整组件结构示意图;图9为本发明的压板示意图;图10为本发明的移动板示意图;图11为本发明的打磨抛光组件拆分示意图;图12为本发明的第一驱动组件示意图;图13为本发明的激光切割头和超声波距离传感器相对位置示意图;图14为高压锅和边角料示意图。
18.图中:1、激光切割机主体;2、纵向架;201、移动架;3、横向架;4、激光切割头;401、超声波距离传感器;5、底座;6、圆环架;7、安装架一;8、电机一;9、齿轮一;10、齿环一;11、固定架;12、圆柱座;13、安装槽;14、电机二;15、转动座;16、支撑架;17、托板;18、电机三;19、
齿轮二;20、齿板;21、弧形板;22、防护垫;23、安装架二;24、气缸一;25、压板;26、圆环板一;261、圆环板二;27、安装架三;28、电机四;29、齿轮三;30、齿环二;31、横板;32、推杆;33、导向杆;34、移动板;35、竖杆;36、弹簧;37、圆弧槽一;38、圆弧槽二;39、轨道条;40、升降架;41、安装架四;42、气缸二;4201、弹性伸缩杆;43、丝杆;44、电机五;45、轨道板;46、移动架;47、电机六;49、打磨片;50、气缸三;51、高压锅;52、边角料;53、压力开关。
实施方式
19.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
20.如图1至图14所示的一种厨具加工用锅边激光切割机,包括激光切割机主体1,激光切割机主体1的内部通过位置调节架组件连接有激光头安装座,激光头安装座的端面上固定安装有激光切割头4,激光头安装座的端面位于激光切割头4的一侧固定安装有超声波距离传感器401,激光切割机主体1的底部固定连接有底座5,底座5上转动安装有圆环架6,底座5的侧壁上设置有第一驱动组件,第一驱动组件用以对圆环架6进行旋转驱动;圆环架6内固定连接有固定架11;固定架11的底面固定连接有圆柱座12,圆柱座12上转动设置有锅体承载组件,锅体承载组件用以对高压锅51进行承载;固定架11的上部设置有锅体下压组件,锅体下压组件用以对锅体进行按压定位;固定架11的内部设置有边角料固定组件;工作时,目前高压锅在生产过程中会在锅口处加工出外凸卡环,以便高压锅盖与高压锅卡合,高压锅的锅口处的外凸卡环在后续的加工过程中,一般是通过激光进行切除,由于高压锅的锅口处的外凸卡环的侧壁为波动面,不便于根据实际激光切割的需要将激光切割头与待切割面之间的距离进行调整,并且对高压锅的激光切割后,会产生环形的边角料,环形的边角料搭在切割端面处,会对切割位置造成遮挡,不利于进行重复激光切割的处理,本发明的该实施例可以解决以上问题,具体实施方式如下,将高压锅51放置在圆柱座12上面的锅体承载组件上,然后启动锅体下压组件,在高压锅51被固定后,锅体承载组件带着高压锅51转动,启动激光切割装置,对高压锅51的切割处进行切割,切割产生边角料52,接着启动第一驱动组件,第一驱动组件带动圆环架6转动,使得高压锅51的锅口朝上,边角料52掉落在高压锅51的锅底处,有利于边角料52与高压锅51的锅口处分离开来,接着启动边角料固定组件,对边角料52进行固定,有利于边角料52与高压锅51的锅口处分离后的固定,接着再次启动第一驱动组件,第一驱动组件带动圆环架6转动,使得高压锅51恢复到初始位置,通过设置边角料固定组件,可以对产生的环形边角料52进行收集定位,避免再次激光切割加工而确保切割工作完成度时,上次切割产生的边角料52对再次切割处理造成干扰;在整个激光切割的过程中,超声波距离传感器401会提前对将要切割的高压锅的锅口处的外凸卡环的侧壁与激光切割头4之间的距离进行识别,并且将距离信息发送给外设的控制芯片,通过外设的控制芯片对距离进行识别,并且发送控制信息给位置调节架组件,用以控制位置调节架组件调整激光切割头4与高压锅的锅口处的外凸卡环的侧壁的距离,使得激光切割头4得到移动调节,有利于保持激光切割头4与高压锅的锅口处的外凸卡环的侧壁的距离维持在合理的范围内。
21.作为本发明的一种实施方式,位置调节架组件包括纵向架2,纵向架2上滑动安装有移动架201,移动架201与纵向架2之间通过第一丝杆调节机构螺纹连接,移动架201的下部滑动安装有横向架3,移动架201与横向架3之间通过第二丝杠调节机构螺纹连接,横向架3的端部与激光头安装座固定连接;工作时,在整个激光切割的过程中,超声波距离传感器会提前对将要切割的高压锅的锅口处的外凸卡环的侧壁与激光切割头4之间的距离进行识别,并且将距离信息发送给外设的控制芯片,通过外设的控制芯片对距离进行识别,并且发送控制信息给位置调节架组件,位置调节架组件通过第一丝杆调节机构螺纹驱动移动架201在纵向架2上进行距离调节,进而间接调整高压锅的锅口处的外凸卡环的侧壁与激光切割头4之间的距离,通过设置第二丝杠调节机构可以螺纹驱动横向架3相对移动架201进行横向移动,进而实现了对激光切割头4的横向移动和纵向移动的选择性调节,以确保激光切割头4处于理想的位置。
22.作为本发明的一种实施方式,第一驱动组件包括安装架一7和齿环一10,安装架一7固定连接在底座5的侧壁上,齿环一10固定连接在圆环架6的边缘处,安装架一7上固定连接有电机一8,电机一8的转轴贯穿安装架一7的侧壁后固定连接有齿轮一9,齿轮一9与齿环一10相互啮合;工作时,在高压锅51上的边角料52被切除后,边角料52套设在高压锅51的锅体外部,启动电机一8,电机一8带动齿轮一9转动,使得齿环一10带动圆环架6和高压锅51进行转动,在转动一百八十度后,高压锅51的锅口朝上,在齿环一10带动圆环架6和高压锅51进行转动的过程中,边角料52从高压锅51的锅口处落到高压锅51的锅底处,在边角料52从高压锅51的锅口处落到高压锅51的锅底处后,边角料固定组件对边角料52进行固定,在边角料52被固定后,再次启动电机一8,使得齿环一10带动圆环架6和高压锅51进行转动恢复到初始状态,这样边角料52与高压锅51的锅口处分离,一方面有利于避免在高压锅51的激光切割处再次激光切割以实现补切的过程中对激光切割造成干扰,或者其他修边的工作造成干扰,另一方面避免在对高压锅51进行旋转过程中,边角料52与高压锅51发生摩擦,对高压锅51的表面造成刮伤的情况发生。
23.作为本发明的一种实施方式,锅体承载组件包括安装槽13和转动座15,转动座15转动安装在圆柱座12的上表面,安装槽13贯穿开设在圆柱座12的下部,安装槽13内固定连接有电机二14,电机二14的转动轴贯穿圆柱座12的上表面后固定连在转动座15的底面,转动座15上固定连接有支撑架16,支撑架16的上部固定连接有托板17,转动座15上还设置有锅体定位组件,锅体定位组件用以对高压锅51进行位置校正和固定;工作时,将高压锅51放置在托板17上,然后启动锅体定位组件,锅体定位组件用以对高压锅51进行位置校正和固定,接着启动锅体下压组件,使得高压锅51被固定,然后就可以启动电机二14,电机二14带动转动座15、托板17和高压锅51转动,使得高压锅51下部多余的边角料52被切除,通过锅体定位组件,有利于对放置在托板17上的高压锅51进行夹持定位,有利于提高高压锅51位置的准确性,有利于保证激光切割头4在高压锅51上切割位置的准确性。
24.作为本发明的一种实施方式,锅体定位组件包括电机三18,电机三18固定连接在支撑架16的下部,电机三18的转轴贯穿支撑架16的底面后固定连接有齿轮二19,转动座15的顶面开设有两个滑槽,两个滑槽内均滑动连接有齿板20,齿板20与齿轮二19相互啮合,齿板20的端部固定连接有弧形板21,弧形板21的外壁固定连接有防护垫22;工作时,在高压锅51放置在托板17上之后,启动电机三18,电机三18的转轴带动齿轮二19转动,使得齿轮二19
带动齿板20推动弧形板21相背运动,弧形板21带动防护垫22靠近高压锅51的锅体内壁,对高压锅51的位置进行调整,有利于托板17与高压锅51的中心在同一条轴线上,进而有利于避免电机二14通过转动座15和托板17带动高压锅51转动的过程中,高压锅51出现偏移导致切割出现偏差的情况。
25.作为本发明的一种实施方式,锅体下压组件包括安装架二23,安装架二23固定连接在固定架11的上部侧壁,安装架二23上固定连接有气缸一24,气缸一24的伸缩杆贯穿安装架二23后固定连接有压板25,压板25的下部转动连接有圆环板一26,圆环板一26上转动连接有圆环板二261,压板25上设置有边角料位置调整组件;工作时,在高压锅51放置在托板17上并经过位置调整之后,启动气缸一24,气缸一24的伸缩杆带动压板25下降,使得圆环板一26压在高压锅51的锅体底面上,有利于提高高压锅51在加工过程中的稳定性,启动电机二14,使得转动座15和托板17带动高压锅51转动,在转动的过程中高压锅51的边角料52被激光切割头4切除,在高压锅51的边角料52被激光切除后,电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度后,边角料52落在圆环板二261上后被边角料位置调整组件进行位置调整后边角料固定组件固定。
26.作为本发明的一种实施方式,边角料位置调整组件包括四对导向杆33,四对导向杆33均匀等距固定连接在压板25的侧壁上,同对导向杆33上滑动连接有移动板34,移动板34远离压板25的一端固定连接有竖杆35,移动板34靠近压板25的一端固定连接有弹簧36,弹簧36靠近压板25的一端固定连接在压板25的侧壁上,移动板34靠近压板25的一端设有拨动组件,拨动组件用于拨动移动板34向压板25进行移动;工作时,在电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度后,边角料52落在圆环板二261上后,边角料52落在圆环板二261上的位置难以确定,可能会出现边角料52偏移,边角料52被边角料固定组件固定后出现边角料52的内圈与高压锅51的侧壁接触的情况,导致在后续边角料52被固定后,电机二14带动转动座15、托板17和高压锅51的整体转动而进行其他修边工作时,边角料52与转动的转动高压锅51的侧壁接触,导致高压锅51的侧壁被边角料52磨损刮花的情况,本发明的该实施例可以解决以上问题,具体实施方式如下,在电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度后,边角料52落在圆环板二261上后,启动拨动组件,拨动组件拨动移动板34向压板25进行移动,在移动板34移动的过程中,移动板34带动竖杆35靠近边角料52,对边角料52进行拨正,有利于避免边角料52落在圆环板二261上后出现位置偏移,边角料52的内圈与高压锅51的侧壁接触的情况,有利于在对高压锅51的激光切割处进行打磨或者修边的过程中,避免边角料52对高压锅51侧壁表面造成刮动损伤的情况发生。
27.作为本发明的一种实施方式,边角料固定组件包括两个电机五44和四个轨道条39,两个电机五44均固定连接在固定架11的侧壁上,同一个电机五44两侧的两个轨道条39固定连接在固定架11的侧壁上,固定架11上同侧的两个轨道条39上共同滑动连接有升降架40,升降架40上对称安装有安装架四41,安装架四41上固定连接有气缸二42,气缸二42的伸缩杆贯穿安装架四41的端面后固定连接有弹性伸缩杆4201,电机五44的转轴上固定连接有丝杆43,丝杆43与升降架40螺纹连接;工作时,在电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度,边角料52落在圆环板二261上后,边角料52被竖杆35拨动,实现位置调整后,首先启动气缸二42,使得气缸二42的伸缩杆端部的弹性伸缩杆4201贴近高压锅51的侧壁,然后启动电机五44,电机五44的转轴带动丝杆43转动,丝杆43的转动使得升降架40带
动气缸二42向着电机五44的方向移动最终靠近圆环板二261,将落在圆环板二261上的边角料52进行限位,有利于避免电机一8通过齿轮一9和齿环一10带动圆环架6回到初始位置时,边角料52掉落到高压锅51锅口的位置,需要进一步说明的是,在电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度,边角料52落在圆环板二261上的过程中,边角料52可能会出现挂在高压锅51侧壁上的情况,导致不能落在圆环板二261上的情况,因此升降架40可以进行运动,升降架40带着气缸二42的移动,气缸二42伸缩杆端部的弹性伸缩杆4201贴着高压锅51的侧壁移动,这个过程是将边角料52推到圆环板二261上,避免出现边角料52挂在高压锅51侧壁上的情况,保证边角料52落到圆环板二261上,然后通过边角料位置调整组件对边角料52的位置进行调整,有利于实现将边角料52限位在理想位置,并且内环面与高压锅51侧壁保持距离。
28.作为本发明的一种实施方式,拨动组件包括安装架三27、齿环二30、圆弧槽一37、压力开关53和圆弧槽二38,圆弧槽一37和圆弧槽二38开设在竖杆35靠近压板25的一端表面,圆弧槽一37和圆弧槽二38相连通,安装架三27固定连接在压板25的上表面,安装架三27上固定连接有电机四28,电机四28的转轴贯穿安装架三27的表面后固定连接有齿轮三29,齿环二30转动连接在压板25的上表面,齿环二30与齿轮三29相互啮合,齿环二30的侧壁均匀等距固定连接有四个横板31,四个横板31的端部均固定连接有推杆32,推杆32的下端滑动连接在圆弧槽二38内,压力开关53固定连接在固定架11的侧壁上;工作时,在通过边角料固定组件对在电机一8通过齿轮一9和齿环一10带动圆环架6转动一百八十度,边角料52在重力的作用下沿着高压锅51侧壁向圆环板二261方向滑动,然后启动边角料固定组件对边角料52进行下压拨动,在边角料固定组件对边角料52进行下压拨动的过程中,升降架40挤压到压力开关53时,压力开关53控制电机四28启动,电机四28带动齿轮三29转动,齿轮三29的转动带动齿环二30转动,齿环二30的转动带动横板31和推杆32转动,推杆32在圆弧槽二38内滑动,使得移动板34向着压板25的方向移动,移动板34则会带动竖杆35拨动边角料52,实现多个位置的竖杆35同步内侧移动,实现边角料52位置的调整,实现在纵向和横向均对边角料52进行限位,实现将边角料52限位在理想位置,并且内环面与高压锅51侧壁保持距离,有利于避免边角料52落在圆环板二261上时,边角料52为的位置出现偏移,边角料52的内圈出现与高压锅51的侧壁接触的情况。
29.需要进一步说明的是,上述实施例中提到的修边的工作,例如,对激光切割后的切割端口进行打磨修边,如图3和图11所示,底座5的侧壁还设有打磨抛光组件,打磨抛光组件包括两个轨道板45,两个轨道板45固定在底座5的侧壁上,两个轨道板45上共同滑动连接有移动架46,移动架46的底面固定连接有电机六47,电机六47的转轴贯穿移动架46后固定连接有打磨片49,两个轨道板45的底面均固定连接有气缸三50,气缸三50的伸缩杆端部固定连接在移动架46上;工作时,在边角料52被固定后,电机一8通过齿轮一9和齿环一10带动圆环架6转动到初始位置后,启动气缸三50,气缸三50拉动移动架46带着打磨片49靠近底座5,然后启动电机六47,电机六47的转轴带动打磨片49转动,对高压锅51的激光切割处进行打磨。
30.本发明工作原理:工作时,目前高压锅在生产过程中会在锅口处加工出外凸卡环,以便高压锅盖与高压锅卡合,高压锅的锅口处的外凸卡环在后续的加工过程中,一般是通过激光进行切除,由于高压锅的锅口处的外凸卡环的侧壁为波动面,不便于根据实际激光
切割的需要将激光切割头4与待切割面之间的距离进行调整,并且对高压锅的激光切割后,会产生环形的边角料,环形的边角料搭在切割端面处,会对切割位置造成遮挡,不利于进行重复激光切割的处理,本发明的该实施例可以解决以上问题,具体实施方式如下,将高压锅51放置在圆柱座12上面的锅体承载组件上,然后启动锅体下压组件,在高压锅51被固定后,锅体承载组件带着高压锅51转动,启动激光切割装置,对高压锅51的切割处进行切割,切割产生边角料52,接着启动第一驱动组件,第一驱动组件带动圆环架6转动,使得高压锅51的锅口朝上,边角料52掉落在高压锅51的锅底处,有利于边角料52与高压锅51的锅口处分离开来,接着启动边角料固定组件,对边角料52进行固定,有利于边角料52与高压锅51的锅口处分离后的固定,接着再次启动第一驱动组件,第一驱动组件带动圆环架6转动,使得高压锅51恢复到初始位置,通过设置边角料固定组件,可以对产生的环形边角料52进行收集定位,避免再次激光切割加工而确保切割工作完成度时,上次切割产生的边角料52对再次切割处理造成干扰;在整个激光切割的过程中,超声波距离传感器401会提前对将要切割的高压锅的锅口处的外凸卡环的侧壁与激光切割头4之间的距离进行识别,并且将距离信息发送给外设的控制芯片,通过外设的控制芯片对距离进行识别,并且发送控制信息给位置调节架组件,用以控制位置调节架组件调整激光切割头4与高压锅的锅口处的外凸卡环的侧壁的距离,使得激光切割头4得到移动调节,有利于保持激光切割头4与高压锅的锅口处的外凸卡环的侧壁的距离维持在合理的范围内。
31.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。