1.本发明涉及一种用于检测支承杆在托盘中的悬挂位置的方法,所述托盘设置用于与平板机床、特别是激光切割平板机床或等离子切割平板机床一起使用。本发明还涉及一种适用于实施所述方法的平板机床。
背景技术:
2.平板机床、特别是激光切割平板机床或等离子切割平板机床通常具有进行(例如激光)加工的机器区域。机器区域被配置给在用于原材料和/或切割材料的上游和可选的下游的存放区域。在平板机床的情况下,待加工的材料面板(例如金属板材)可以在托盘上供送到机器区域。托盘通常包括支承杆的布置,待加工的材料面板可以借助于支承杆的布置被安装在支承平面中。根据实施例,支承杆可以仅铺设在托盘的特定位置。
3.托盘可以例如是托盘更换器的一部分,托盘更换器代表平板机床上游的存放区域。在加工后,托盘上可能有大量的被切割工件。工件可以在分拣过程中由操作者手动或以(部分)自动方式从托盘移除。托盘上的生产的工件与支承结构之间的相对位置对于生产过程和分拣过程都是重要的。
4.支承杆通常以板的形式配置并且具有均匀间隔开的支承尖端,支承尖端沿支承杆的一个边缘/边侧形成。支承杆以向上指向的支承尖端竖直插入,以便为材料面板和被切割工件形成多个支承点,所述支承点限定支承平面。在插入状态下,多个支承杆彼此平行地延伸。支承杆沿托盘的纵向范围以它们彼此之间的间距可调节地布置并且可以例如在托盘的框架上悬挂在等间隔(悬挂)的位置。因此,可以根据需要配置托盘的支承杆的布置,即例如专门针对加工顺序选择支承杆沿纵向范围的位置。在支承尖端的区域中形成支承区域,支承杆可以在支承区域中与安装在支承平面中的材料面板接触。
5.现代排料方法还允许待加工的材料面板被根据给定支承杆配置切割的工件占据。特别是,工件在这种情况下相对于支承杆尖端或支承区域的位置定向。例如通过避免工件倾斜和倾斜的工件随后与平板机床的切割头的碰撞、或通过对于激光采用特定(破坏性较小)穿孔位置,基于支承杆的位置用工件占据面板允许减少支承杆尖端的磨损并提高过程的质量。基于支承杆或支承区域的位置用工件占据面板的起点是知道要使用的支承杆配置,支承杆配置尤其由支承杆的悬挂位置决定。然而由于不知道安装了哪些支承杆,因此在某些情况下,并非平板机床的所有应用都可以考虑支承杆位置。
6.已知例如借助于机器区域内(例如固定在切割头上)的间距传感器系统或通过激光三角测量来检测支承杆的位置。然而由于空托盘的“扫描”,此类方法带来非生产性停机。
技术实现要素:
7.本公开文件的一个方面的任务在于,提供一种用于检测支承杆和/或支承杆尖端的悬挂位置的方法。所述方法应该特别是在实践中经常出现的不利条件下、例如在存在不确定照明的情况下或者在支承杆尖端磨损或受熔渣影响的情况下也可以被实施。所述方法
应该尽管出现的支承杆的表面状态也提供尽可能稳健、快速和准确的结果。
8.所述任务之一通过根据权利要求1所述的方法和根据权利要求16所述的平板机床来解决。进一步方案在从属权利要求中给出。
9.在一个方面中公开了一种能够检测支承杆在托盘中的悬挂位置的方法。所述托盘沿纵向方向为了与平板机床、特别是激光切割平板机床或等离子切割平板机床一起使用而装备有多个支承杆,所述支承杆中的每个支承杆沿着横向于托盘的纵向方向定向的主延伸方向具有多个支承杆尖端,并且所述多个支承杆的支承杆尖端限定支承平面。所述方法包括以下步骤:
[0010]-建立托盘的二维对比图像数据组,所述二维对比图像数据组具有多个图像像素,其中,给每个图像像素配置支承平面的像素值和像素面积单元,并且对比图像数据组包括在统一像素值背景中作为局部像素值极值的、配置给所述支承杆尖端的区域,
[0011]-通过使用所述局部像素值极值来确定配置给所述多个支承杆之一的支承杆尖端的区域在对比图像数据组中的纵向位置,以及
[0012]-根据在对比图像数据组中的纵向位置和像素面积单元在纵向方向上的大小推导出支承杆在托盘中的悬挂位置。
[0013]
在一个另外的方面中,平板机床、特别是激光切割平板机床或等离子切割平板机床包括:
[0014]
托盘,所述托盘具有悬挂在悬挂位置上的多个支承杆,所述支承杆中的每个支承杆具有多个支承杆尖端,所述支承杆尖端限定支承平面,
[0015]
摄像机,所述摄像机用于产生托盘的二维摄像机图像或二维暗场摄像机图像,以及
[0016]
评估装置。
[0017]
摄像机和/或评估装置设计用于
[0018]-建立托盘的二维对比图像数据组,所述二维对比图像数据组具有多个图像像素,给每个图像像素配置支承平面的像素值和像素面积单元,并且对比图像数据组包括在统一像素值背景中作为局部像素值极值的、配置给所述支承杆尖端的区域,
[0019]
所述评估装置还设计用于:
[0020]-通过使用所述局部像素值极值来确定配置给所述多个支承杆之一的支承杆尖端的区域在对比图像数据组中的纵向位置,以及
[0021]-根据在对比图像数据组中的纵向位置和像素面积单元在纵向方向上的大小推导出支承杆在托盘中的悬挂位置。
[0022]
在一些进一步方案中,配置给支承杆尖端的区域之一可以被配置给一个支承杆尖端和/或被配置给延伸到支承杆尖端的边侧。
[0023]
在一些进一步方案中,统一像素值背景可以不表示结构和/或包括具有恒定像素值或围绕恒定像素值的随机像素值分布的图像像素。
[0024]
在一些进一步方案中,托盘的对比图像数据组的建立还可以包括:
[0025]-在可见和/或红外光谱中产生托盘二维摄像机图像,所述摄像机图像具有成行和列地布置的图像像素,给所述图像像素分别配置支承平面的像素面积单元,
[0026]-将摄像机图像傅立叶变换到频域并且输出变换频率数据组,
[0027]-将变换频率数据组滤波以突出显示频域中的属于配置给支承杆尖端的区域的频率,以及
[0028]-借助于傅立叶逆变换将经滤波的变换频率数据组反向变换成反向变换的图像数据组,并且将反向变换的图像数据组作为对比图像数据组输出。
[0029]
在一些进一步方案中,在主延伸方向上相邻的支承杆尖端可以彼此具有基本相同的尖端间距。对变换频率数据组的滤波则可以包括:在频域中识别配置给尖端间距的频带并且将变换频率数据组限制到所述频带。频带可以例如围绕尖端重复频率形成,所述尖端重复频率被配置给主延伸方向。尖端重复频率可以特别是由以下得出:
[0030][0031]
其中,
[0032]
h:支承平面在主延伸方向上的在摄像机图像中表示的区域的像素的数量,
[0033]
δx:像素面积单元在主延伸方向上的大小,以及
[0034]
d:相邻的支承杆尖端的尖端间距。
[0035]
在一些进一步方案中,二维摄像机图像的产生可以通过在近红外频谱中产生托盘的暗场摄像机图像进行,并且可以从拍摄方向拍摄暗场摄像机图像,所述拍摄方向与支承平面围成一定角度,该角度处于10
°
至70
°
的范围内、特别是大于45
°
、例如是60
°
,并且所述拍摄方向与主延伸方向成70
°
至110
°
的范围内的角度延伸、特别是垂直于主延伸方向延伸。
[0036]
在一些进一步方案中,托盘的对比图像数据组的建立还可以包括:通过从与支承平面围成一定角度的拍摄方向在近红外频谱中产生托盘的暗场摄像机图像来产生对比图像数据组。该角度可以例如处于10
°
至70
°
的范围内、特别是大于45
°
、例如是60
°
。此外,拍摄方向可以与主延伸方向成70
°
至110
°
的范围内的角度延伸、特别是垂直于主延伸方向延伸。
[0037]
在一些进一步方案中,托盘的对比图像数据组的建立还可以包括:从一个或多个照射方向以近红外频谱的光从上方照射托盘。所述光可以特别是处于845nm至855nm和/或935nm至945nm的频谱中。
[0038]
在一些进一步方案中,所述照射方向中的至少一个照射方向可以与支承平面围成一定角度,该角度小于30
°
并且特别是处于10
°
至20
°
的范围内、例如是大约15
°
,并且所述照射方向中的投影到支承平面中的至少一个照射方向可以与支承杆的主延伸方向围成一定角度,该角度小于30
°
并且特别是处于10
°
至25
°
的范围内、例如是大约15
°
。
[0039]
在一些进一步方案中,二维摄像机图像的产生或二维暗场摄像机图像的产生可以包括:拍摄多个部分摄像机图像,所述多个部分摄像机图像分别二维地表示托盘的部分区域,并且将部分摄像机图像组合成托盘的二维摄像机图像或二维暗场摄像机图像。
[0040]
在一些进一步方案中,对比图像数据组中的纵向位置的确定可以包括:
[0041]
通过使用模板实施模板匹配图像分析。模板可以形成为具有多个支承杆尖端的支承杆、特别是布置在托盘的内部区域中的支承杆的图像数据组。
[0042]
在一些进一步方案中,对比图像数据组中的纵向位置的确定可以包括:相应于主延伸方向逐行地将对比图像数据组的图像像素的像素值求,并且输出第一像素值总和的第一分布,以及确定第一分布中的局部极值并且将局部极值的行作为纵向位置输出。
[0043]
在一些进一步方案中,所述方法还可以包括:
[0044]-相应于所述纵向方向在局部极值的区域中逐列地将对比图像数据组的图像像素的像素值求和并且输出第二像素值总和的第二分布,
[0045]-确定所述第二分布中的多个局部极值并且输出所述局部极值的列,以及
[0046]-根据已确定的局部极值的相应行和已确定的局部极值的列来确定对比度图像数据组中的配置给所述支承杆尖端的区域的图像位置。
[0047]
在一些进一步方案中,支承杆可以在托盘的纵向侧悬挂在预定的悬挂位置,并且主延伸方向可以横向于纵向侧延伸,并且托盘可以具有参考结构,所述参考结构能够在对比图像数据组中被识别为参考像素布置。可以通过在对比图像数据组中求得参考像素布置与横向于主延伸方向的纵向位置之间的间距,并且基于所求得的间距识别用于纵向位置的预定的悬挂位置之一来推导出支承杆在托盘中的悬挂位置。
[0048]
在一些进一步方案中,像素值可以是灰度值、色值或亮度值。
[0049]
在一些进一步方案中,摄像机可以设置用于:
[0050]-在可见光谱或红外光谱中产生托盘的二维摄像机图像,其中,所述摄像机图像具有成行和列地布置的图像像素,给所述图像像素分别配置支承平面的像素面积单元,或者
[0051]-通过从拍摄方向在近红外频谱中拍摄托盘的二维暗场摄像机图像来产生对比图像数据组。
[0052]
在一些进一步方案中,评估装置可以设计用于实施所述方法和/或可以包括处理器,
[0053]
所述处理器设置用于:
[0054]-将摄像机图像傅立叶变换到频域并且输出变换频率数据组,
[0055]-将变换频率数据组滤波以突出显示频域中的属于配置给支承杆尖端的区域的频率,以及
[0056]-借助于傅立叶逆变换将经滤波的变换频率数据组反向变换,并且将被反向变换的图像数据组作为对比图像数据组输出。
[0057]
在一些进一步方案中,可以提供至少一个照明装置,所述至少一个照明装置设计用于从一个或多个照射方向以近红外频谱的光照射托盘。照射方向中的至少一个照射方向可以与支承平面围成一定角度,该角度小于30
°
并且特别是处于10
°
至20
°
的范围内、例如是大约15
°
。照射方向中的投影到支承平面中的至少一个照射方向可以与支承杆的主延伸方向围成一定角度,该角度小于30
°
并且特别是处于10
°
至25
°
的范围内、例如是大约15
°
。
[0058]
在一些进一步方案中,所述方法可以包括:确定配置给各个支承杆尖端的区域在配置给第一局部像素值总和极值的列或行内的各个位置。为此目的,例如可以实施平行投影图像分析,在所述平行投影图像分析中,将对比图像数据组的配置给第一局部像素值总和极值、即配置给支承杆的列或行的图像像素的像素值垂直于支承杆的主延伸方向(逐行地或逐列地)求和为第二像素值总和,所述第二像素值总和被配置给相应行或列。基于此可以确定行或列,配置给所述行或列的像素值总和形成第二局部像素值总和极值。
[0059]
在一些进一步方案中,对比图像数据组中的配置给支承杆尖端的区域的纵向位置的确定可以替换地或附加地包括:实施滑动窗口方法图像分析或者基于sift算法的图像分析或者基于神经网络的图像分析,在所述滑动窗口方法图像分析中围绕模板匹配滤波器建立框架。
附图说明
[0060]
在此公开了允许至少部分地改进现有技术的方面的方案。特别是借助附图由实施方式的以下描述得出另外的特征及其有效性。附图中:
[0061]
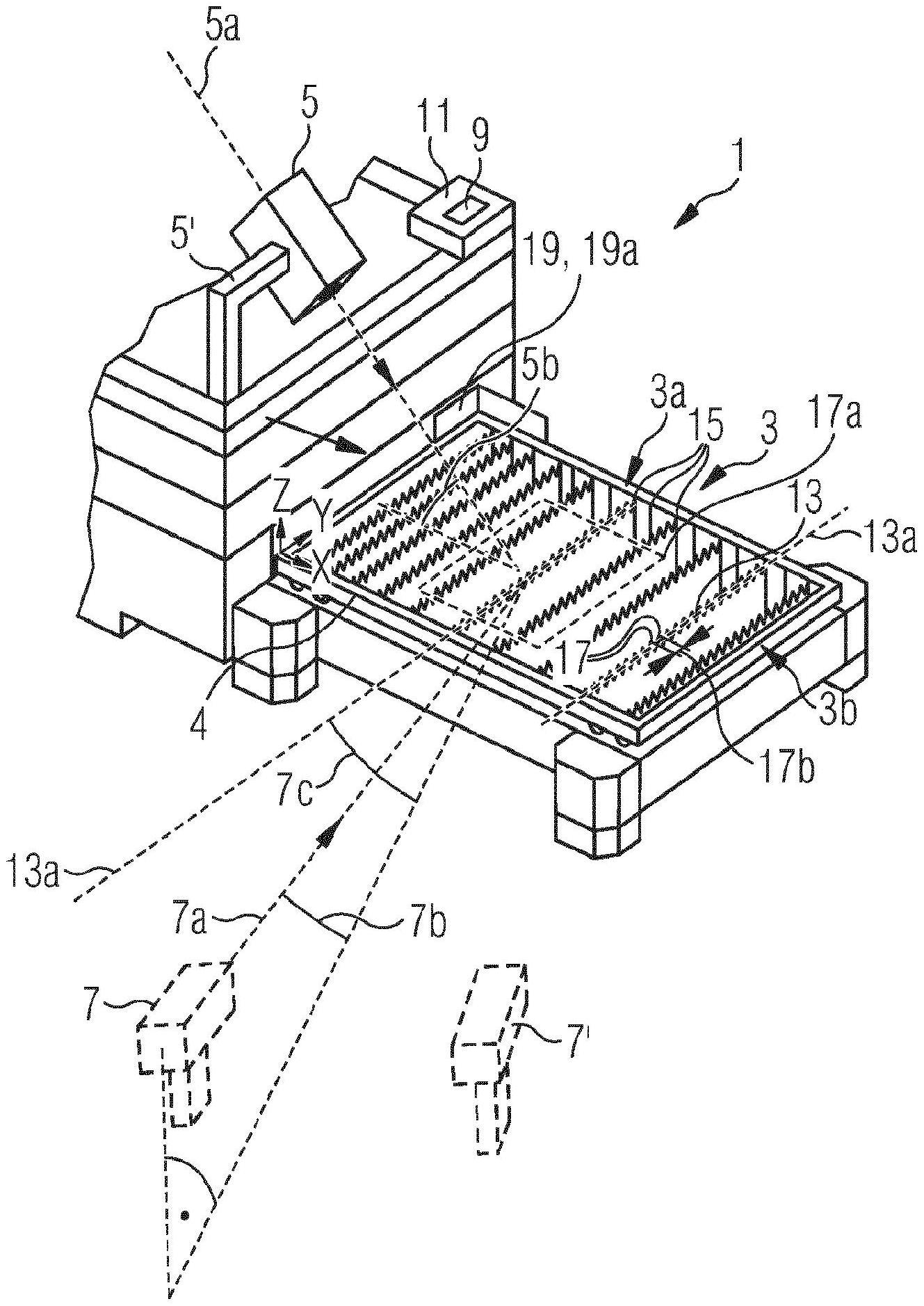
图1示出了具有装备有多个支承杆的托盘的平板机床的示意性的空间视图,
[0062]
图2示出了用于阐述用于检测支承杆在托盘中的悬挂位置的方法的流程图,
[0063]
图3示出了示例性的托盘的被校正的摄像机图像(俯视图),
[0064]
图4示出了摄像机图像的关于频域的变换频率数据组的幅谱的视图,
[0065]
图5示出了借助于经滤波的傅立叶变换产生的示例性的对比图像数据组的彼此并排的区段以及托盘的所属的摄像机图像的区段,
[0066]
图6示出了用于阐述借助于频域中的傅立叶变换和滤波来计算托盘的对比图像数据组的流程图,
[0067]
图7示出了借助于暗场照明产生的示例性的对比图像数据组,
[0068]
图8示出了用于阐述借助于暗场照明和暗场拍摄将托盘的对比图像数据组成像的流程图,以及
[0069]
图9示出了用于模板图像分析的示例性的模板的区段。
具体实施方式
[0070]
在此描述的方面部分地基于以下认识,如果使用了其中突出显示了支承杆尖端并且其他“干扰”结构在很大程度上被抑制或未示出的对比图像数据组,则可以稳健、快速且高度准确地实施通过图像识别、特别是针对检测图像杆尖端的图像识别对支承杆的悬挂位置的检测。干扰结构可能是由于例如存在不确定的照明、磨损、熔渣和支承杆的表面状态的情况引起的。使用这种低干扰对比图像数据组,可以减少错误的支承杆检测。此外,可以降低图像分析的复杂性。
[0071]
发明人还意识到对比图像数据组可以通过傅立叶变换并且通过暗场照明或暗场拍摄来建立。此外,这两种方式也可以例如通过在借助于傅立叶变换对借助于暗场照明或暗场拍摄建立的(摄像机)图像传递到对比图像数据组之前对其进行后续滤波而彼此组合。这两种方式的这种组合可以实现干扰更低的对比图像数据组。
[0072]
在这两种情况中,首先使用摄像机拍摄(通常未占用的)托盘,然后将其透视变换为“俯视图”,使得支承杆在图像中纵向或横向显现为例如沿支承杆的主延伸方向延伸的(竖直或水平)线。拍摄也可以由各种摄像机的多个部分拍摄组合在一起,并且不仅在机器外部(“前面”)而且在机器内部(即在生产空间中)拍摄。
[0073]
在要评估的拍摄中,支承平面在对比图像数据组中表示为没有透视失真。为了校正,可以例如通过通常的单应性方法来处理原始透视失真的图像。因此,可以给每个图像像素配置支承平面的像素面积单元,特别是对于例如1mm2的所有图像像素具有相同尺寸的方形像素面积单元。以这种方式校正后,支承平面中的相同尺寸的对象可以在对比图像数据组中以相同尺寸表示,而不管单个对象在支承平面或对比图像数据组中的位置如何。如果图像像素在支承杆的延伸方向上及其横向上的大小是已知的,则校正可以使确定配置给支承杆尖端的区域的纵向位置(并且由此确定所属的支承杆的纵向位置)变得简单。
[0074]
在此公开的方案由此还基于的是,使用托盘的对比图像数据组,在所述对比图像
数据组中突出显示了配置给支承杆尖端的区域。示例性地,这样的高对比度图像数据组可以通过特殊的成像布置或图像分析方法(或两种方法的组合)来获得。在在此作为示例更详细地阐述了傅立叶图像处理过程中的滤波和暗场成像的应用。借助于傅立叶图像处理的滤波和暗场成像的应用在在此可以例如首先通过应用暗场成像拍摄托盘的(摄像机)图像并且然后借助于傅立叶图像处理对此图像进行滤波处理而用作替代方案或者彼此组合。从示例性的所述实施例的共同描述中,这种或其他方法的修改将是显而易见的。
[0075]
傅立叶变换是图像处理领域中常见的图像数据组到变换频率数据组的变换,所述图像数据组被称为第一参考系统,即所谓的图像或空间域,所述变换频率数据组被称为第二参考系统,即所谓的频域。
[0076]
在傅立叶变换中,空间域中的周期性规律出现的、即关于托盘的几何形状的图案在变换图像数据组的频域中被配置频率。沿像素布置成行的方向在空间域中周期性规律出现的图案在幅谱中的变换频率数据组的表示中表示为水平或竖直(频率)线,并且因此很容易检测到。支承杆尖端还沿着支承杆的主延伸方向在图像数据组中形成重复图案,并且因此可以在变换频率数据组中被配置频率。所述频率也在幅谱中表示为线(假设支承杆的相应的定向)。
[0077]
变换频率数据组的滤波允许突出显示配置给支承杆尖端的频率,并且相比之下,其他频率被(相对)减少或甚至去除。经滤波的变换频率数据组的后续反向变换允许输出(关于图像域的)图像数据组,在所述图像数据组中以高对比度突出显示支承杆尖端。相比之下,未明确配置给支承杆的“干扰”结构或纹理至少会减少,使得换句话说,支承杆尖端的区域可以表示为托盘的对比图像数据组内的统一像素值背景中的局部像素值极值。
[0078]
在这种情况下,局部像素值极值可以是一组相邻的图像像素或单个图像像素。如果局部像素值极值形成为一组相邻的图像像素,则属于所述组的图像像素因此分别具有比围绕局部像素值极值的图像像素组并形成统一像素值背景的那些图像像素高得多的像素值。像素值例如可以是灰度值,低灰度值相应于暗图像像素,高灰度值相应于亮(被照射的)图像像素。
[0079]
托盘的对比图像数据组也可以通过暗场照明或暗场拍摄(暗场策略)的方法获得。暗场策略用于例如自动视觉检查。暗场策略使用暗场照明装置和拍摄暗场图像的暗场摄像机。照明以(通常非常小的)角度进行,而拍摄可以以不同的(陡的)角度进行。暗场照明装置发出的大部分光不会反射到暗场摄像机。在所提到的视觉检查中,只有表面中的缺陷散射/反射,而在拍摄带有支承杆的托盘的当前情况下,只有支承杆尖端和延伸到支承杆尖端的边侧将光散射/反射到暗场摄像机。结果产生了大部分暗的暗场图像(在此称为统一像素值背景),只有支承杆尖端和边侧看起来比它们的周围环境亮得多(在此称为局部像素值极值)。这样的暗场图像是托盘的对比图像数据组的另一个示例,其中配置给支承杆尖端的区域被表示为统一像素值背景中的局部像素值极值。
[0080]
将近红外频谱的光用于(暗场)照明还允许在没有外壳的情况下可靠地抑制由于阳光或人工照明引起的外来光效应。在这种情况下,由于阳光引起的外来光效应可以特别通过使用频率范围为845nm至855nm和/或935nm至945nm的近红外光进行照明来抑制,因为这相应于地球表面的阳光光谱中的带隙。在近红外频谱中、特别是在所提到的频谱中,托盘的暗场摄像机图像的拍摄可以特别通过使用相应的光谱滤波器来实现。
[0081]
悬挂位置的确定基于对比图像数据组的分析。在此以示例的方式公开了各种分析方法。
[0082]
模板匹配图像分析是一种基于两阶段方法的用于检测图像数据组中的对象的方法。首先,建立待识别的对象的模板,然后借助相似性度量、例如绝对差值总和来评估图像数据组中模板的出现。模板匹配图像分析在g.cheng和j.han的“a survey on object detection in optical remote sensing images”,isprs journal of photogrammetry and remote sensing,第117卷,第11-28页,2016年中详细描述。
[0083]
可以形成为支承杆的图像数据组的模板在这种情况下可以特别通过在新的(未磨损的或未受熔渣影响的)支承杆的近红外频谱中拍摄摄像机图像或暗场摄像机图像来产生。
[0084]
由于支承杆的表示因透视效应可能根据其沿托盘的纵向范围的悬挂位置而改变,因此可以选择已经悬挂在托盘的纵向范围的内部区域中的支承杆作为模板。这样的模板既可以用于检测悬挂得更“前方”的支承杆,也可以用于检测悬挂得更“后方”的支承杆。
[0085]
平行投影图像分析也是一种用于检测在图像数据组的行或列的特定部分上延伸的对象的方法。特别是在平行投影图像分析中,可以通过图像像素的灰度值逐行地(或逐列地)添加非常容易且快速地识别图像中的支承杆(其主延伸方向沿图像像素线或图像像素行延伸)。支承杆在这种由像素值沿支承杆的投影/求和产生的“信号分布”中形成最大值。平行投影图像分析在例如p.du等的“improved peak detection in mass spectrum by incorporating continuous wavelet transform-based pattern matching”,bioinformatics,第22卷,第17期,第2059
–
2065页,2006年中被描述。
[0086]
对比图像数据组的图像分析的其他方法包括:滑动窗口方法图像分析(参见例如m.barva等的“parallel integral projection transform for straight electrode localization in 3-d ultrasound images”,ieee transactions on ultrasonics,ferroelectrics,and frequency control,第55卷,第7期,第1559
–
1569页,2008年),基于sift算法的图像分析(参见例如d.g.lowe,“object recognition from local scale-invariant features”,ieee international conference on computer vision,第99卷,第2期,1999年,第1150
–
1157页)和基于神经网络的图像分析(参见例如d.erhan等人,“scalable object detection using deep neural networks”,ieee conference on computer vision and pattern recognition,2014年,第2147-2154页和k.he等人,“maskr-cnn”,proceedings of the ieee international conference on computer vision,2017年,第2961
–
2969页)。
[0087]
通常,错误识别可能是由例如支承杆上的强反射边缘
[0088]
或通过切割毛刺引起的。为了随后排除此类错误识别,可以检查检测到的支承杆候选者。例如可以检查配置给支承杆候选者的图像部分的灰度值在支承杆尖端的方向上波动了多少。如果波动高于要固定的阈值,则可以假定错误识别的支承杆候选者并且可以将其排除。以这种方式,在使用平行投影图像分析时可以有利地快速且容易地避免错误识别。
[0089]
下面参考图1描述平板机床的安装。图2在流程图中总结了用于检测悬挂位置的方法的所述步骤。借助图3至图6阐述了借助于经滤波的傅立叶变换生成对比图像数据组。借助图7和图8阐述了通过暗场方法生成对比图像数据组。图9示出了用于图像分析的模板。
[0090]
图1示出了平板机床1,所述平板机床具有托盘3、摄像机5、(由虚线示出的)照明装置7,7'以及评估装置11,所述评估装置包括处理器9并与摄像机5连接。
[0091]
支承杆13可以在托盘3的框架4中沿托盘3的纵向侧3a(所述纵向侧限定纵向范围)悬挂在多个离散的悬挂位置15,悬挂在在此包括任何类型的固定布置和可选的固定。在一些悬挂位置15,在图1的托盘的示例中未悬挂支承杆13。可看到的是,与托盘的远端侧3b相比,支承杆13靠近机床更紧密地安装在一起。
[0092]
支承杆13沿共同的主延伸方向13a(在图1中沿托盘3的端侧3b)延伸,分别以板的形式配置并且具有多个支承杆尖端17。支承杆尖端17形成/限定共用支承平面17a。在主延伸方向13a上,相继的/相邻的支承杆尖端17分别以尖端间距17b彼此分开地布置。通常,对于所有支承杆13,尖端间距17b基本相同。
[0093]
设置用于被平板机床1加工的材料面板(未示出)可以在支承平面17a中安装在支承杆13上。在这种情况下,支承杆尖端17与材料面板接触,使得例如在材料加工期间,激光束也可以与支承杆尖端17相互作用。为了能够考虑支承杆13的位置,例如已经在材料面板中待切割的工件的布置中,优选地期望自动检测支承杆13的位置。
[0094]
为了确保材料面板的正确定位,托盘3具有止动件19,所述止动件布置在框架4上并且在图1中示意性表示。止动件19的设计允许其用作图像处理中的可光学检测的参考结构19a。
[0095]
摄像机5例如通过摄像机臂5'连接到平板机床1的生产壳体。借助于摄像机5,托盘3的二维的特别是单色或彩色的摄像机图像可以在可见光谱或红外光谱中产生(参见图3的图像数据组21),或者托盘3的暗场摄像机图像可以在近红外频谱中产生(参见图7的对比图像数据组23')。相应图像的拍摄是从拍摄方向5a从侧向上方朝向托盘3实施的。由于倾斜的拍摄方向5a,可以实施摄像机图像的光学或数字校正以便于图像处理。图3和图7中所示的图像是相应被校正的摄像机图像。如已经提到的,支承平面17a的这种“被校正的”摄像机图像可以例如通过单应性方法来提供。
[0096]
在这种情况下,也可以参考用于相应的基于图像或基于图像数据组的方向指示的图像数据组21、对比图像数据组(23)和暗场摄像机图像或对比图像数据组(23'),使用成像的支承杆13的(共同的)主延伸方向13a和成像的托盘3的横向于主延伸方向延伸的纵向方向。
[0097]
摄像机图像和暗场摄像机图像具有成行和列地布置的图像像素,分别将支承平面的像素值和通常方形的相同尺寸的像素面积单元配置给所述图像像素。像素值是灰度值,低灰度值相应于暗像素,高灰度值相应于亮像素。对于在此讨论的方面,颜色分辨率不是必需的,这是因为图像分析主要与强度值相关。
[0098]
拍摄方向5a与支承平面17a围成角度5b。在图1中举例给出的情况下,拍摄方向5a垂直于支承杆13的主延伸方向13a延伸。角度5b例如处于10
°
至70
°
的范围内,特别是该角度可以大于45
°
、例如是60
°
。垂直定向关于主延伸方向的偏差例如为大约
±
20
°
。
[0099]
借助于(由虚线示出的)照明装置7,托盘3可以在照射方向7a上可选地借助红外光、例如借助在845nm至855nm和/或935nm至945nm的近红外频谱中的光附加地被照射。照射方向7a与支承平面17a围成角度7b。角度7b例如小于30
°
并且特别是处于10
°
至20
°
的范围内、例如是大约15
°
。照明装置7从“后方”照射支承杆13,即相对于摄像机5照在支承杆13的
后侧。相应地,(垂直于支承平面17a)投影到支承平面17a中的照射方向7a与支承杆13的主延伸方向13a围成角度7c。角度7c例如小于30
°
并且特别是处于10
°
至25
°
的范围内、例如是大约15
°
。
[0100]
其他照射方向可以由其他照明装置提供;例如图1中示出了附加照明装置7'。多个照明装置使支承杆被更均匀地照射。在此必须考虑的是,照明装置不应直接照到摄像机上,以避免摄像机过饱和(“摄像机的眩目”)。此外,摄像机5可以与频率滤波器结合使用,所述频率滤波器传输特定选择的光谱范围。
[0101]
平板机床1设置用于使得用于检测支承杆13的悬挂位置15的方法成为可能。为此图像处理所需的计算可以例如用评估装置11的处理器9来实施。相应地,摄像机5和可选的照明装置7连接到处理器9/评估装置11以用于接收数据(图像数据组)并且用于启用它们(触发图像拍摄或照明)。评估装置11可以形成为pc、计算节点或类似的合适硬件,并且特别是形成为控制单元的一部分,所述控制单元实施平板机床1的启用。因此,评估装置11可以形成为平板机床的高级或本地控制系统的一部分、或者形成为平板机床自身的单元。评估装置11特别设计用于在平板机床1的实时操作期间实施/保持对用于确定悬挂位置的方法的检查。为此目的,用作基础的计算系统具有例如微处理器电路,所述微处理器电路具有带数据输入和控制输出的数字处理器系统、以及还有根据存储在计算机可读介质上的计算机可读指令操作的数据库。所述指令包括例如用于傅立叶变换、滤波和图像分析的计算机例程。评估装置11可以为实时支持提供高计算能力。评估装置还可以提供用于存储程序指令的长期(非易失性)存储器和用于(缓冲)存储获取的数据和在实施所述方法期间产生的数据组的非常快速的短期(易失性)存储器。
[0102]
用于检测支承杆的悬挂位置15的方法涉及托盘3,托盘如上所述沿托盘3的纵向方向装备有多个支承杆13。所述支承杆13中的每个支承杆沿着主延伸方向13a具有多个支承杆尖端17,所述主延伸方向横向于纵向方向定向。支承杆尖端17限定支承平面17a。如图2所示,所述方法包括以下步骤,所述步骤可以至少部分地实现为计算机实施的方法。
[0103]
在步骤100中,建立托盘3的二维对比图像数据组,所述二维对比图像数据组具有多个图像像素。在这种情况下,给每个图像像素配置支承平面17a的像素值和像素面积单元,并且对比图像数据组包括被配置给支承杆尖端17的区域,作为统一像素值背景中的局部像素值极值。
[0104]
在步骤200中,基于局部像素值极值确定对比图像数据组中的配置给多个支承杆13之一的支承杆尖端17的区域的纵向位置。
[0105]
在步骤300中,基于对比图像数据组中的纵向位置和像素面积单元在纵向方向上的大小,推导出支承杆13在托盘3中的悬挂位置15。
[0106]
下面以示例的方式描述了可以建立对比图像数据组的两种方法(参见步骤100)。
[0107]
首先,结合图3至图6阐述了如何借助于傅立叶变换来实施如何建立对比图像数据组23。接着,基于图7和图8阐述了借助于暗场照明和暗场拍摄进行建立。傅立叶变换的优点是灵活地应用和结合到现有的拍摄系统中,这是因为通常可以使用已经可用的图像数据。与这种计算密集型实现方式相比,暗场方法实质上需要独立的摄像机系统,所述系统可选地具有其自身的照明。另一方面,在暗场方法的情况下数据处理被大大简化。在此的方法的共同目标是提供对比图像数据组,在所述对比图像数据组中尽可能突出显示支承杆尖端
17,支承杆尖端在示例中被表示为在其他情况下最黑的可能图像中(或者在围绕恒定像素值的随机像素值分布中)的“尽可能亮的区域”。
[0108]
当托盘固定在机床中或托盘更换器上时,这两种方法从托盘的图像出发。托盘也优选地尽可能完全是空的。起始图像经过透视变换,使得在像素(在图像中竖直或水平)布置成行的方向之一上,支承杆看起来类似于线。起始图像也可以由多个摄像机图像组合在一起。
[0109]
图3示出了托盘在可见光谱中由摄像机5产生的二维摄像机图像21,其中沿着主延伸方向13a具有多个支承杆,所述主延伸方向在图1中相应于y方向。在某种程度上还可看到的是托盘框架的区域,托盘框架的纵向侧3a沿纵向方向(根据图1表示x方向)延伸并且托盘框架的端侧3b沿着主延伸方向13a延伸。
[0110]
摄像机图像21具有多个图像像素,所述图像像素分别配置有灰度值。摄像机图像21是从上方倾斜拍摄的,使得随着支承杆与摄像机5的间距增加,在摄像机图像21中不仅可以看到上边缘,而且也可以越来越多地看到支承杆的面向摄像机的边侧。换句话说,出于透视原因,各个支承杆13在摄像机图像21中被不同地表示,这取决于它们在支承平面17a中的位置,特别是在纵向方向上的悬挂位置:由于相对陡峭的拍摄角度,在摄像机图像21的左侧边缘区域中的支承杆几乎以俯视图呈现并且因此线状地呈现(仅仅感知上侧)。由于相对较浅的拍摄角度,在摄像机图像21的右侧边缘区域中的支承杆以一种倾斜视图显现,从而感知到它们的板状边侧。
[0111]
然而由于摄像机图像21例如借助于上述单应性方法被校正,每个图像像素被配置相同尺寸的支承平面17a的方形像素面积单元,使得摄像机图像21在这方面相应于无失真的俯视图(鸟瞰图),即使是图像内容由于倾斜的拍摄方向而与俯视图偏离亦如此。
[0112]
此外,图1所示的参考结构19a在摄像机图像21中作为参考像素布置19b是明显的。可以借助于图像分析方法(例如模板匹配图像分析,见下文)来识别参考像素布置19b。
[0113]
由于照明情况,支承平面17a可能被不均匀地照射,这表现为支承杆13的某些区域显得比其他区域亮得多。通常,在摄像机图像21中可以看到高结构化的灰度值分布。
[0114]
此外,各个支承杆13可以在磨损、熔渣和表面状态方面处于不同的状态。例如各个支承杆尖端可能(熔融)熔化和/或变形。
[0115]
在图像处理过程中,处理器9将图3的关于空间域的摄像机图像21傅立叶变换成关于频域的变换频率数据组21a。
[0116]
图4以所谓的振幅-频率表示示出变换频率数据组21a,其中单个图像点的亮度表示相应频率的振幅量(绝对值的平方)的度量。频率轴(fx轴和fy轴)表示两个正交分析方向(x方向,y方向)的空间频率。在图4中,两个频率轴fx,fy分别以中心为它们的原点(坐标原点)。
[0117]
由于傅立叶变换的性质和支承杆尖端17和支承杆13相对于彼此的规则周期性布置,在振幅绝对值的平方中可看到具有局部亮度极值(峰值)的明显更亮区域。例如在图4中,“水平”线在fx方向上标记为lx,并且竖直线在fy方向上标记为ly。所述较亮的区域归因于支承杆13的几何形状,特别是支承杆尖端17在主延伸方向13a上的重复结构和/或悬挂位置15在纵向方向上的规律性。
[0118]
考虑到托盘的安装的支承杆的可能几何形状,例如可以实施变换频率数据组21a
的二进制滤波。
[0119]
以尖端间距17b彼此间隔开的支承杆尖端17在摄像机图像21中(在空间域中)形成相应于主延伸方向13a延伸的周期性、规则重复的图案。这可以在变换频率数据组21a中配置尖端重复频率(y方向上的空间频率)。在这种情况下,尖端重复频率在图4中由最接近坐标原点且与坐标原点间距相等的两条水平线ly1表示。尖端重复频率由以下得出:
[0120][0121]
其中,
[0122]
h:在摄像机图像21中表示的支承平面17a在主延伸方向13a上的区域的像素的数量,
[0123]
δx:像素面积单元在主延伸方向13a上的大小,以及
[0124]
d:相邻支承杆尖端17的尖端间距17b。
[0125]
示例性的值是:δx=1mm,例如h=1600个图像像素和d=16mm,从而获得100个图像像素的尖端重复频率。
[0126]
为了突出显示尖端重复频率,变换频率数据组21a可以被滤波,即变换频率数据组21a被限制到频带。经滤波的变换频率数据组例如围绕尖端重复频率的固定频率带宽中扩展。在图4中,示例性地选择了沿线ly1的两个频带。
[0127]
就此而言,发明人还意识到,如果从变换频率数据组21a中去除高频、fx空间频率,所述空间频率的振幅贡献可以忽略(在图4中示出为虚线s1、s2左右两侧的频率),则可以快速且可靠地实施对比度图像数据组中的配置给支承杆尖端的区域的位置的下游确定(图2中的步骤200)。
[0128]
以这种方式滤波和限制的变换频率数据组21a例如通过将剩余频率的振幅贡献设置为零而仅包括例如矩形b中的振幅值。在类似于图4的表示中,矩形b之外的区域相应地用黑色表示。
[0129]
然后处理器9借助于傅立叶逆变换将经滤波的变换频率数据组21a反向变换为空间域。
[0130]
事实上,变换频率数据组21a已被限制围绕尖端重复频率的频带并且因此频带外的所有频率都被抑制(滤波),这意味着关于图像域的对比图像数据组23可以通过经滤波的变换频率数据组21a的接着的反向变换而产生(参见图5)。在对比图像数据组23中,支承杆尖端17被突出显示并且其他“干扰”结构或纹理至少被明显抑制。对比图像数据组23相应地将支承杆尖端17的区域表示为统一像素值背景23b中的局部像素值极值23a。因此获得反向变换的图像数据组,所述反向变换的图像数据组可以作为对比图像数据组23输出以用于进一步的图像分析。
[0131]
图5通过并排示出来自根据图3的托盘的二维摄像机图像21的区段(右侧图)和借助于傅立叶变换从二维摄像机图像产生的对比图像数据组23的区段(左侧图)来示出这种“干扰减少”效应。可以看到多个结构化良好的线性行亮区域,所述区域分别相应于支承杆的支承杆尖端。值得注意的是,在所表示的区段中,所述行彼此等距延伸(即已使用每个悬挂位置)。
[0132]
图6示出了借助于傅立叶变换建立对比图像数据组23的步骤100。作为基础采用的
图像处理包括以下步骤,所述步骤至少可以部分地实现为计算机实现的方法:
[0133]
在步骤110'中,拍摄托盘3的二维摄像机图像21。拍摄过程的一部分是校正,校正以某种方式实施,使得摄像机图像21的被成行和列地布置的图像像素分别被配置支承平面17a的相同像素面积单元。校正可以例如借助评估装置11的处理器9基于初始图像的图像数据来计算或者至少部分地以光学方式实施。
[0134]
在步骤120'中,摄像机图像21被傅立叶变换到频域并且作为变换频率数据组21a输出。
[0135]
在步骤130'中,变换频率数据组21a被滤波以突出显示频域中的属于配置给支承杆尖端17的区域的频率。
[0136]
在步骤140’中,借助于傅立叶逆变换对经滤波的变换频率数据组21a进行傅立叶反向变换,使得被反向变换的图像数据可以作为对比图像数据组23输出。
[0137]
在下面阐述的第二方法中,对比图像数据组是借助于暗场拍摄、可选地使用暗场照明建立的。为此,如图1所示,托盘3可以由一个或多个照明装置7,7'从照射方向7a以近红外频谱的光照射。
[0138]
用于建立托盘3的对比图像数据组的暗场方法(暗场策略)的实施方式可以考虑到托盘3上方的空间应该可用于装载和卸载过程。例如如图1所示,摄像机5可以通过摄像机臂5’附接到平板机床1的后壁。
[0139]
照明装置7然后可以从边侧和上方照射支承杆尖端17,以便将反射且散射后的光向上偏转到摄像机5。此外,照明装置7不应从上方以太陡的角度指向托盘,这是因为位于托盘3下方的其他物体(例如材料边角料)可能被照射并成为图像的一部分。此外,照明装置7不应照射支承杆13的面向摄像机5的边侧。照明装置7可以优选地从上侧和后侧(即从与摄像机5对置的一侧)以小角度侧向照明。照明装置7可以例如定位在距托盘40cm的间距处。对于照明装置7,暗场照明以较小的角度入射到间距照明装置7较远的支承杆尖端13上。
[0140]
还要注意的是,如果光可以直接从照明装置7进入摄像机5,则有时会出现强烈的镜头光晕(“摄像机的眩目”)。如果照明装置7位于托盘3的与摄像机5相对的一侧,则可能是这种情况。为了避免这种情况,照明装置7可以设置有相应的覆盖物。如上所述,为了均匀地照射托盘3的整个支承平面,可以提供多个照明装置7,7'。
[0141]
图7以托盘3的暗场摄像机图像的形式示例性地示出了暗场拍摄的结果,所述暗场摄像机图像借助于摄像机5从拍摄方向5a在近红外频谱中进行拍摄。暗场摄像机图像可以直接(在校正之后)用作对比图像数据组23',用于进一步的图像分析。替换地,也可以根据上面进一步描述的方法,使用傅立叶变换对暗视场摄像机图像进行滤波,并且仅使用滤波后和被反向变换的图像数据组作为对比图像数据组,作为步骤200和300的基础。
[0142]
在所示的示例中,摄像机5已经设置有窄带滤波器,所述窄带滤波器在近红外频谱中具有超过90%的最大透射率。如图7中可看到的是,(基本上)只有支承杆尖端17和延伸到支承杆尖端17的一些边侧可以在对比图像数据组23'中作为图像中的明亮区域看见,图像的其他部分为最大程度的黑色。
[0143]
图8的流程图示出了借助于暗场摄像机图像建立对比图像数据组的步骤100。作为基础采用的图像拍摄包括以下步骤,所述步骤可以至少部分地实施为计算机实施的方法:
[0144]
在步骤105”(可选)中,托盘3从一个或多个照射方向7a以近红外频谱的、特别是在
845nm至855nm和/或935nm至945nm的频谱中的光从上方照射。照射方向7a中的至少一个照射方向可以与支承平面成上面指示的角度7a,7b。
[0145]
在步骤110”中,对比图像数据组23'通过从拍摄方向5a在近红外频谱中产生托盘3的暗场摄像机图像而产生。暗场拍摄可以在与支承平面和主延伸方向成上面指示的角度5a,5b下实施。
[0146]
换言之,在优选实施例中,平板机床可以为用于加工的托盘配备近红外(nir)照明件,并且还配备摄像机,所述摄像机具有窄带滤波器。使用窄带滤波器,可以防止环境光的影响。如果摄像机安装在平板机床的壳体上,并且沿着托盘的纵向范围安装照明件,使得从后面倾斜地照射支承杆,则这产生暗场拍摄,在所述暗场拍摄中尖端和支承杆的边侧被表示为明亮,而图像的其余部分为暗。
[0147]
如果建立了对比图像数据组23,23',则借助于图像分析来确定对比图像数据组23,23'中的配置给支承杆尖端17的区域的位置。这可以例如借助于对比图像数据组23,23'的图像分析的平行投影或通过模板匹配图像分析来进行。同样可以使用其他更复杂的图像分析方法,例如滑动窗口方法图像分析、基于sift算法的图像分析或基于神经网络的图像分析。
[0148]
沿着主延伸方向13a的平行投影的结果在图7中示意性地指示在图像的下边缘处。通过对y方向上的像素值求和(图像的灰度值在主延伸方向13a的方向上逐列地相加),在x方向上、即沿托盘3的纵向范围获得强度分布31。在强度分布中可以看到多个最大值31a。
[0149]
支承杆上的强反射边缘或切割毛刺可能导致错误识别。所述错误识别可以例如通过检查候选者(强度分布31的相应区域)灰度值在主延伸方向13a上波动多少来检测。例如可以沿x轴将候选者周围的x轴区域中(例如在围绕最大值 /-20个图像像素的区域中)的灰度值相加在一起(横向于主延伸方向的平行投影)。替换地或附加地,为了将候选者快速分类为错误识别,可以计算沿y轴的灰度值波动的平均值。如果所述平均值低于先前固定的阈值,则它为错误识别。
[0150]
在图7中,另外示出了支承杆可以等间隔地悬挂。如果悬挂位置15之一与强度分布中的强度最大值重合,则相应的悬挂位置用“1”标记(悬挂位置被装备)。如果在悬挂位置15处没有强度最大值,则所述悬挂位置用“0”标记(没有悬挂支承杆13)。在图7的情况下可以看出,并不是每个悬挂位置15都被使用,即不是每个悬挂位置15都安装了支承杆13。
[0151]
横向于主延伸方向13a的平行投影的类似强度分布限制在支承杆尖端周围的较窄区域(例如 /-4个图像像素),也可以用于识别y方向的各个支承尖端。为此,可以再次确定信号的最大值(灰度值的总和)。
[0152]
这同样在图7中指示。对于支承杆13,进行x方向的平行投影,以便检测支承杆尖端17的准确位置。在图7中已经用几个最大值35a示出了y方向上的相应强度分布35。(最大值31a的)悬挂位置的x位置和强度分布35中的最大值35a之一的y位置用于获得所属的支承杆尖端17的二维位置。基于图7中的x位置和y位置以示例的方式指示支承杆尖端37。通过考虑到支承杆尖端17的位置的待切割工件的计划布置,支承杆尖端17的所述位置可以例如作为切割过程的基础。
[0153]
与暗场摄像机图像相关的平行投影方法可以类似地应用于图像数据组23。
[0154]
图9示出了用于模板匹配图像分析的模板25。模板25示出了具有略微升高的像素
值的区域27,所述区域在模板中属于支承尖端并且可选地属于延伸到支承杆尖端的边侧。通常,可以从多个图像中提取模板。模板25可以例如从具有多个支承杆尖端17的支承杆13的图像数据组获得。例如模板可以从托盘3的内部区域获得,这是因为布置在那里的支承杆13可以被认为是所有支承杆13的平均值。模板25也可以借助于傅立叶正向变换和傅立叶反向变换、可选地通过相应的滤波来建立。
[0155]
还如图9所示,例如可以关于区域27不对称地使用模板,以便考虑现有的结构信息并防止将“杆凹陷”错误检测为“杆尖端”。“杆尖端”尤其是在初始图像中侧向看到支承杆时的情况,即不形成线。然后可以选择不对称模板,使得在检测到的信号旁边需要没有傅立叶带通滤波器响应的区域。在杆凹陷的情况下,尖端将在那里可见,使得只有支承杆尖端产生与模板25的高度重合。
[0156]
在模板匹配图像分析中,确定对比图像数据组23,23'中的配置给支承杆尖端17的区域的位置包括使用模板25关于尺寸相当的对比图像数据组23,23'的部分实施匹配操作。导致与对比图像数据组23,23'高度重合的模板的x位置主要是作为使用模板25进行位置确定的结果获得的。然后所述位置相应于支承杆13的悬挂位置15。根据模板的质量以及模板25和对比图像数据组23,23'的对比度,还可以检测支承杆尖端17沿着主延伸方向13a的相应位置。
[0157]
同样在模板匹配图像分析中,对比图像数据组23,23'配置给托盘3中可能的悬挂位置15的实际位置也可以被包括而用于悬挂位置15的确定,如已经结合图7关于悬挂位置15所阐述的。
[0158]
换句话说,如果根据局部像素值极值23a确定了对比图像数据组23,23'中的配置给支承杆尖端17的区域的位置(步骤200),则根据对比图像数据组23,23'中的配置给支承杆尖端17的区域的位置和像素面积单元可以推导出支承杆13在托盘3中的相应的悬挂位置15(步骤300)。
[0159]
例如这可以通过首先在对比图像数据组23中确定参考像素布置19b(参见图3)与横向于主延伸方向13a配置给支承杆13的支承杆尖端17的区域的x位置之间的图像像素的数量来针对支承杆13实施。然后借助于配置给图像像素的像素面积单元的已知范围(例如1mm x 1mm),根据已确定的图像像素的数量来确定被配置给参考像素布置19b的参考结构19a与相关的支承杆13之间的相应间距。基于已求得的(参考结构19a与相关的支承杆13之间的)间距以及参考结构19a与(离散的)可能的悬挂位置15之间的已知的间距,可以给相关的支承杆13配置悬挂位置15,并且由此可以确定支承杆13在托盘3中的悬挂位置15。
[0160]
如果对以示例方式呈现的用于产生对比图像数据组的两种方法进行比较,暗场方法具有不依赖于有利环境光的优点。另一个优点是托盘3下方的地面和支承杆13的前侧不被照射。这使得图像中的干扰更少。相应地,暗场拍摄使得对支承杆是否已经放置在悬挂位置15的评估更加稳健。几乎不会发生任何错误分类。暗场拍摄还可以以可接受的错误率评估各个图像上的各个支承杆尖端17的位置。此外,通过暗场方法和傅立叶方法实施所述方法是快速的,这是因为暗场/傅立叶分析的拍摄可以在几分之一秒内完成。
[0161]
在傅立叶图像分析的情况下,可以直接从初始图像中提取托盘的当前支承杆占用,而无需任何其他辅助,例如特定的暗场照明。同样在这种情况下,与扫描方法的情况不同,几乎没有任何时间损失,这是因为如前所述,托盘在放置新金属板材之前不久是空的。
傅立叶图像分析在实施方式中所需要的只是用于计算所描述的变换的合适数据处理环境。计算可以在机床的控制器上进行,或者可以外包给外部服务器。已经达到96%及以上的准确度。
[0162]
明确强调的是,说明书和/或权利要求中所公开的所有特征应该被认为是彼此分开的和独立的,以用于原始公开内容的目的,并且同样用于独立于实施例和/或权利要求中的特征组合来限制要求保护的发明的目的。明确指出,所有范围指示或单元组指示公开了任何可能的中间值或单元子组,以用于原始公开内容的目的,同样用于限制要求保护的发明的目的,特别是也作为范围参数的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。