技术特征:
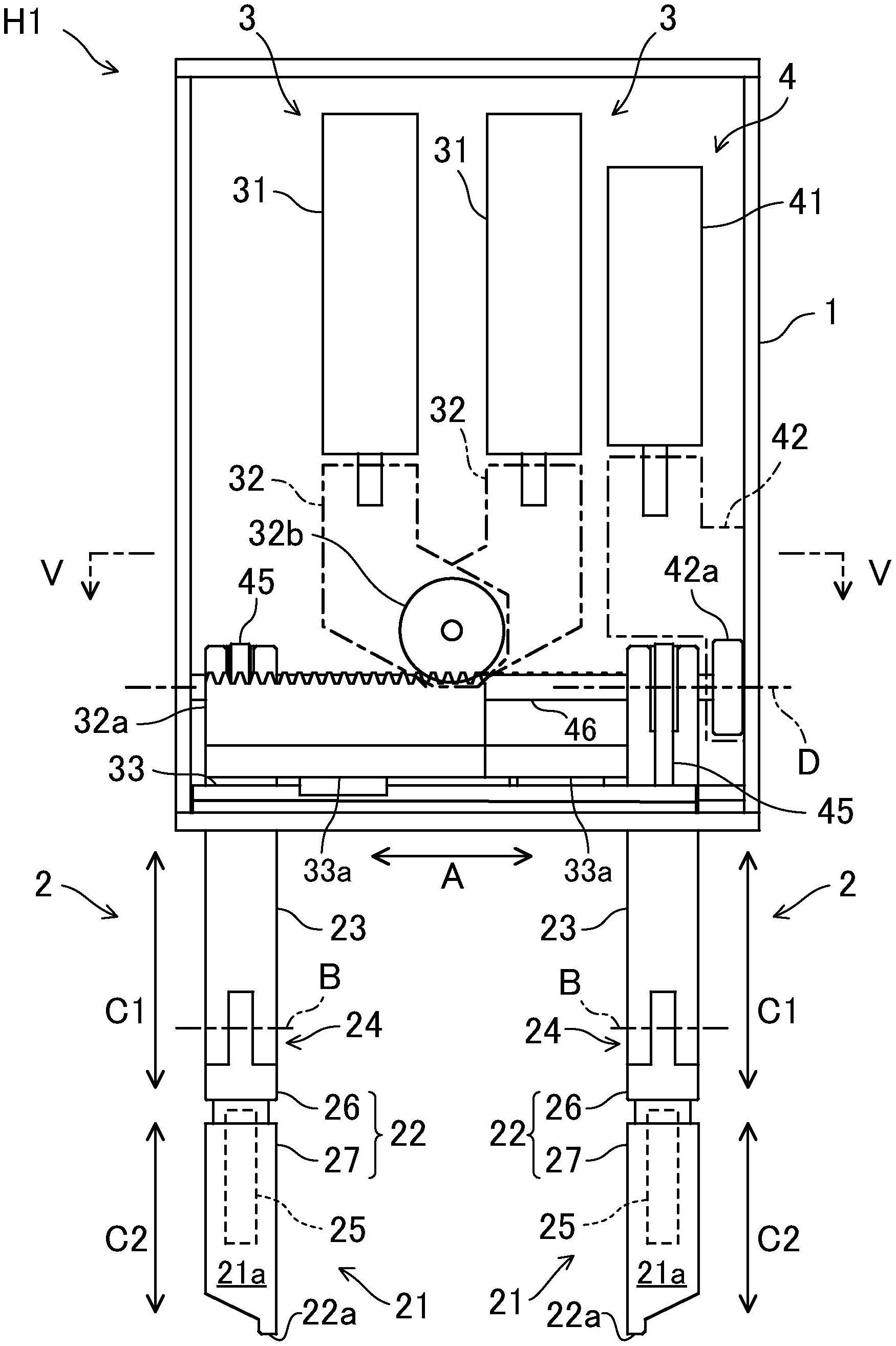
1.一种手,其特征在于:所述手包括基座、两个手指、开闭机构和弯曲机构,所述两个手指从所述基座延伸且构成为可弯曲,所述开闭机构设置在所述基座,使所述两个手指向规定的开闭方向移动,以使所述两个手指握持工件,所述弯曲机构设置在所述基座,使所述两个手指弯曲,所述每个手指构成为具有第二部分和第一部分,所述第二部分从所述基座延伸,所述第一部分围绕与所述开闭方向平行的旋转轴可旋转地连接在所述第二部分,所述第一部分相对于所述第二部分弯曲,在所述第一部分设置有缓冲机构,所述缓冲机构使所述第一部分向所述第一部分的延伸方向弹性伸缩。2.根据权利要求1所述的手,其特征在于:所述开闭机构构成为在所述开闭方向使所述两个手指相互独立移动。3.根据权利要求1所述的手,其特征在于:所述弯曲机构使握持有工件的状态的所述两个手指弯曲,且使所述工件移动到所述工件的规定的移交位置。4.根据权利要求1到权利要求3中任意一项所述的手,其特征在于:所述第一部分具有固定部分和可动部分,所述固定部分可旋转地连接在所述第二部分,所述可动部分经由所述缓冲机构连接在所述固定部分,通过向所述延伸方向移动来使所述第一部分伸缩,所述缓冲机构具有引导部件和弹性部件,所述引导部件具有滚动体,所述滚动体通过滚动将所述可动部分向所述延伸方向引导,所述弹性部件弹性按压所述可动部分。5.一种机器人,其特征在于:所述机器人包括权利要求1到权利要求4中任意一项所述的手和连接有所述手的机器人臂。6.一种机器人系统,其特征在于:所述机器人系统包括权利要求1到权利要求4中任意一项所述的手和控制部,所述控制部控制所述手,所述控制部执行推按动作、卡止动作和移动动作,在所述推按动作中,将所述第一部分的前端推按到工件的表面,以使所述第一部分缩回,在所述卡止动作中,沿着所述表面使因所述推按动作而处于缩回状态的所述第一部分的前端滑动,以使所述第一部分卡止在形成在所述工件的、凹于所述表面的卡止部,在所述移动动作中,通过使因所述卡止动作而处于卡止状态的所述第一部分移动,来使所述工件移动。7.一种机器人系统,其特征在于:所述机器人系统包括手指、手和控制部,所述手具有缓冲机构,所述缓冲机构使所述手指向所述手指的延伸方向弹性伸缩,所述控制部控制所述手,所述控制部执行推按动作、卡止动作和移动动作,在所述推按动作中,将所述手指的前端推按到工件的表面,以使所述手指缩回,在所述卡止动作中,沿着所述表面使因所述推按动作而处于缩回状态的所述手指的前端滑动,以使所述手指卡止在形成在所述工件的、凹于所述表面的卡止部,在所述移动动作中,通过使因所述卡止动作而处于卡止状态的所述手指移动,来使所述工件移动。
8.一种手的控制方法,是权利要求1到权利要求4中任意一项所述的手的控制方法,其特征在于:所述手的控制方法包括将所述第一部分的前端推按到工件的表面,以分的前端滑动来使所述第一部分卡止在形成在所述工件的、凹于所述表面的卡止部的步骤和通过使卡止在所述卡止部的状态的所述第一部分移动来使所述工件移动的步骤。
技术总结
本发明提供一种手。手(100)包括基座(1)、两个第一手指(21)、开闭机构(3)和弯曲机构(4),所述两个第一手指(21)从基座(1)延伸且构成为可弯曲,所述开闭机构(3)设置在基座(1),使两个第一手指(21)向规定的开闭方向A移动,以使两个第一手指(21)握持工件,所述弯曲机构(4)设置在基座(1),使两个第一手指(21)弯曲。每个第一手指(21)构成为具有第二部分(23)和第一部分(22),所述第二部分(23)从基座(1)延伸,所述第一部分(22)围绕与开闭方向A平行的旋转轴B可旋转地连接在第二部分(23),第一部分(22)相对于第二部分(23)弯曲。在第一部分(22)设置有使第一部分(22)向第一部分(22)的延伸方向C2弹性伸缩的缓冲机构(25)。延伸方向C2弹性伸缩的缓冲机构(25)。延伸方向C2弹性伸缩的缓冲机构(25)。
技术研发人员:村濑阳平 松浦刚 尾立圭巳 和田寿夫 福田裕章
受保护的技术使用者:川崎重工业株式会社
技术研发日:2021.10.05
技术公布日:2023/7/4
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。