1.本技术涉及换盘机构,具体涉及一种自动分穴摆盘换盘装置。
背景技术:
2.在手机零配件组装过程中,经常需要取放物料和摆盘操作。目前采用的人工操作的方式难以满足大规模的生产,同时人工取放料对于产品的外观伤害较大,引起产品的不良而造成浪费。
技术实现要素:
3.为了克服上述缺陷,本技术提供一种自动分穴摆盘换盘装置,该装置能够自动完成了自动上空料盘、产品自动摆盘以及满料盘自动收集的整个过程,提高了产品转盘的工作效率以及产品的良率。
4.本技术为了解决其技术问题所采用的技术方案是:
5.一种自动分穴摆盘换盘装置,包括机架,所述机架上设有自动出空盘机构、空盘移动机构、自动堆盘机构、分穴摆盘机构和分间距传送机构,所述自动出空盘机构包括第一输送单元和第一夹紧单元,所述自动堆盘机构包括第三夹紧单元和第二输送单元,所述第一输送单元用于将料盘运送至第一夹紧单元处,所述第一夹紧单元用于将料盘夹紧,所述空盘移动机构用于将所述第一夹紧单元上的料盘搬运至所述第三夹紧单元处,所述第三夹紧单元用于将料盘夹紧,所述分间距传送机构用于输送载具中的产品,所述分穴摆盘机构用于将载具中的产品搬运至第三夹紧单元处的料盘内,所述第二输送单元用于收集所述第三夹紧单元处的料盘。
6.优选地,所述自动出空盘机构还包括第一支撑架,所述第一支撑架上固定设有第一支撑台和第二支撑台,所述第二支撑台位于所述第一支撑台的上方,所述第一输送单元安装于所述第一支撑台上,且所述第一输送单元能够将所述第一支撑台处的料盘输送至所述第二支撑台,所述第一夹紧单元安装于所述第二支撑台上,且所述第一夹紧单元能够将所述第二支撑台处的料盘夹紧。
7.优选地,所述第一输送单元包括第一丝杆升降模组、第一滑动平台和第一托板,所述第一丝杆升降模组竖直地安装于所述第一支撑台上,所述第一托板固定连接于所述第一滑动平台上,所述第一滑动平台连接于所述第一丝杆升降模组上,且所述第一丝杆升降模组能够驱动第一滑动平台进行上下运行,所述第一夹紧单元包括第一夹紧气缸和第一夹紧板,所述第一夹紧气缸水平地安装于所述第二支撑台上,所述第一夹紧板固定连接于所述第一夹紧气缸的活塞杆上。
8.优选地,所述空盘移动机构包括第二支撑架、第三支撑架、第一竖直驱动单元、第二竖直驱动单元、第一水平驱动单元、第一旋转单元和第二夹紧单元,所述第一水平驱动单元和第二夹紧单元安装于所述第二支撑架上,所述第一水平驱动单元连接于所述第三支撑架,且所述第一水平驱动单元能够驱动所述第三支撑架进行水平方向的运动,所述第一竖
直驱动单元、第二竖直驱动单元和所述第一旋转单元安装于所述第三支撑架上,所述第一竖直驱动单元用于将所述第一夹紧单元上的料盘搬运至第二夹紧单元处,所述第二夹紧单元用于将料盘夹紧,所述第一旋转单元用于将第二夹紧单元上的料盘旋转,所述第二竖直驱动单元用于将第二夹紧单元上的料盘搬运至所述第三夹紧单元处。
9.优选地,所述第二支撑架上固定设有第一滑轨,所述第三支撑架滑动地安装于所述第一滑轨上,所述第一水平驱动单元包括第一水平气缸,所述第一水平气缸连接于所述第三支撑架上,且所述第一水平气缸能顾驱动所述第三支撑架沿着所述第一滑轨进行水平滑动,所述第一竖直驱动单元包括第一竖直气缸、第一吸嘴架和第一吸嘴,所述第一吸嘴架连接于所述第一竖直气缸的活塞杆,所述第一吸嘴架上固定设有所述第一吸嘴,所述第二竖直驱动单元包括第二竖直气缸、第二吸嘴架和第二吸嘴,所述第二吸嘴架连接于所述第二竖直气缸的活塞杆,所述第二吸嘴架上固定设有所述第二吸嘴,所述第一旋转单元包括第一旋转电机、第一转动架和第三吸嘴,所述第一转动架连接于所述第一旋转电机的转轴,所述第三吸嘴固定安装于所述第一转动架上,所述第二夹紧单元包括第二夹紧气缸和第二夹紧板,所述第二夹紧气缸水平地安装于所述第二支撑架上,所述第二夹紧板固定连接于所述第二夹紧气缸的活塞杆上。
10.优选地,所述自动堆盘机构还包括第四支撑架,所述的第三夹紧单元水平地安装于所述第四支撑架,所述第二输送单元竖直安装于所述第四支撑架上,且所述第二输送单元能够沿着所述第四支撑架进行上下运动。
11.优选地,所述第三夹紧单元包括第三夹紧气缸和第三夹紧板,所述第三夹紧气缸水平地安装于所述第四支撑架上,所述第三夹紧板固定连接于所述第三夹紧气缸的活塞杆上,所述第二输送单元包括第二丝杆升降模组、第二滑动平台和第二托板,所述第四支撑架上设有竖直布置的第二滑轨,所述第二滑动平台滑动地安装于所述第二滑轨上,所述第二托板固定连接于所述第二滑动平台,所述第二丝杆升降模组连接于所述第二滑动平台且所述第二丝杆升降模组能够驱动所述第二滑动平台沿所述第二滑轨进行上下滑动。
12.优选地,所述分间距传送机构包括第六支撑架、第二水平驱动单元和第三水平驱动单元,所述第二水平驱动单元安装于所述第六支撑架上,所述第三水平驱动单元连接于所述第二水平驱动单元,且所述第二水平驱动单元能够驱动所述第三水平驱动单元进行水平方向的运动,所述第三水平驱动单元上连接所述载具,且所述载具在所述第三水平驱动单元的作用下能够进行水平方向的运动。
13.优选地,所述第六支撑架上设有第三滑轨,所述第二水平驱动单元包括第二水平气缸以及连接于所述第二水平气缸的支撑板,所述支撑板滑动地安装于所述第三滑轨上,所述支撑板上设有第四滑轨,所述载具滑动地安装于所述第四滑轨上,所述第三水平驱动单元包括第三水平气缸,所述载具连接于所述第三水平气缸的活塞杆上。
14.优选地,所述分穴摆盘机构包括第五支撑架,所述第五支撑架固定于所述机架上,所述第五支撑架上设有x轴直线模组,所述x轴直线模组上设有y轴直线模组,且所述x轴直线模组能够驱动所述y轴直线模组进行x轴方向的运动,所述y轴直线模组上设有z轴直线模组,且所述y轴直线模组能够驱动所述z轴直线模组进行y轴方向的运行,所述z轴直线模组上设有第二旋转单元,且所述z轴直线模组能够驱动所述第二旋转单元进行上下z轴方向的运动,所述第二旋转单元包括第二旋转电机,所述第二旋转电机上设有第二转动架,所述第
二转动架上设有用于吸取产品的第四吸嘴。
15.本技术的有益效果是:
16.1)本技术包括自动出空盘机构、空盘移动机构、自动堆盘机构、分穴摆盘机构和分间距传送机构,所述自动出空盘机构用于空的料盘依次地输送至第一夹紧单元处,所述空盘移动机构用于将第一夹紧单元处的料盘搬运至自动堆盘机构上的第三夹紧单元处,同时空盘移动机构中还设有第一旋转单元用于旋转料盘至要求的角度,因此利用自动出空盘机构和空盘移动机构之间的相互配合可以将空的料盘搬运至预设的位置用于装料;
17.2)所述分间距传送机构能够将载具中的产品运送至上料位,所述分穴摆盘机构能够将上料位的产品搬运至第三夹紧单元处的料盘中,因此利用分间距传送机构和分穴摆盘机构之间的相互配合能够完成产品的自动摆盘操作;所述自动堆盘机构中的第二输送单元用于承接装满产品的料盘即完成满料盘的自动收集操作。因此本装置能够自动完成了自动上空料盘、产品自动摆盘以及满料盘自动收集的整个过程,提高了产品转盘的工作效率以及产品的良率。
附图说明
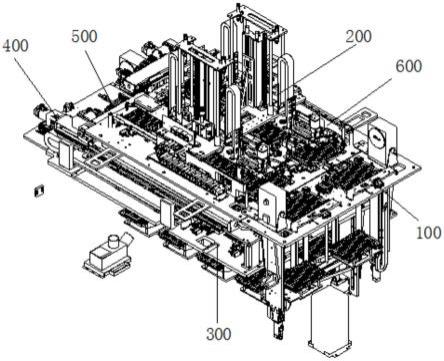
18.图1为本技术中自动分穴摆盘换盘装置的结构示意图;
19.图2为本技术中自动分穴摆盘换盘装置的俯视图;
20.图3为本技术中自动出空盘机构的结构示意图;
21.图4为本技术中空盘移动机构的结构示意图;
22.图5为本技术中空盘移动机构的俯视图;
23.图6为本技术中空盘移动机构的侧视图;
24.图7为本技术中自动堆盘机构的结构示意图;
25.图8为图7中b处的放大图;
26.图9为本技术中分穴摆盘机构的结构示意图;
27.图10为本技术中分穴摆盘机构的主视图;
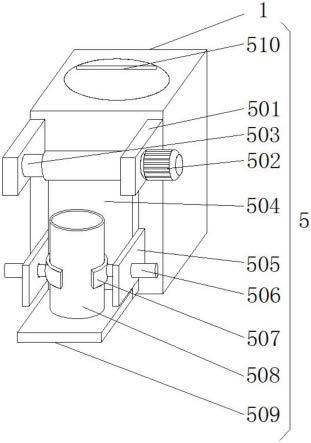
28.图11为本技术中分间距传送机构的结构示意图;
29.图12为本技术中分间距传送机构的俯视图;
30.图中:100-自动出空盘机构,101-第一支撑架,102-第一支撑台,103-第二支撑台,110-第一输送单元,111-第一丝杆升降模组,112-第一滑动平台,113-第一托板,120-第一夹紧单元,121-第一夹紧气缸,122-第一夹紧板,
31.200-空盘移动机构,201-第二支撑架,202-第三支撑架,203-第一滑轨,210-第一竖直驱动单元,211-第一竖直气缸,212-第一吸嘴架,213-第一吸嘴,220-第二竖直驱动单元,221-第二竖直气缸,222-第二吸嘴架,223-第二吸嘴,230-第一水平驱动单元,240-第一旋转单元,241-第一旋转电机,242-第一转动架,243-第三吸嘴,250-第二夹紧单元,251-第二夹紧气缸,252-第二夹紧板,
32.300-自动堆盘机构,301-第四支撑架,310-第三夹紧单元,311-第三夹紧气缸,312-第三夹紧板,320-第二输送单元,321-第二丝杆升降模组,322-第二滑动平台,323-第二托板,324-第二滑轨,
33.400-分穴摆盘机构,401-第五支撑架,410-x轴直线模组,420-y轴直线模组,430-z
轴直线模组,440-第二旋转单元,441-第二旋转电机,442-第二转动架,443-第四吸嘴,
34.500-分间距传送机构,501-第六支撑架,510-第二水平驱动单元,511-第二水平气缸,512-支撑板,513-第三滑轨,520-第二水平驱动单元,521-第三水平气缸,522-载具,523-第四滑轨,
35.600-机架,601-料盘。
具体实施方式
36.下面将结合本技术实施例,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.需要说明的是,本技术的说明书和权利要求书及下述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的对象在适当情况下可以互换,以使这里描述的本技术的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤或单元。
38.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
39.实施例:如图1-12所示,一种自动分穴摆盘换盘装置,包括机架600,所述机架600上设有自动出空盘机构100、空盘移动机构200、自动堆盘机构300、分穴摆盘机构400和分间距传送机构500,所述自动出空盘机构100包括第一输送单元110和第一夹紧单元120,所述自动堆盘机构300包括第三夹紧单元310和第二输送单元320,所述第一输送单元110用于将料盘601运送至第一夹紧单元120处,所述第一夹紧单元120用于将料盘夹紧,所述空盘移动机构200用于将所述第一夹紧单元120上的料盘601搬运至所述第三夹紧单元310处,所述第三夹紧单元310用于将料盘601夹紧,所述分间距传送机构500用于输送载具522中的产品,所述分穴摆盘机构400用于将载具422中的产品搬运至第三夹紧单元310处的料盘601内,所述第二输送单元320用于收集所述第三夹紧单元310处的料盘。
40.如图1和图2所示,空盘移动机构200位于自动出空盘机构100的左侧,自动堆盘机构300、分穴摆盘机构400和分间距传送机构500位于空盘移动机构200的下方,当操作人员将一叠空的料盘放置于第一输送单元110后,第一输送单元110将最上层的料盘601运送至第一夹紧单元120处,第一夹紧单元120夹紧空的料盘601,空盘移动机构200移动至料盘处,
并将第一夹紧单元120处的料盘601搬运至第三夹紧单元310处,第三夹紧单元310将料盘601夹紧,第一输送单元110再将下面的料盘601运送至第一夹紧单元120,依次类推,直至一叠空的料盘用完,操作人员再次摆放一叠空的料盘;与此同时,外部机构将产品运送至分间距传送机构500上的载具522中,分间距传送机构500将载具522中的产品输送至图12中的上料位a处,分穴摆盘机构400将上料位处载具中的产品分批搬运至第三夹紧单元310处的料盘601中,重复运料动作,直至将料盘中装满产品,第二输送单元320运行至料盘601处,并将装满产品的料盘601收集,直至第二输送单元320上料盘的存储量达到最大,操作人员将一叠装满产品的料盘601取走。因此,本技术中利用自动出空盘机构、空盘移动机构、自动堆盘机构、分穴摆盘机构和分间距传送机构之间的配置,自动完成了自动上空料盘、产品自动摆盘以及满料盘自动收集的整个过程,提高了产品转盘的工作效率以及产品的良率。
41.如图3所示,所述自动出空盘机构100还包括第一支撑架101,所述第一支撑架101上固定设有第一支撑台102和第二支撑台103,所述第二支撑台103位于所述第一支撑台102的上方,所述第一输送单元110安装于所述第一支撑台102上,且所述第一输送单元110能够将所述第一支撑台102处的料盘601输送至所述第二支撑台103,所述第一夹紧单元120安装于所述第二支撑台103上,且所述第一夹紧单元130能够将所述第二支撑台103处的料盘601夹紧。
42.如图3所示,所述第一输送单元110包括第一丝杆升降模组111、第一滑动平台112和第一托板113,所述第一丝杆升降模组111竖直地安装于所述第一支撑台102上,所述第一托板113固定连接于所述第一滑动平台112上,所述第一滑动平台112连接于所述第一丝杆升降模组111上,且所述第一丝杆升降模组111能够驱动第一滑动平台112进行上下运行,所述第一夹紧单元120包括第一夹紧气缸121和第一夹紧板122,所述第一夹紧气缸121水平地安装于所述第二支撑台103上,所述第一夹紧板122固定连接于所述第一夹紧气缸121的活塞杆上。第一托板113托住一叠空的料盘601后,第一丝杆升降模组111驱动第一滑动平台112向上运动至第二支撑台103处后,第一夹紧气缸121驱动第一夹紧板122向内运行而将最上层的料盘601夹紧,待最上层的料盘601被空盘移动机构200吸取后,第一夹紧气缸121驱动第一夹紧板122向外运行而松开料盘,料盘被空盘移动机构200运走后,第一丝杠升降模组111再驱动第一滑动平台112向上上升一格,而将下一料盘升至第二支撑台103而被第一夹紧板122夹紧备用。第一丝杆升降模组111包括电机、丝杆和丝杆螺母,丝杆安装于电机上,丝杆螺母安装于丝杆上,第一滑动平台112固定安装于丝杆螺母上,当电机带动丝杆转动时,丝杆驱动丝杆螺母上升或下降,而带动第一滑动平台和第一托板同步运行。
43.如图4-6所示,所述空盘移动机构200包括第二支撑架201、第三支撑架202、第一竖直驱动单元210、第二竖直驱动单元220、第一水平驱动单元230、第一旋转单元240和第二夹紧单元250,所述第一水平驱动单元230和第二夹紧单元250安装于所述第二支撑架201上,所述第一水平驱动单元230连接于所述第三支撑架202,且所述第一水平驱动单元230能够驱动所述第三支撑架202进行水平方向的运动,所述第一竖直驱动单元210、第二竖直驱动单元220和所述第一旋转单元240安装于所述第三支撑架202上,所述第一竖直驱动单元210用于将所述第一夹紧单元120上的料盘601搬运至第二夹紧单元250处,所述第二夹紧单元250用于将料盘601夹紧,所述第一旋转单元240用于将第二夹紧单元250上的料盘601旋转,所述第二竖直驱动单元220用于将第二夹紧单元250上的料盘601搬运至所述第三夹紧单元
310处。
44.如图4所示,所述第二支撑架201上固定设有第一滑轨203,所述第三支撑架202滑动地安装于所述第一滑轨203上,所述第一水平驱动单元230包括第一水平气缸,所述第一水平气缸连接于所述第三支撑架202上,且所述第一水平气缸能顾驱动所述第三支撑架202沿着所述第一滑轨203进行水平滑动,所述第一竖直驱动单元210包括第一竖直气缸211、第一吸嘴架212和第一吸嘴213,所述第一吸嘴架212连接于所述第一竖直气缸211的活塞杆,所述第一吸嘴架212上固定设有所述第一吸嘴213。
45.如图6所示,所述第二竖直驱动单元220包括第二竖直气缸221、第二吸嘴架222和第二吸嘴223,所述第二吸嘴架222连接于所述第二竖直气缸221的活塞杆,所述第二吸嘴架222上固定设有所述第二吸嘴223,所述第一旋转单元240包括第一旋转电机241、第一转动架242和第三吸嘴243,所述第一转动架242连接于所述第一旋转电机241的转轴,所述第三吸嘴243固定安装于所述第一转动架242上。
46.如图5所示,所述第二夹紧单元250包括第二夹紧气缸251和第二夹紧板252,所述第二夹紧气缸251水平地安装于所述第二支撑架201上,所述第二夹紧板252固定连接于所述第二夹紧气缸251的活塞杆上。如图4所示,第一水平气缸水平地安装于第二支撑架201,第三支撑架202连接于第一水平气缸的活塞杆,且第三支撑架202滑动地安装于第一滑轨203上,因此第一水平气缸能够驱动第三支撑架202在第一夹紧单元120和第二夹紧单元250之间运行,第一竖直气缸211和第二竖直气缸221和第一旋转电机241安装于第三支撑架202上,操作时,第一水平气缸驱动第三支撑架202向右侧运行,使第一竖直驱动单元210运行至第一夹紧单元130的正上方,第一竖直气缸211驱动第一吸嘴213运行至第一夹紧单元的料盘601上,第一吸嘴213吸住料盘并在第一水平气缸的作用下将料盘601搬运至第二夹紧单元250,第二夹紧气缸251驱动第二夹紧板252夹紧料盘,第一吸嘴213放开料盘,如需要将料盘掉转方向,第三吸嘴243在第一水平气缸的驱动下运行至料盘处并将料盘吸住,第一旋转电机241转动料盘使得料盘运行至所需的方向,第三吸嘴243再次将料盘放置于第二夹紧单元250,第二竖直气缸221驱动第二吸嘴223运行至料盘处并将料盘吸住后,驱动料盘至下方的第三夹紧单元310。
47.如图7和图8所示,所述自动堆盘机构300还包括第四支撑架301,所述的第三夹紧单元310水平地安装于所述第四支撑架301,所述第二输送单元320竖直安装于所述第四支撑架301上,且所述第二输送单元320能够沿着所述第四支撑架301进行上下运动。
48.如图8所示,所述第三夹紧单元310包括第三夹紧气缸311和第三夹紧板312,所述第三夹紧气缸311水平地安装于所述第四支撑架301上,所述第三夹紧板312固定连接于所述第三夹紧气缸311的活塞杆上,如图7所示,所述第二输送单元320包括第二丝杆升降模组321、第二滑动平台322和第二托板323,所述第四支撑架301上设有竖直布置的第二滑轨324,所述第二滑动平台322滑动地安装于所述第二滑轨324上,所述第二托板323固定连接于所述第二滑动平台322,所述第二丝杆升降模组321连接于所述第二滑动平台322且所述第二丝杆升降模组321能够驱动所述第二滑动平台322沿所述第二滑轨324进行上下滑动。
49.当空盘移动机构200将料盘601输送至第三夹紧单元310处时,所述第三夹紧气缸311驱动第三夹紧板312向内运动而将料盘601夹紧,当料盘中装满物料后,第二丝杆升降模组321驱动第二托板323运行至料盘的下方,且第二托板323托住料盘,第三夹紧气缸311驱
动第三夹紧板312向外运动而将料盘601松开,料盘堆叠在第二托板323上,第二托板在第二丝杆升降模组321的驱动下复位;第二丝杆升降模组321包括电机、丝杆和丝杆螺母,丝杆安装于电机上,丝杆螺母安装于丝杆上,第二滑动平台322固定安装于丝杆螺母上,当电机带动丝杆转动时,丝杆驱动丝杆螺母上升或下降,而带动第二滑动平台和第二托板同步运行。
50.如图11和图12所示,所述分间距传送机构500包括第六支撑架501、第二水平驱动单元510和第三水平驱动单元520,所述第二水平驱动单元510安装于所述第六支撑架501上,所述第三水平驱动单元520连接于所述第二水平驱动单元510,且所述第二水平驱动单元510能够驱动所述第三水平驱动单元520进行水平方向的运动,所述第三水平驱动单元520上连接所述载具522,且所述载具522在所述第三水平驱动单元520的作用下能够进行水平方向的运动。
51.所述第六支撑架501上设有第三滑轨513,所述第二水平驱动单元510包括第二水平气缸511以及连接于所述第二水平气缸511的支撑板512,所述支撑板512滑动地安装于所述第三滑轨513上,所述支撑板512上设有第四滑轨523,所述载具522滑动地安装于所述第四滑轨523上,所述第三水平驱动单元520包括第三水平气缸521,所述载具522连接于所述第三水平气缸521的活塞杆上。第三滑轨513与第四滑轨523布置的方向相互垂直,图12中第三滑轨513沿左右方向布置,第四滑轨523沿前后方向布置,外部设备将产品抓取于载具522中,载具522中的产品分成两组,每组中四个产品,两组产品分开搬运从而实现两组产品之间分间距传送,第二水平气缸511驱动支撑板512运行至最右侧后,第三水平气缸521再驱动载具522运行至最后侧即图12中的上料位a处,等待分穴摆盘机构400来吸取产品。
52.如图9和图10所示,所述分穴摆盘机构400包括第五支撑架401,所述第五支撑架401固定于所述机架600上,所述第五支撑架401上设有x轴直线模组410,所述x轴直线模组410上设有y轴直线模组420,且所述x轴直线模组410能够驱动所述y轴直线模组420进行x轴方向的运动,所述y轴直线模组420上设有z轴直线模组430,且所述y轴直线模组420能够驱动所述z轴直线模组430进行y轴方向的运行,所述z轴直线模组430上设有第二旋转单元440,且所述z轴直线模组430能够驱动所述第二旋转单元440进行上下z轴方向的运动,所述第二旋转单元440包括第二旋转电机441,所述第二旋转电机441上设有第二转动架442,所述第二转动架442上设有用于吸取产品的第四吸嘴443。将x轴直线模组410布置的方向即图9中的前后方向定义为x轴方向,将y轴直线模组420布置的方向即图9中的左右方向定义为y轴方向,z轴方向为上下方向,第四吸嘴443在x轴直线模组410、y轴直线模组420、z轴直线模组430和第二旋转电机441的作用下可实现四轴运动,而将分间距传送机构500中的产品搬运至料盘601上,而实现分穴摆盘操作。
53.本技术的操作过程:包括如下步骤:
54.步骤1:操作人员将一叠空的料盘601放置于第一托板113上,第一丝杆升降模组111驱动第一滑动平台112向上运动至第二支撑台103处后,第一夹紧气缸121驱动第一夹紧板122向内运行而将最上层的料盘601夹紧;
55.步骤2:第一水平气缸驱动第三支撑架202向右侧运行,使第一竖直驱动单元210运行至第一夹紧单元130的正上方,第一竖直气缸211驱动第一吸嘴213运行至第一夹紧单元的料盘601上,第一吸嘴213吸住料盘并在第一水平气缸的作用下将料盘601搬运至第二夹紧单元250,第二夹紧气缸251驱动第二夹紧板252夹紧料盘;
56.步骤3:第一吸嘴213放开料盘,如需要将料盘掉转方向,第三吸嘴243在第一水平气缸的驱动下运行至料盘处并将料盘吸住,第一旋转电机241转动料盘使得料盘运行至所需的方向,第三吸嘴243再次将料盘放置于第二夹紧单元250,第二竖直气缸221驱动第二吸嘴223运行至料盘处并将料盘吸住后,驱动料盘至下方的第三夹紧单元310;
57.步骤4:外部设备将产品抓取于载具522中,载具522中的产品分成两组,每组中四个产品,两组产品分开搬运从而实现两组产品之间分间距传送,第二水平气缸511驱动支撑板512运行至最右侧后,第三水平气缸521再驱动载具522运行至最后侧即图12中的上料位a处,等待分穴摆盘机构400来吸取产品;
58.步骤5:第四吸嘴443在x轴直线模组410、y轴直线模组420、z轴直线模组430和第二旋转电机441的作用下可实现四轴运动,而将分间距传送机构500中载具内的产品搬运至第三夹紧单元310的料盘601中,而实现分穴摆盘操作;
59.步骤6:当料盘中装满物料后,第二丝杆升降模组321驱动第二托板323运行至料盘的下方,且第二托板323托住料盘,第三夹紧气缸311驱动第三夹紧板312向外运动而将料盘601松开,料盘堆叠在第二托板323上,第二托板在第二丝杆升降模组321的驱动下复位。
60.应当指出,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。