1.本实用新型涉及上下料机器人技术领域,具体为一种双车床联动式五轴上下料机器人。
背景技术:
2.上下料机器人能满足“快速/大批量加工节拍”、“节省人力成本”、“提高生产效率”等要求,成为越来越多工厂的理想选择,五轴联动是指在一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可在计算机数控(cnc)系统的控制下同时协调运动进行加工。
3.现有的上下料机器人,在上下料的过程中,根据毛坯料的不同形状,无法进行快速的与刀具适配联动,降低上下料的效率;所以我们提出了一种双车床联动式五轴上下料机器人,以便于解决上述中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种双车床联动式五轴上下料机器人,以解决上述背景技术中提出的现有的上下料机器人,在上下料的过程中,根据毛坯料的不同形状,无法进行快速的与刀具适配联动,降低上下料的效率的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种双车床联动式五轴上下料机器人,包括承料盘,承料盘的上方设有细小磁吸上下料组件与环绕抓取上下料组件,细小磁吸上下料组件与环绕抓取上下料组件相对设置。
6.通过细小磁吸上下料组件与环绕抓取上下料组件相对设置,形成相互交错的上下料活动,当处于大零件时,多个夹持爪环绕环绕抓取上下料组件的外侧,随机两个夹持爪夹持毛坯料,通过第二连接杆、第二联动杆与第二弯曲杆相互转动,与刀具配合移动,同时旋转器转动,随机两个夹持爪夹持加工料,将毛坯料换上,提升加工的效率,当遇到小套管零件,通过多组联动套设组件环绕细小磁吸上下料组件设置,进行吸附抓取,提升上下料的效率。
7.进一步地,细小磁吸上下料组件的下端设有第一弯曲杆、第一联动杆与第一连接杆,第一弯曲杆、第一联动杆与第一连接杆相互转动连接,细小磁吸上下料组件的外端联动套设组件与磁吸套管,磁吸套管位于联动套设组件的一端,联动套设组件设有多组,多组联动套设组件环绕细小磁吸上下料组件设置,当遇到小套管零件,通过多组联动套设组件环绕细小磁吸上下料组件设置,进行吸附抓取,提升上下料的效率。
8.进一步地,第一弯曲杆的外端设有控制电机,通过控制电机,可以控制第一弯曲杆进行活动。
9.进一步地,第一联动杆的外端设有视觉感应器,通过视觉感应器,便于观察外部刀具的移动状态。
10.进一步地,环绕抓取上下料组件的一端设有第二连接杆、第二联动杆与第二弯曲
杆,第二连接杆、第二联动杆与第二弯曲杆相互转动,第二联动杆与第一联动杆上皆开设有滑槽,第一连接杆与第二连接杆的一端皆设有滑动器,第一连接杆与第二连接杆通过滑动器沿滑槽滑动,第二联动杆,环绕抓取上下料组件的顶部设有旋转器,环绕抓取上下料组件的外侧设有夹持爪,夹持爪设有多个,多个夹持爪环绕环绕抓取上下料组件的外侧,第二联动杆的外端设有激光感应器,当处于大零件时,多个夹持爪环绕环绕抓取上下料组件的外侧,随机两个夹持爪夹持毛坯料,通过第二连接杆、第二联动杆与第二弯曲杆相互转动,与刀具配合移动。
11.进一步地,细小磁吸上下料组件与环绕抓取上下料组件的下方设有电动升降组件,电动升降组件的一端设有连接底座,细小磁吸上下料组件和环绕抓取上下料组件与电动升降组件活动连接,通过电动升降组件,可以对整体高低调整。
12.进一步地,承料盘的中间开设有放置槽,放置槽的底部设有减震块,减震块设有多个,多个减震块均布在放置槽的底部,设置的承料盘,可以放置不同的毛坯料,多个减震块均布在放置槽的底部,增加减震性。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用新型通过细小磁吸上下料组件与环绕抓取上下料组件相对设置,形成相互交错的上下料活动,当处于大零件时,多个夹持爪环绕环绕抓取上下料组件的外侧,随机两个夹持爪夹持毛坯料,通过第二连接杆、第二联动杆与第二弯曲杆相互转动,与刀具配合移动,同时旋转器转动,随机两个夹持爪夹持加工料,将毛坯料换上,提升加工的效率,当遇到小套管零件,通过多组联动套设组件环绕细小磁吸上下料组件设置,进行吸附抓取,提升上下料的效率。
15.2、通过设置的承料盘,可以放置不同的毛坯料,多个减震块均布在放置槽的底部,增加减震性。
附图说明
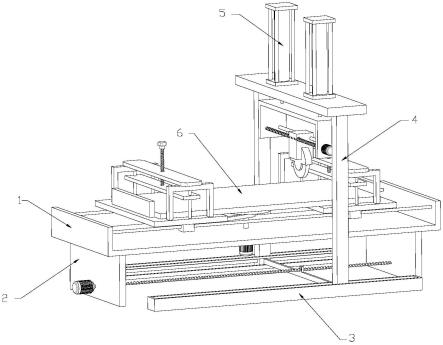
16.图1为本实用新型的整体结构示意图;
17.图2为本实用新型的另一角度示意图;
18.图3为本实用新型的环绕抓取上下料组件示意图;
19.图4为本实用新型的细小磁吸上下料组件示意图。
20.图中:1、承料盘;2、连接底座;3、电动升降组件;4、第一弯曲杆;5、第一联动杆;6、第一连接杆;7、细小磁吸上下料组件;8、环绕抓取上下料组件;9、第二连接杆;10、第二联动杆;11、第二弯曲杆;12、控制电机;13、滑槽;14、放置槽;15、减震块;16、激光感应器;17、夹持爪;18、旋转器;19、联动套设组件;20、磁吸套管;21、视觉感应器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.请参阅图1-4,本实用新型提供的一种实施例:一种双车床联动式五轴上下料机器人,包括承料盘1,承料盘1的上方设有细小磁吸上下料组件7与环绕抓取上下料组件8,细小
磁吸上下料组件7与环绕抓取上下料组件8相对设置,通过细小磁吸上下料组件7与环绕抓取上下料组件8相对设置,形成相互交错的上下料活动,当处于大零件时,多个夹持爪17环绕环绕抓取上下料组件8的外侧,随机两个夹持爪17夹持毛坯料,通过第二连接杆9、第二联动杆10与第二弯曲杆11相互转动,与刀具配合移动,同时旋转器18转动,随机两个夹持爪17夹持加工料,将毛坯料换上,提升加工的效率,当遇到小套管零件,通过多组联动套设组件19环绕细小磁吸上下料组件7设置,进行吸附抓取,提升上下料的效率。
23.在实际使用时,细小磁吸上下料组件7的下端设有第一弯曲杆4、第一联动杆5与第一连接杆6,第一弯曲杆4、第一联动杆5与第一连接杆6相互转动连接,细小磁吸上下料组件7的外端联动套设组件19与磁吸套管20,磁吸套管20位于联动套设组件19的一端,联动套设组件19设有多组,多组联动套设组件19环绕细小磁吸上下料组件7设置,当遇到小套管零件,通过多组联动套设组件19环绕细小磁吸上下料组件7设置,进行吸附抓取,提升上下料的效率,第一弯曲杆4的外端设有控制电机12,通过控制电机12,可以控制第一弯曲杆4进行活动,第一联动杆5的外端设有视觉感应器21,通过视觉感应器21,便于观察外部刀具的移动状态。
24.此外,环绕抓取上下料组件8的一端设有第二连接杆9、第二联动杆10与第二弯曲杆11,第二连接杆9、第二联动杆10与第二弯曲杆11相互转动,第二联动杆10与第一联动杆5上皆开设有滑槽13,第一连接杆6与第二连接杆9的一端皆设有滑动器,第一连接杆6与第二连接杆9通过滑动器沿滑槽13滑动,第二联动杆10,环绕抓取上下料组件8的顶部设有旋转器18,环绕抓取上下料组件8的外侧设有夹持爪17,夹持爪17设有多个,多个夹持爪17环绕环绕抓取上下料组件8的外侧,第二联动杆10的外端设有激光感应器16,当处于大零件时,多个夹持爪17环绕环绕抓取上下料组件8的外侧,随机两个夹持爪17夹持毛坯料,通过第二连接杆9、第二联动杆10与第二弯曲杆11相互转动,与刀具配合移动,细小磁吸上下料组件7与环绕抓取上下料组件8的下方设有电动升降组件3,电动升降组件3的一端设有连接底座2,细小磁吸上下料组件7和环绕抓取上下料组件8与电动升降组件3活动连接,通过电动升降组件3,可以对整体高低调整。
25.具体补充说明的是,承料盘1的中间开设有放置槽14,放置槽14的底部设有减震块15,减震块15设有多个,多个减震块15均布在放置槽14的底部,设置的承料盘1,可以放置不同的毛坯料,多个减震块15均布在放置槽14的底部,增加减震性。
26.综上所述,本实用新型提供一种双车床联动式五轴上下料机器人,包括承料盘1,承料盘1的上方设有细小磁吸上下料组件7与环绕抓取上下料组件8,细小磁吸上下料组件7与环绕抓取上下料组件8相对设置,通过细小磁吸上下料组件7与环绕抓取上下料组件8相对设置,形成相互交错的上下料活动,当处于大零件时,多个夹持爪17环绕环绕抓取上下料组件8的外侧,随机两个夹持爪17夹持毛坯料,通过第二连接杆9、第二联动杆10与第二弯曲杆11相互转动,与刀具配合移动,同时旋转器18转动,随机两个夹持爪17夹持加工料,将毛坯料换上,提升加工的效率,当遇到小套管零件,通过多组联动套设组件19环绕细小磁吸上下料组件7设置,进行吸附抓取,提升上下料的效率。
27.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新
型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。