1.本技术涉及建筑施工装备技术的领域,尤其是涉及一种桩基钢筋笼顶部对中定位工装。
背景技术:
2.钢筋笼作为建筑材料,主要起的作用跟柱子纵向钢筋的受力是同理,主要起抗拉作用,混凝土的抗压强度高但抗拉强度是很低。对桩身混凝土起到约束的作用,使之能承受一定的轴向拉力。
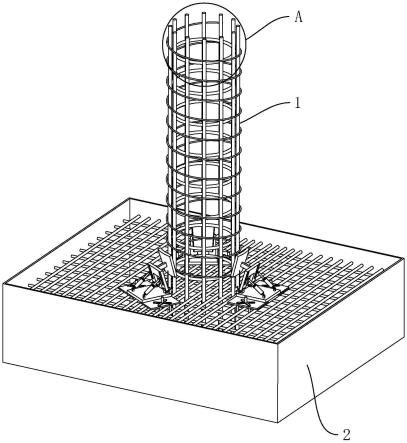
3.参照图1与图2,钢筋笼1通常包括若干根平行设置的纵筋101,若干根纵筋101围设形成圆柱笼状分布,圆柱笼的内部设置有若干根用于支撑圆柱笼的纵筋101的劲箍102,若干根劲箍102沿圆柱笼的长度方向间隔分布,圆柱笼的外侧包覆有用于对圆柱笼进行紧固的螺旋箍筋103,螺旋箍筋103沿圆柱笼的长度方向呈螺旋设置。通过设置劲箍102以及螺旋箍筋103,以提高纵筋101的抗拉能力,同时纵筋101提高了钢筋笼1的抗弯能力。
4.相关技术中,参照图1与图2,钢筋笼1需要安装于柱基2上时,通常需要在柱基2上的钢筋根据所需安装位置设置定位点,从而根据定位点将钢筋笼1端部的纵筋101穿过柱基2上的钢筋,进而通过焊接将纵筋101与钢筋进行固定,以使得钢筋笼1与柱基2进行固定,从而完成对钢筋笼1的安装。
5.然而,在钢筋笼插入柱基后,通过人工的判断难以保证钢筋笼的轴线与定位点的轴线重合,即不能保证钢筋笼的竖直度,以容易导致施工的效果与理想效果出现偏差。
技术实现要素:
6.为了改善现有的不能保证钢筋笼的竖直度,以容易导致施工的效果与理想效果出现偏差的现象,本技术提供一种桩基钢筋笼顶部对中定位工装。
7.本技术提供的一种桩基钢筋笼顶部对中定位工装采用如下的技术方案:
8.一种桩基钢筋笼顶部对中定位工装,包括若干个设置于柱基上的方形支撑座以及转动设置于所述支撑座顶部的转动板,若干个所述支撑座沿劲箍的周向方向间隔分布,所述转动板与所述支撑座铰接配合,所述转动板可绕铰接轴相对所述支撑座进行上下翻转,所述转动板靠近钢筋笼的一侧设置有支撑块,所述支撑块与所述转动板相互垂直,所述转动板与所述支撑座之间设置有用于支撑与驱动所述转动板相对所述支撑座进行移动的驱动组件。
9.通过采用上述技术方案,当钢筋笼插入柱基后,通过调节若干个支撑座相对钢筋笼的距离,从而驱动组件驱动转动板相对支撑座转动,进而转动板带动支撑块转动,以使得支撑块对钢筋笼进行抵紧,由于若干个所述支撑座沿劲箍的周向方向间隔分布,从而若干个支撑块同时对钢筋笼进行抵紧,进而驱动钢筋笼进行对中定位,以使得钢筋笼呈竖直状态,从而解决了不能保证钢筋笼的竖直度,以容易导致施工的效果与理想效果出现偏差的问题。
10.优选的,所述驱动组件包括开设于所述转动板背离所述钢筋笼的一侧的滑槽、滑动设置于所述滑槽中的滑块以及设置于所述滑块与所述支撑座之间的气缸,所述滑槽沿所述转动板的长度方向开设,所述滑槽与所述滑块滑移配合,所述气缸的活塞杆与所述滑块铰接配合,所述气缸的气缸筒固定设置于所述支撑座的顶部。
11.通过采用上述技术方案,当对钢筋笼进行对中定位时,通过气缸的气缸筒与活塞杆的配合,以驱动滑块在滑槽内滑移,且驱动转动板绕转动轴相对支撑座转动,则气缸为转动板提供了动能,从而转动板带动支撑块对钢筋笼进行抵紧,以实现对钢筋笼的对中定位。
12.优选的,所述支撑块远离所述转动板的一端设置有抵接板,所述抵接板的截面与劲箍的径向方向相对应,所述抵接板沿所述转动板的长度方向设置。
13.通过采用上述技术方案,抵接板用于增大支撑块与钢筋笼的接触面积,且当抵接板呈竖直状态时,抵接板通过对钢筋笼进行抵紧,利用抵接板沿转动板的长度方向设置,以可更好的引导钢筋笼移动至竖直状态。
14.优选的,所述转动板的底部开设有避位口,所述避位口贯穿所述转动板的上下侧。
15.通过采用上述技术方案,避位口用于供人手穿过,从而当钢筋笼与柱基对中定位后,通过人手穿过避位口以对钢筋笼与柱基的连接处进行焊接固定,以减少了由于转动板的阻挡而无法对钢筋笼与柱基的连接处进行焊接的情况。
16.优选的,所述支撑座与柱基的钢筋之间设置有用于固定所述支撑座的固定组件,所述固定组件包括转动设置于所述支撑座的两侧的支撑板、四个开设于所述支撑板上的插接孔以及插设于四个所述插接孔内的四脚插销,所述支撑板靠近所述支撑座的一侧铰接配合于所述支撑座的底部,四个所述插接孔呈方形的四角分布,所述插接孔贯穿所述支撑板的上下侧,所述四脚插销分别一一对应插接配合于四个所述插接孔。
17.通过采用上述技术方案,移动并确定支撑座的位置,从而根据柱基上两根钢筋相互交叉的位置,以转动支撑板上的插接孔至两根钢筋的交叉处,保证至少两个插接孔在交叉处呈对角分布,从而通过四脚插销插入四个插接孔,以固定了支撑板与钢筋之间的相对位置,从而固定了支撑座与柱基之间的位置;同时根据不同直径的钢筋笼,可移动支撑座的距离,且通过四脚插销与插接孔插接配合,方便了工人对支撑座进行固定与拆卸。
18.优选的,所述支撑座靠近钢筋笼的一端竖直设置有用于对所述转动板的转动角度进行限位的限位板,所述限位板沿所述支撑座的宽度方向设置。
19.通过采用上述技术方案,限位板用于限制转动板转动的最大角度,使得转动板最大转动限度为竖直状态,从而使得抵接板呈竖直状态,以更好的引导钢筋笼移动至竖直状态,以实现对中定位。
20.优选的,所述限位板背离钢筋笼的一侧设置有橡胶垫,所述橡胶垫沿所述限位板的长度方向设置。
21.通过采用上述技术方案,橡胶垫用于使转动板抵接于限位板得到缓冲与减震,以减少转动板转动速度过大而损坏限位板的情况;同时减少转动板抵接于限位板刚性的边时以对转动板发生折损的情况。
22.优选的,所述抵接板的一侧垂设有用于测量所述支撑座至定位点处的距离的铅锤线。
23.通过采用上述技术方案,当需要确定支撑座的位置时,根据所需安装钢筋笼的直
径大小,以确定在抵接板呈竖直状态下铅垂至定位点的距离大小,从而确定了抵接板相对于定位点的相对位置,进而确定了支撑座相对定位点的位置。在确定完位置后,通过人工将铅锤线绕支撑块进行悬吊,以减少了在抵接板抵接于钢筋笼时铅垂线与钢筋笼缠绕的情况。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.通过驱动组件驱动转动板相对支撑座转动,进而转动板带动支撑块转动,以使得支撑块对钢筋笼进行抵紧,由于若干个支撑块同时对钢筋笼进行抵紧,进而驱动钢筋笼进行对中定位,以使得钢筋笼呈竖直状态;
26.2.根据不同直径的钢筋笼,可移动支撑座的距离,并转动支撑板上的插接孔至两根钢筋的交叉处,通过四脚插销插入四个插接孔,以固定了支撑座与柱基之间的相对位置。
附图说明
27.图1是本技术实施例的整体结构示意图;
28.图2是图1中a部分的放大图;
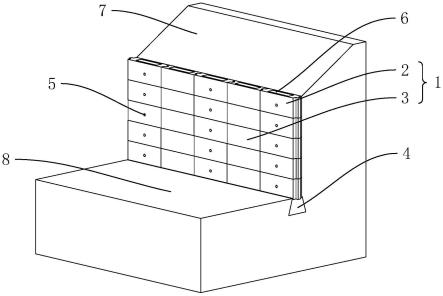
29.图3是本技术实施例中对中定位工装的结构示意图。
30.附图标记说明:1、钢筋笼;101、纵筋;102、劲箍;103、螺旋箍筋;2、柱基;3、支撑座;4、转动板;5、铰接座;6、铰接块;71、滑槽;72、滑块;73、气缸;8、避位口;9、支撑块;10、抵接板;11、限位板;12、橡胶垫;13、铅垂线;141、支撑板;142、四脚插销。
具体实施方式
31.以下结合附图1-3,对本技术作进一步详细说明。
32.一种桩基钢筋笼顶部对中定位工装,参照图1与图3,包括若干个设置于柱基2上的方形支撑座3以及转动设置于支撑座3顶部的转动板4,若干个支撑座3沿劲箍102的周向方向间隔分布,且支撑座3的长度方向与劲箍102的径向方向相对应。在本实施例中,支撑座3的数量为是三个,三个支撑座3沿劲箍102的周向方向呈三角分布。
33.参照图1与图3,支撑座3的顶部设置有两个铰接座5,两个铰接座5沿支撑座3的宽度方向分布,两个铰接座5均设置于支撑座3靠近钢筋笼1的一端。转动板4的底部设置有两个铰接块6,两个铰接块6分别一一对应铰接配合于两个铰接座5,以使得转动板4可绕铰接轴相对支撑座3进行上下翻转。转动板4与支撑座3之间设置有用于支撑与驱动转动板4相对支撑座3进行移动的驱动组件。
34.具体的,参照图1与图3,驱动组件包括开设于转动板4背离钢筋笼1的一侧的滑槽71、滑动设置于滑槽71中的滑块72以及设置于滑块72与支撑座3之间的气缸73,滑槽71沿转动板4的长度方向开设,滑槽71与滑块72滑移配合,气缸73的活塞杆与滑块72铰接配合,气缸73的气缸73筒固定设置于支撑座3的顶部。在本实施例中,驱动组件的数量为两组,两组驱动组件分别位于转动板4的两侧。
35.参照图1与图3,转动板4的底部开设有避位口8,避位口8开设于两个滑槽71之间,避位口8贯穿转动板4的上下侧,避位口8用于供人手穿过,从而当钢筋笼1与柱基2对中定位后,通过人手穿过避位口8以对钢筋笼1与柱基2的连接处进行焊接固定。
36.参照图2与图3,转动板4靠近钢筋笼1的一侧设置有支撑块9,支撑块9与转动板4相
互垂直。支撑块9远离转动板4的一端设置有抵接板10,抵接板10的截面与劲箍102的径向方向相对应,抵接板10沿转动板4的长度方向设置。当转动板4转动至竖直状态时,抵接板10靠近钢筋笼1的一侧抵接于钢筋笼1,且利用抵接板10呈竖直状态,以对其进行对中定位。
37.参照图1与图3,支撑座3靠近钢筋笼1的一端竖直设置有用于对转动板4的转动角度进行限位的限位板11,限位板11沿支撑座3的宽度方向设置,以使得转动板4最大转动限度为竖直状态,从而使得抵接板10呈竖直状态,以对钢筋笼1进行对中定位。限位板11背离钢筋笼1的一侧设置有橡胶垫12,橡胶垫12沿限位板11的长度方向设置,橡胶垫12用于使转动板4抵接于限位板11得到缓冲与减震,以减少转动板4转动速度过大而损坏限位板11的情况。
38.参照图1与图3,抵接板10背离钢筋笼1的一侧垂设有用于测量支撑座3至定位点处的距离的铅锤线,铅垂线13的线头固定连接于抵接板10,铅垂线13的圆锥形铅锤向下延伸至柱基2处并呈悬空设置。当需要确定支撑座3的位置时,根据所需安装钢筋笼1的直径大小,以确定在抵接板10呈竖直状态下铅垂至定位点的距离大小,从而确定了抵接板10相对于定位点的相对位置,进而确定了支撑座3相对定位点的位置。在确定完位置后,通过人工将铅锤线绕支撑块9进行悬吊,以减少了在抵接板10抵接于钢筋笼1时铅垂线13与钢筋笼1缠绕的情况。
39.参照图1与图3,支撑座3与柱基2的钢筋之间设置有用于固定支撑座3的固定组件。具体的,固定组件包括转动设置于支撑座3的两侧的支撑板141、四个开设于支撑板141上的插接孔以及插设于四个插接孔内的四脚插销142,支撑板141靠近支撑座3的一侧铰接配合于支撑座3的底部,四个插接孔呈方形的四角分布,插接孔贯穿支撑板141的上下侧,四脚插销142分别一一对应插接配合于四个插接孔。通过移动并确定支撑座3的位置,从而根据柱基2上两根钢筋相互交叉的位置,以转动支撑板141上的插接孔至两根钢筋的交叉处,保证至少两个插接孔在交叉处呈对角分布,从而通过四脚插销142插入四个插接孔,以固定了支撑板141与钢筋之间的相对位置,从而固定了支撑座3与柱基2之间的位置;同时根据不同直径的钢筋笼1,可移动支撑座3的距离,且通过四脚插销142与插接孔插接配合,方便了工人对支撑座3进行固定与拆卸。
40.本技术实施例的实施原理为:当钢筋笼1插入柱基2后,通过铅垂线13根据钢筋笼1的直径确定若干个支撑座3相对钢筋笼1的距离,从而转动支撑板141上的插接孔至两根钢筋的交叉处,保证至少两个插接孔在交叉处呈对角分布,从而通过四脚插销142插入四个插接孔,以固定了支撑板141与钢筋之间的相对位置,从而固定了支撑座3与柱基2之间的位置;通过气缸73的气缸73筒与活塞杆的配合,以驱动滑块72在滑槽71内滑移,且驱动转动板4绕转动轴相对支撑座3转动至抵接于橡胶垫12,从而转动板4带动支撑块9转动,进而带动抵接板10对钢筋笼1进行抵紧。由于若干个所述支撑座3沿劲箍102的周向方向间隔分布,从而若干个抵接板10同时对钢筋笼1进行抵紧,进而驱动钢筋笼1移动至竖直状态,以实现对钢筋笼1进行对中定位,从而解决了不能保证钢筋笼1的竖直度,以容易导致施工的效果与理想效果出现偏差的问题。
41.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,其中相同的零部件用相同的附图标记表示。故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。