用于利用手术器械使轨迹可视化的系统和方法
1.相关申请的交叉引用
2.本技术要求2020年8月4日提交的美国临时专利申请no.63/060726的利益和优先权,该专利申请被全部通过引用结合到本文中。
背景技术:
3.传统的医疗和外科手术通常涉及使用手术工具和器械,这些手术工具和器械使外科医生能够接近和操纵手术部位。作为非限制性示例,旋转器械(例如手持式钻孔器)通常与矫形手术结合使用,以解决多种肌肉骨骼状况,例如创伤、运动损伤、退行性疾病、关节重建等。
4.在使用手持式钻孔器或类似手术器械的手术中,由致动器(例如,电动马达)选择性地产生的旋转扭矩用于以不同速度旋转可释放地附接的端部执行器(例如钻孔器)或其他手术附件。手术机头组件在端部执行器抵靠在其上的骨上钻孔。
5.一种骨科手术是切开复位内固定(orif)术。在orif手术过程中,外科医生将断骨重新对齐,并利用一个或多个手术植入物将该骨固定就位。这一个或多个手术植入物可包括骨板和螺钉。螺钉将骨板相对于该骨保持在适当位置中。经过一段时间后,当确定骨愈合时,可以移除骨板和螺钉。
技术实现要素:
6.公开了一种用于对患者的骨实施手术的手术系统。该手术系统包括限定至少一个参考轴线并包括一个或多个不透射线标记的参考装置。该参考装置被配置成相对于手术植入物具有固定的姿态。该手术系统还包括第一传感器,该第一传感器被配置成当被设置在参考装置上时相对于参考装置具有固定的姿态,并且被配置成生成与参考装置相对于第一坐标系的定向数据相关的第一信号。该手术系统还包括用于联接到端部执行器的手术器械。手术系统还包括第二传感器,其被配置成相对于手术器械具有固定的姿态,并且被配置成生成与端部执行器和手术器械中的至少一个相对于第二坐标系的定向数据相关的第二信号。手术系统还包括导航系统,其被配置成接收(i)第一信号、(ii)第二信号和(iii)参考装置和患者的骨的图像;显示参考装置和患者的骨的图像。导航系统还被配置成接收与端部执行器和手术器械中的至少一个相对于骨的预期位置相关的至少一个用户输入。该导航系统还被配置成:(i)当手术器械和端部执行器中的至少一个的轴线与至少一个参考轴线对齐时,将第一坐标系配准到第二坐标系,(ii)在图像坐标系中配准至少一个参考轴线相对于骨的定向,以及(iii)基于用户输入,配准端部执行器和手术器械中的至少一个相对于骨的至少一个位置。导航系统还被配置成基于第一信号和第二信号确定端部执行器和手术器械中的至少一个相对于骨的定向。导航系统还被配置成基于端部执行器和手术器械中的至少一个的经配准的位置和所确定的定向,将端部执行器和手术器械中的至少一个的虚拟表示叠加在该图像上。
7.公开了一种用于使用手术系统对患者的骨实施手术的方法。手术系统包括导航系
统、手术器械、限定至少一个参考轴线并包括一个或多个不透射线标记的参考装置、具有第一坐标系并相对于参考装置具有固定的姿态的第一传感器,该参考装置被配置成相对于手术植入物具有固定的姿态。手术器械包括具有第二坐标系并且相对于手术器械具有固定的姿态的第二传感器。手术器械被配置成被联接到端部执行器。该方法包括接收(i)来自第一传感器的与参考装置的定向数据有关的第一信号、(ii)来自第二传感器的与端部执行器和手术器械中的至少一个的定向数据相关的第二信号以及(iii)参考装置和患者的骨的图像。该方法还包括显示参考装置和患者的骨的图像。该方法还包括在显示器上接收与端部执行器和手术器械中的至少一个相对于骨的预期位置相关的用户输入。该方法还包括:(i)当手术器械和端部执行器中的至少一个的轴线与至少一个参考轴线对齐时,将第一坐标系配准到第二坐标系,以及(iii)基于用户输入,配准端部执行器和手术工具中的至少一个相对于骨的位置。该方法还包括基于第一信号和第二信号确定端部执行器和手术器械中的至少一个相对于骨的定向。该方法还包括基于端部执行器和手术器械中的至少一个的经配准的位置和所确定的定向,将端部执行器和手术器械中至少一个的虚拟表示叠加在该图像上。
8.一种用于对患者的骨实施手术的手术系统。手术系统包括限定至少一个参考轴线并包括一个或多个不透射线标记的参考装置。参考装置被配置成被设置在患者身上。该手术系统还包括手术器械,该手术器械包括用于联接到端部执行器的传感器,该传感器被配置成生成与手术器械相对于第一坐标系的定向数据有关的第一信号。手术系统还包括手术导航系统,其被配置成接收参考装置和患者的骨的图像。手术导航系统还被配置成显示参考装置和患者的骨的图像。手术导航系统还被配置成(i)在图像坐标系中配准至少一个参考轴线相对于骨的定向,以及(ii)将第一坐标系配准到图像坐标系。手术导航系统还被配置成基于第一信号确定手术器械相对于骨的定向。手术导航系统还被配置成基于手术器械的所确定的定向和位置来叠加手术器械相对于骨的虚拟表示。
9.从详细描述、权利要求书和附图中,本公开的进一步的适用范围将变得明显。详细说明和具体示例仅用于说明的目的,且并不旨在限制本公开的范围。
附图说明
10.通过详细描述和附图,本公开将得到更为充分的理解。
11.图1是根据本公开的教导的包括手术系统的手术室的示例性布局的透视图。
12.图2是根据本公开的教导的手术系统的功能框图。
13.图3是根据本公开的教导的包括荧光盘(fluorodisc)的成像系统的检测器的透视图。
14.图4是根据本公开的教导的施加在医学图像上的多个基准标记的虚拟表示。
15.图5是根据本公开的教导的手术机头组件的透视图,该手术机头组件包括用于为骨钻孔的具有深度测量附件的手术器械。
16.图6是图5的手术机头组件的横截面和局部透视图。
17.图7是根据本公开的教导的手术机头组件的示意图。
18.图8是根据本公开的教导的深度测量附件的局部分解图。
19.图9是根据本公开的教导的手术机头组件的透视图,其中,深度测量附件与手术器
械被分离开。
20.图10是根据本公开的教导的手术机头组件的透视图,其中,深度测量附件与手术器械被分离开。
21.图11是根据本公开的教导的包括手术器械和多种附件的示例性手术机头组件的示意图。
22.图12是根据本公开的教导的参考装置的透视图的示例,其中,参考传感器被联接到该参考装置。
23.图13a-c是根据本公开的教导的参考装置的第一实施例和参考装置的第二实施例的透视图。
24.图14是根据本公开的教导的示例性骨板的示意图。
25.图15是根据本公开的教导的处于参考定向的手术机头组件的正视图。
26.图16是根据本公开的教导的处于钻孔定向的手术机头组件的正视图。
27.图17-20示出了根据本公开的教导的导航显示器,其描绘了骨、参考装置、骨板和手术机头组件的虚拟表示。
28.在附图中,附图标记可多次使用以识别相似和/或相同的元件。
具体实施方式
29.参考图1和图2,示出了用于使用根据本公开的教导的手术系统10对患者20执行医疗程序的手术室或手术套房的示例性配置。手术系统10可用于执行多种矫形手术(例如orif术),以将断骨81重新对齐并利用一个或多个手术植入物将该骨81固定就位。这一个或多个手术植入物可以包括骨板80和螺钉,这些螺钉被插入到骨81中,直到骨81愈合为止。手术系统10包括手术导航系统50,该手术导航系统包括容纳导航计算机70的推车组件72。导航计算机70也可被称为导航控制器。
30.第一导航显示器74-1和第二导航显示器74-2与导航计算机70进行操作通信。第一导航显示器74-1和第二导航显示器74-2可被统称为导航显示器74。导航计算机70可与一个或多个输入装置77连接,该输入装置77用于将信息输入到导航计算机70中或以其他方式选择/控制导航计算机70的某些方面。一个或多个输入装置77可以包括键盘、鼠标、麦克风(语音激活)、手势控制装置或者可以与导航显示器74(例如,其包括交互式触摸屏显示器/菜单等)集成在一起。本段中讨论的导航计算机70的功能也可以在平板计算机或其他适用的移动装置上实现。
31.手术系统10还可以包括成像系统54(例如c型臂x射线成像装置)或另一适用的成像系统(例如ct或mri成像装置)。成像系统54可以包括检测器56、源58、成像计算机60、成像显示器62和一个或多个用户输入装置68。检测器56和源58被配置成生成一个或多个医学图像。检测器56和源58可被布置于c型臂64的相反两端。源58可以包括在诊断医学成像中使用的发射或生成x射线的任何源,例如固态x射线发射源、旋转阳极x射线源、静止或固定的阳极x射线源、标准x射线源、固态x射线发射源和/或荧光透视x射线源以及静止或固定的阳极x射线源。检测器56可以包括图像增强器或用于诊断医学成像的任何其他能量接收器。
32.包括检测器56和源58的c型臂64可被配置成围绕患者20旋转以产生手术部位30的图像。成像计算机60可与一个或多个用户输入装置68(其包括键盘、鼠标和其他适用的装
置)连接,这些输入装置使用户能够向成像计算机60提供输入。成像计算机60和/或导航计算机70可以包括本领域技术人员已知的软件,该软件能够获取由成像系统54捕获的图像并产生手术部位30的一个或多个2-d图像和/或一个或多个3-d模型。成像显示器62可被配置成显示所得到的2-d图像和/或3-d模型。
33.来自成像系统54(例如c型臂x射线成像装置)的图像通常会被扭曲(即,失真),使得图像中的所有对象可能并未被相同程度地改变大小。这是因为x射线束并不是完全线性的。通常,更为靠近源58的对象看起来更大(并且包括更多像素)。距离源58更远的对象可能看起来更小(并且包括更少的像素)。为了进行准确测量,该图像需要被去扭曲。
34.参考图3和图4,手术系统10还可包括荧光盘57,以提供去扭曲功能。在用于gamma3
tm
系统的fluoromap
tm
自适应定位技术—用户手册,其全部内容被通过引用结合到本文中(https://www.strykermeded.com/media/2325/gamma3-fluoromap.pdf)—中讨论了荧光盘57。荧光盘57也在于2016年11月18日提交的名称为“用于治疗关节的方法和装置,其包括治疗髋关节中的凸轮型股骨髋臼撞击和髋关节中的钳形股骨髋臼撞击(method and apparatus for treating a joint,including the treatment of cam-type femoroacetabular impingement in a hip joint and pincer-type femoroacetabular impingement in a hip joint)”的美国专利公开文献no.2018/0140309a1中进行讨论,该美国专利公开文献的内容被通过引用全部结合到本文中。除了这里讨论的功能之外,成像计算机60和/或导航计算机70可以实现上述参考文献中所讨论的一个或多个系统、方法和/或算法。
35.荧光盘57可包括透明透镜59、设置在透明透镜59上的多个基准标记61以及被配置成将荧光盘57附接到成像系统54的检测器56的附接构件63。荧光盘57(更具体地说,透明透镜59)可以具有任何适用的尺寸,例如,9英寸直径、12英寸直径等。附接构件63可以包括带、一个或多个钩和一个或多个环的组合。多个基准标记61具有已知尺寸。荧光盘57可被配置成通过将多个基准标记61的图案投影到该图像上来提供去扭曲功能。在图4中,示出了被投影到骨81上的多个基准标记61的虚拟表示65。虽然提供了成像系统54包括荧光盘57的示例,但在一些实施方式中,例如当成像系统54包括平板检测器时,成像系统54可以自动提供去扭曲图像,并因此可以省略掉该荧光盘57。基于被投影到图像上的图案,成像计算机60和/或导航计算机70可以基于去扭曲图像来校准适当的像素尺寸。
36.在一些实施方式中,成像计算机60和/或导航计算机70可以使用多个基准标记61的已知尺寸进行多种其他计算。例如,患者20和源58之间的距离可在图像之间有所改变,并因此比例系数或放大系数可以在不同的图像之间有所不同。这样,成像计算机60和/或导航计算机70可以使用参考装置上的多个基准标记61和/或不透射线标记的已知尺寸来确定每个图像的比例系数或放大系数。成像计算机60和/或导航计算机70还可以使用多个基准标记61的已知尺寸来确定c型臂64相对于多个基准标记61的定向。
37.成像计算机60可与导航计算机70通信。成像计算机60可被配置成经由有线和/或无线连接与手术导航系统50通信。例如,成像系统54可被配置成向导航计算机70提供图像,例如所得到的手术部位30的2-d图像和/或3-d模型。导航计算机70可随后被配置成向导航显示器74提供所得到的2-d图像和/或3-d模型,其中,外科医生79或其他医学专业人员可以与图像交互以识别和/或限定骨81周围的相应区域和/或区。
38.例如,经由一个或多个输入装置77,外科医生79可以选择所要显示的骨81的多幅视图,可以为手术机头组件76的端部执行器限定预期轨迹,和/或为导航显示器74选择适用的用户界面。虽然源58和检测器56被示出为被连接到成像计算机60,但在一些配置中,包括检测器56和源58的x射线成像装置可被直接连接到导航计算机70,从而不需要成像计算机60、成像显示器62和用户输入装置68。导航计算机70可被配置成实现与成像计算机60相同的所有功能。
39.手术系统10可包括手术机头组件76。外科医生79可使用手术机头组件76对患者20实施手术,其包括在患者20的骨81上钻孔和/或将螺钉穿过骨板80的一个或多个开口82插入到骨81的钻孔中。传统的手术导航系统通常使用光学跟踪系统或电磁跟踪系统或其组合,以跟踪手术机头组件76的端部执行器相对于患者20的骨81的位置。这种系统各自具有其缺点,这两种系统都会是设置耗时且成本高昂的。光学跟踪系统的一个具体缺点是,它们需要在光学跟踪器和位置跟踪单元(即,摄像头)之间具有视线,这可能在手术室中难以维持。电磁跟踪系统的一个具体缺点是它们比光学跟踪系统精度低,并且容易受到由周围金属物体所造成的失真的影响。这两个系统还要求外科医生79进行手动配准过程,这会是耗时的。
40.在orif术和其他创伤手术期间,由于存在上述缺陷,导致外科医生79可能不使用传统的导航引导跟踪系统。相反,外科医生79可以依靠他/她的手术技能和解剖学知识来对准手术机头组件76的端部执行器的轨迹,以创建用于一个或多个螺钉(或其他手术植入物)的引导孔。同样,在螺钉的放置期间,外科医生79徒手插入螺钉。外科医生79随后通常使用荧光镜检查来验证螺钉的放置。如果外科医生79对螺钉的放置不满意,则外科医生可以更换螺钉。由于外科医生79必须在骨81上钻额外的孔,因此这会对骨81造成额外的损伤。螺钉的不当放置也会导致额外的费用且浪费时间,因为螺钉可能会受损并且重新钻孔和重新验证是耗时的。
41.根据本公开的教导,手术系统10可以包括轨迹跟踪系统,其被配置成跟踪手术机头组件76(更具体地说是端部执行器)的实时定向(即,三个自由度的旋转位置),而无需如常规跟踪系统(例如光学跟踪系统和/或电磁跟踪系统)一样专门跟踪手术机头组件76的位置(即,三个自由度的平移位置)。手术系统10可以可选择地被配置成跟踪与手术机头组件76的端部执行器的位移相关的平移位置的非传统的第四自由度。
42.另外参考图5-10,示出了一个示例性手术机头组件76。手术机头组件76消除了确定钻孔深度的第二装置(例如深度计)的必要性。手术机头组件76包括手术器械104、深度测量附件116a和端部执行器108,例如钻头。手术机头组件76被在2016年9月1日提交的名称为“带有集成式深度计的电动手术钻孔器,该深度计包括在钻头上滑动的探针(powered surgical drill with integral depth gauge that includes a probe that slides over a drill bit)”的国际专利公开文献no.wo2017/0407172和2017年8月17日提交的名称为“用于测量钻孔深度的手术机头和相关附件(surgical handpiece for measuring depth of bore holes and relates accessories)”的国际专利公开文献no.w02019/035096a1中进行了讨论,其全部内容均被通过引用结合到本文中。
43.手术器械104可包括壳体112、马达114、手术机头控制器162、一个或多个用户输入装置164、电池和其他部件,如下文更详细描述的那样。用户输入装置164可以具有触发器型
配置。用户输入装置164响应于用户(例如,外科医生79)的致动,并且例如经由由磁体和霍尔效应传感器产生的电信号而与手术机头控制器162通信。因此,当外科医生79致动用户输入装置164以操作手术机头组件76时,手术机头控制器162将来自电池的电力引导至马达114,该马达114进而生成用于旋转端部执行器108或其他手术端部执行器的旋转扭矩,如下文更详细描述的那样。
44.图6和图7示出了沿壳体112内的近侧/远侧轴线ax定位的马达114,但也可以设想到其它马达位置。马达114可以是电动的、气动的或液压的。马达114被配置成响应于从手术机头控制器接收到的命令、信号等选择性地生成旋转扭矩。马达114包括转子套管115,该转子套管115由一对轴承117支撑以围绕轴线ax旋转。与齿轮组相邻布置的驱动齿轮被联接到转子套管115且与转子套管115同时旋转,并用于将旋转扭矩传递至该齿轮组。
45.在所示的示例中,深度测量附件116a被可拆卸地联接到壳体112。然而,深度测量附件可以与壳体112一体地形成。深度测量附件116a可以包括不同的壳体,例如模块壳体120。深度测量附件116a可被以使外科医生79的手术部位的视野障碍最小化的方式构建而成。深度测量附件114a还可包括位移传感器124和深度测量延伸件128。位移传感器124被可操作地连接到深度测量延伸件128。如所示,深度测量延伸件128是套管。
46.深度测量延伸件128被设置在引导衬套132内,并被支撑以沿测量轴线mx的平移移动。当深度测量附件116a被附接到手术机头组件76时,测量轴线mx被布置成与轴线ax是同轴的。细长的凹进切口143被可选择地横向形成到深度测量延伸件128中且纵向延伸。深度测量延伸件128还包括被沿着深度测量延伸件128的至少一部分长度线性地设置的多个齿条齿140,这多个齿条齿140被设置成与邻近引导衬套132的远端设置的齿轮146啮合接合。如图6中所示,引导衬套132的窗口被邻近齿轮146布置,以便于齿条齿140与齿轮146之间的啮合接合,使得齿轮146的旋转和深度测量延伸件128的移动成正比。位移传感器124响应于由深度测量延伸件128的轴向移动引起的齿轮146的旋转,并且可被利用电位计、旋转编码器等来实现,以便生成表示深度测量延伸件128的位置沿测量轴线mx的变化的电信号。
47.举例来说,在一些配置中,位移传感器124可被设置成与手术机头控制器162或深度测量附件控制器144通信,深度测量附件控制器144可被配置成基于深度测量延伸件128的移动中断马达114或调整马达114的驱动方式,以使端部执行器108旋转到组织中处于特定钻入深度的旋转减慢。
48.参考图8,为了确保深度测量延伸件128和位移传感器124具有适当的功能,可以将深度测量延伸件128朝向延伸位置偏压。通过该偏压,深度测量延伸件128的远端始终保持与待钻孔的骨81的近侧表面或与邻接待钻孔的骨81的骨板80接触。该偏压是通过使用弹簧160来实现的,该弹簧160偏压可旋转齿轮146,使得齿轮146在将深度测量延伸件128向远侧延伸出模块壳体120的方向上旋转。然而,也可以设想到相对于手术器械104偏压该深度测量延伸件128的其他方式。
49.参考图9和图10,深度测量附件116a可以包括壳体连接器150,该壳体连接器150被配置成与手术器械104的器械连接器152可操作地连接,在一个示例中,手术器械104可以仅经由器械连接器152与壳体连接器150之间的连接为深度测量附件116a提供电源连接。在另一示例中,深度测量附件116a和手术器械104还可以经由器械连接器152和壳体连接器150交换数据。深度测量附件控制器144和手术机头控制器162可以通过有线连接(即,通过壳体
连接器150和器械连接器152)或无线连接与导航计算机70或其他装置通信。例如,手术机头控制器162可以将数据发送到远程装置,例如平板电脑或外部服务器。
50.深度测量附件116a还可以包括显示器156(例如显示屏)、一个或多个发光二极管(led)等,以向外科医生79提供与深度测量附件116a的移动相关的信息,从而显示实时钻孔深度、所记录的历史最大钻孔深度、螺钉长度、穿透指示、与当前轨迹相对于用于引导外科医生79对准预期位置的预期轨迹相关的视觉信息(例如,图形表示)等。相同的信息也可以被利用扬声器传送给用户,以便提供实时钻孔深度、所记录的历史最大钻孔深度、穿透指示等的音频指示。
51.深度测量附件控制器144还可被配置成基于位移信号确定穿透事件。深度测量附件控制器144和手术机头控制器162被示出为被分别设置在深度测量附件116a和手术器械104内的单独的控制器,深度测量附件控制器144和手术机头控制器162可被容纳在远程装置中。深度测量附件控制器144和手术机头控制器162也可被集成到单个控制器中。
52.返回参考图7和图8,手术机头组件76还可以包括机头定向传感器172。在一个示例性配置中,可包括作为深度测量附件116a的一部分的机头定位传感器172。深度测量附件控制器144可被可操作地连接到机头定向传感器172。
53.机头定向传感器170生成机头定向信号,导航计算机70可以使用这些机头定向信号来推导出手术机头组件76的定向,更具体地,深度测量附件116a和轴线ax的定向。机头定向信号可以表示机头定向传感器172相对于机头坐标系的角速度。
54.在示例性配置中,机头定向传感器172包括三个单轴陀螺仪,其被以感测三个正交轴(例如深度测量附件116a或手术器械104的x轴、深度测量附件116a或手术器械104的y轴以及深度测量附件116a或手术器械104的z轴)的角速度的方式布置。机头定向传感器172的x轴、y轴和z轴可被称为机头坐标系,并且x轴的角速度、y轴的角速度和z轴的角速度贯穿本公开可被统称为机头定向信号。例如,第一陀螺仪可被配置成感测机头定向传感器172的x轴(即,翻滚轴)的角速度,第二陀螺仪可被配置成感测机头定向传感器172的y轴(即,俯仰轴)的角速度,第三陀螺仪可被配置成感测机头定向传感器172的z轴(即,偏航轴)的角速度。
55.虽然机头定向传感器172的传感器被设想为陀螺仪,但传感器也可以是惯性测量单元,其包括加速度计和/或磁力计并且能够在六个自由度下进行感测。虽然机头定向传感器172被描述为包括三个陀螺仪,但是可以包括任何数量的陀螺仪。在另一示例性配置中,第一陀螺仪、第二陀螺仪和第三陀螺仪可被替代为三轴陀螺仪。机头定向传感器172还可以包括控制器,该控制器被配置成将机头定向信号直接发送到导航计算机70和/或例如通过深度测量附件控制器144或手术机头控制器162间接发送到导航计算机70。
56.机头定向传感器172被配置成相对于手术机头组件76具有固定的姿态(即,位置和定向)。在一些示例中,机头定向传感器172被设置在深度测量附件116a内,如图8所示,或被设置在手术机头组件76的壳体112内。机头定向传感器172也可被设置在另一附件(例如关于图11描述的附件之一)内。
57.在其他示例中,机头定向传感器172被配置成被可释放地附接到手术机头组件76的任何部分,例如深度测量附件116a或手术器械104。因此,深度测量附件116a可以包括用于与机头定向传感器172联接的任何适用的联接器。该联接器可以是夹具、回形针或其他适
用的联接器。例如,机头定向传感器172可被联接到手术器械104的壳体112或深度测量附件116a的外表面。
58.深度测量附件控制器144可与机头定向传感器172通信,以基于用户输入控制机头定向传感器172的操作。例如,用户输入可被经由深度测量附件116a的一个或多个输入装置148(例如第一按钮148a和第二按钮148b)接收到。第一按钮148a可接通/断开机头定向传感器172的电源,第二按钮148b可使机头定向传感器172归零。当被设置在深度测量附件116a内时,机头定向传感器172可从手术器械104接收电力,而不需要单独的电源。尽管在图2的图示中并未示出,但机头定向传感器172可以具有专用控制器,该专用控制器基于输入到第一按钮148a或第二按钮148b的用户输入来控制机头定向传感器172的操作。在其他实施方式中,诸如深度测量附件控制器144之类的另一控制器可以控制机头定向传感器172的操作。
59.在机头定向传感器172并未设置在深度测量附件116a的内部的配置中,机头定向传感器172还可以包括壳体、一个或多个输入装置和电源(例如电池)。这一个或多个输入装置可以包括第一按钮和第二按钮,其被配置成以与深度测量附件116a的第一按钮148a和第二按钮148b类似的方式起作用。
60.参考图11,在某些情况下,可以不使用深度测量附件116a。在这种情况下,手术器械104可被联接到钻头卡盘116b、用于在孔或孔隙的内表面上形成螺纹的丝锥116c或用于驱动螺钉或将螺钉插在骨81的钻孔或孔隙内的驱动件116d。机头定向传感器172可被设置在钻头卡盘116b、丝锥116c或驱动件116d的壳体内。钻头卡盘116b、丝锥116c和驱动件116d可以包括用于控制机头定向传感器172的操作的第一按钮148a和第二按钮148b。作为选择,机头定向传感器172可被联接到钻头卡盘116b、丝锥116c或驱动件116d的外表面。这样,钻头卡盘116b、丝锥116c和驱动件116d可以包括用于将机头定向传感器172附接到钻头卡盘116b、丝锥116c或驱动件116d的外表面的任何适用的联接器。
61.参考图12和图13a-c,跟踪系统可以包括限定至少一个参考轴线的参考装置182。参考装置182被配置成被固定到骨81和/或在一些配置中,骨板80可以介于骨81与参考装置182之间。参考装置182可以包括一个或多个延伸件186,例如第一延伸件186a、第二延伸件186b和第三延伸件186c。尽管参考装置182被示出为具有三个延伸件186,但是参考装置182可以包括任何数量的延伸件186或表面。第一延伸件186a、第二延伸件186b和第三延伸件186c可以各自具有不同的尺寸,例如不同的高度、长度和宽度。参考装置182不限于贯穿本公开所讨论的所示实施例,并且可以包括可限定至少一个参考轴线的任何设计或配置。
62.参考装置182可包括一个或多个基准标记188,其被以适于确定成像时的参考装置182的姿态的方式布置。基准标记188例如可以是不透射线的标记。例如,在一个示例性配置中,第一延伸件186a、第二延伸件186b和第三延伸件186c中的每一个都可以包括可由成像系统54成像的基准标记188。第一延伸件186a可以具有第一组基准标记188a,第二延伸件186b可以具有第二组基准标记188b并且第三延伸件186c可以具有第三组基准标记188c。第一组基准标记188a、第二组基准标记188b和第三组基准标记188c可以各自具有不同的基准标记188。第一延伸件186a的基准标记188a的尺寸、形状和/或间距可以不同于第二延伸件186b的基准标记188b和第三延伸件186c的基准标记188c。一个或多个基准标记188允许导航计算机70或成像计算机60在基于图像的坐标系中计算参考装置182相对于骨81的姿态
(即,位置和定向)。基于图像的坐标系可以限定医学图像的患者表面和/或骨板80的形状和/或姿态。一个或多个基准标记188还可以允许导航计算机70计算图像之间的旋转角度。
63.参考装置182可以形成有限定至少一个参考轴线的表面194。在一些示例中,如图12和图13a中所示,表面194可以是从第二延伸件186b突出的突起,例如槽口或短桩。在该配置中,深度测量附件116a可被联接到该突起。当深度测量附件116a被联接到该突起时,深度测量附件116a和该突起是同心的,并且这使得深度测量附件116a的测量轴线mx与突起的轴线对齐,该突起的轴线又允许两条轴线被配准,这将在下面更详细地描述。在其他示例中,如图13b中所示,表面194是管或圆柱形袋,端部执行器108被插入到其中以将轴线ax配准于该管或圆柱形袋的轴线。一个或多个延伸件186可被连接到联接部分190。联接部分190可被配置成便于经由固定构件192(例如克氏针(克氏线)、销钉或其他适用的固定构件)可释放地附接到骨板80或患者20的骨81。
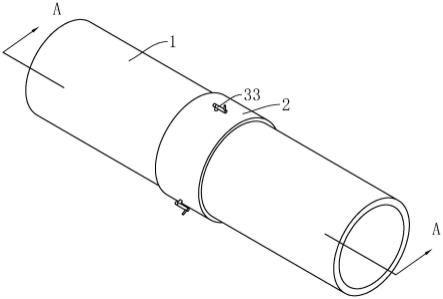
64.参考图14,示出了示例性骨板80。骨板80可以由金属或其他适用的材料制成,并且被配置成固定断骨(例如骨81)。如所示,骨板80可包括多个较大开口82和一对较小开口83。外科医生79可首先利用固定构件192将骨板80固定到骨81上,使得在将螺钉插入到骨81中之前,骨板80并不移动。
65.返回参考图12和图13a-c,固定构件192可被驱动穿过这对较小开口83中的任一开口并驱动到骨81中。克氏线的另一部分(即,未被驱动到骨81中的一侧)可用作参考装置182的锚固器。一旦固定构件192被馈送穿过这对较小开口83之一并被驱动到骨81中,参考装置182就可被联接至固定构件192。联接部分190可包括手指支撑套环208、螺纹部分210、夹头212和锁定旋钮214。手指支撑套环208可被安装于参考装置182的底部或与之一体形成。螺纹部分210可以包括阳螺纹,并且可被安装到手指支撑套环208或与该手指支撑套环206一体形成。
66.夹头212可被安装在螺纹部分210上,或与螺纹部分210一体地形成。夹头212被配置成在固定构件192的周围形成套环,以将参考装置182固定于固定构件191。当夹头在固定构件192的周围形成套环时,可防止参考装置182的旋转和轴向运动。虽然提供了联接部分包括夹头212以将参考装置182固定到固定构件192的示例,但是可以使用任何适用的构件、元件、装置将参考装置182固定到固定构件192,使得参考装置182不能独立于固定构件192移动。
67.锁定旋钮214可被配置成联接于螺纹部分210。例如,锁定旋钮214可被成形以限定通道,该通道被配置成接纳螺纹部分210和夹头212。锁定旋钮214可以在内表面上包括内螺纹。螺纹部分210和锁定旋钮214可以形成配对。在一些实施方式中,组合后的螺纹部分210的尺寸(例如,高度)和夹头212的尺寸(例如,高度)可以与锁定旋钮214的尺寸(例如,高度)大致相同。锁定旋钮214可用于覆盖住该夹头212,使得参考装置182与固定构件192之间的连接保持牢固并且在整个手术过程中不会被无意地断开。
68.在其他配置中,甚至是在外科手术中使用骨板80时,参考装置182仍可被直接连接到骨81,而无需骨板80介入。在这种配置中,固定构件192可被在骨板80的附近插入到骨81中,但并不穿过一对开口82、83中的任一个。
69.一旦已将骨板80暂时固定于骨81,外科医生79或其他医学专业人员就可使用成像系统54对患者20成像。成像系统54随后生成图像和任何3d模型,并将图像和/或3d模型传送
到导航计算机70。
70.参考传感器184被配置成被可拆卸地附接到参考装置182。虽然提供了参考传感器184被可拆卸地附接到参考装置182的示例,但在某些情况下,参考传感器184可以并不被可拆卸地附接于参考装置182,例如当参考传感器184与参考装置182一体地形成时。参考传感器184生成参考装置定向信号,导航计算机70可以使用该参考装置定向信号推导出参考装置182的定向。参考装置定向信号可以表示参考装置182相对于时间的角速度。角速度相对于时间的积分是自参考传感器184上一次归零以来参考装置182(和参考装置坐标系)的角运动(即,定向)的度量。例如,当参考装置182和深度测量延伸件128对准时,参考传感器184可被归零。参考传感器184可以包括壳体191,该壳体191具有被一体地形成或安装于壳体191的附接构件183。附接构件183可以呈夹具、回形针或用于将参考传感器182附接至参考装置182的另一适用装置的形式。当被可释放地附接至参考装置182时,参考传感器184的姿态(即,位置和定向)被相对于参考装置182固定住。
71.参考传感器184可以包括参考控制器187、定向传感器189、一个或多个输入装置185和电源(例如电池)。在示例性配置中,定向传感器189包括三个单轴陀螺仪。第一陀螺仪可以被配置成感测参考传感器184的x轴的角速度,第二陀螺仪可被配置成感测参考传感器184的y轴的角速度,第三陀螺仪可被配置成感测参考传感器184的z轴的角速度。参考传感器184的x轴、y轴和z轴可以被称为参考装置坐标系,并且贯穿本公开,x轴的角速度、y轴的角速度和z轴的角速度可被统称为参考装置定向信号。虽然传感器被设想为陀螺仪,但是传感器也可以是惯性测量单元,其包括加速度计和/或磁力计,其能够在六个自由度下进行感测。虽然定向传感器189被描述为包括三个陀螺仪,但是可包括任何数量的陀螺仪。在另一示例性配置中,第一陀螺仪、第二陀螺仪和第三陀螺仪可被替代为三轴陀螺仪。
72.参考控制器187可以基于一个或多个输入装置185控制参考传感器184的操作,并控制参考装置定向信号到导航计算机70的传输。参考控制器187还可以经由有线或无线连接与深度测量附件控制器144或手术机头控制器162通信。参考传感器184的一个或多个输入装置185可被配置成控制传感器的操作。例如,参考传感器184的一个或多个输入装置185的第一按钮185a可被用于接通/断开参考传感器184的电源,以开始/停止感测,并且一个或多个输入装置184的第二按钮185b可被用于使参考传感器184归零。在一些情况下,参考传感器184可以包括输出。该输出可以包括led、显示器或任何其他输出装置。该输出可以被配置成表示系统10的参考传感器184和/或一个或多个其他部件的状态。
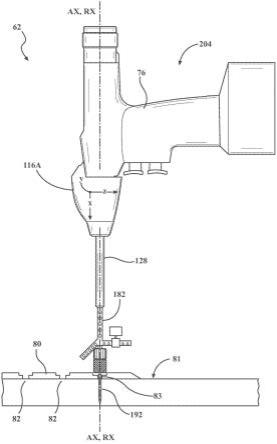
73.参考图15,当在手术机头组件76与参考装置182之间建立参考定向204时,导航计算机70可以将机头坐标系配准到参考装置坐标系。手术机头组件76可由外科医生79在参考定向204与钻孔定向206(如图16所示)之间移动。
74.为了配准相应的坐标系,手术机头组件76可被联接到参考装置182的表面194。在所示示例中,深度测量延伸件128可被定位成使得它被联接到参考装置182的表面194(即,短桩或套管)。外科医生79可以按压该附件上的第二按钮148b,以使机头坐标系相对于参考装置坐标系归零。
75.在替代配置中,导航计算机70可以基于参考装置182或手术机头组件76的一个或多个传感器来检测手术机头组件74相对于参考装置182的接近度。基于检测到的手术机头组件76相对于参考装置182的接近度,导航计算机70可以自动地将参考装置坐标系配准到
机头坐标系。例如,参考装置182可以包括磁体,并且手术机头组件76可以包括霍尔效应传感器,或者,作为选择,参考装置182可以包括霍尔效应传感器,并且手术机头组件76可以包括磁体。在另一示例中,机头控制器162可以检测磁场并将其自身配准到参考装置坐标系,然后向导航计算机70发送信号,以在配准之后开始整合定向信息。
76.机头定向传感器172和参考传感器184包括陀螺仪,陀螺仪受到偏压不稳定性的影响,偏压不稳定性导致陀螺仪随时间漂移。这样,外科医生79可以在手术过程中周期性地将机头定向传感器172与参考装置182配准,以便最小化由陀螺仪漂移所引起的跟踪不准确性。这可通过将端部执行器108重新联接到参考装置182的表面194并通过按压第二按钮148b使机头定向传感器172归零来实现。
77.在参考定向204中,手术机头组件76的轴线ax与由参考装置182限定的参考轴线rx对齐。在许多配置中,参考轴线rx垂直于骨81和骨板80中的一者或两者;然而,参考轴线rx无需垂直于骨81或骨板80。参考图16,手术机头组件76被示出为处于钻孔定向206,手术机头组件76的轴线ax相对于参考轴线rx成斜角。该斜角是稍后可以插入螺钉的钻孔角度。
78.在导航计算机70将机头坐标系相对于参考装置坐标系配准之后,导航计算机70可以开始整合机头定向信号。作为选择,该整合功能可以由另一控制器(例如深度测量附件控制器144、机头定向传感器172的控制器、手术机头控制器162或任何其他适用的控制器)处理。例如,当深度测量延伸件128和参考装置182对齐并且外科医生按下第二按钮148b时,导航计算机可以开始整合机头定向信号。在配准期间,确定机头坐标系与参考装置坐标系之间的坐标变换矩阵。例如,当外科医生79按下与使机头定向传感器172归零相关联的第二按钮148b时,导航计算机70可被提示将机头坐标系配准到参考装置坐标系。在其他示例中,导航计算机70可以提示外科医生79启动配准过程。导航计算机70可以被配置成通过在一段时间内对机头定向信号进行整合来确定手术机头组件76的定向。通过整合机头定向信号,导航计算机70可以随后确定手术机头组件76的定向从参考定向204(如图15中所示)到钻孔定向206(如图16中所示)的变化,并且因此导航计算机70可以确定手术机头组件76的定向。
79.如前所述,由于参考传感器184被以固定的方式附接于参考装置182,并且参考装置182相对于骨81具有固定的姿态,因此参考传感器184用作患者跟踪器。每次获取图像时,可以记录参考传感器184的角度定向的当前值并使其与正在获取的特定图像相关联。导航计算机70可以被配置成通过在一段时间内对参考装置定向信号的角速度值进行整合来确定骨81的定向。通过对角速度值进行整合,导航计算机70可以随后确定手术过程中的骨81的定向变化。
80.参考图17,导航计算机70在导航显示器74上显示图像和3d模型。例如,可以显示胫骨的冠状视图、胫骨的矢状视图和胫骨的横截面视图中的一个或多个。由于该系统并不依赖于传统的跟踪装置来跟踪手术机头组件76的位置,因此手术机头组件76的实际位置必须由外科医生79输入。这样,经由导航显示器74的导航计算机70可以被配置成提示外科医生79以表明手术机头组件76(更具体地,端部执行器108的末端)相对于骨板80和/或骨81的的实际位置。例如,当手术系统10包括骨板80时,导航计算机70可以提示外科医生79做出与端部执行器108的末端的预期位置相对应的第一选择和第二选择。第一选择可以包括选择虚拟骨板的孔隙的阴影,该阴影对应于端部执行器108在xy平面中的预期位置。第二选择可以包括在包括z轴的平面中选择预期位置。例如,为了接收端部执行器在xy平面中的预期位
置,导航计算机70可以提示外科医生79经由触摸操作或经由输入装置77在手术导航显示器74上显示的图像上选择所需的孔隙。
81.在另一示例中,导航计算机70可以提示外科医生79关于端部执行器108的末端相对于3d模型的预期位置的单个用户输入。当该系统不包括骨板80时,导航计算机70可以提示用户表明或选择与手术机头组件76的当前位置相对应的图像的解剖特征。每当机头定向传感器172被归零时,导航计算机70可以提示外科医生79确认手术机头组件76的位置。
82.参考图18,导航计算机70可以将基于外科医生79的位置输入和手术机头组件76的确定定向的虚拟表示叠加在图像上。该虚拟表示可以包括手术机头组件76的模型,例如深度测量附件116a和/或端部执行器108的模型。该虚拟表示可以还包括投影到骨81中的虚拟轨迹。外科医生79可随后使手术机头组件76改变角度,直到外科医生79对该虚拟轨迹感到满意为止。例如,在手术系统10包括骨板80的情况下,端部执行器108的模型可被叠加于选定的孔隙处。在另一示例中,例如当手术系统10不包括骨板80时,深度测量附件116a或端部执行器108的末端的模型可被叠加于图像中的选定解剖特征处。
83.导航计算机70可以被配置成当外科医生79对图像中描绘的虚拟轨迹感到满意时,允许外科医生79将轨迹定格或存储为预期轨迹。当存储预期轨迹时,导航显示器74可还包括图形表示,以在当前轨迹与所存储的预期轨迹匹配时向外科医生79提供视觉提示。例如,移动指示可被显示在导航显示器74上,该移动指示随着手术机头组件76的定向一起移动。该移动指示可被相对于目标(例如,十字线或圆的表示)示出在导航显示器74上。该目标表示该预期轨迹。一旦移动中的圆与目标重叠,当前轨迹就与预期轨迹匹配。此外,视觉信息(例如,图形表示)可被显示在手术机头组件76的显示器156上,使得外科医生能够使当前轨迹与所存储的预期轨迹相一致,而无需查看导航显示器74。
84.手术导航系统50可被配置成在已获得预期轨迹时生成听觉、视觉或触觉警报。虽然本公开设想到在导航显示器74上显示图像和虚拟表示,但导航计算机70可以将虚拟表示发送到其他计算装置和/或显示器,其包括被附接于手术机头组件76的显示器、平板电脑、膝上型计算机或任何其他移动装置。
85.参考图20,如上所述,位移传感器124可被配置成生成位移信号至手术机头控制器162,该位移信号随后被传输至导航计算机70。位移信号响应于端部执行器108在钻孔过程期间或在钻孔过程之前相对于深度测量延伸件128的位移。在一些示例中,导航计算机70可被配置成描绘该钻孔过程随着端部执行器108被钻穿骨81的实时深度描绘。如前所述,由于比例/放大系数可以在不同图像之间有所变化,因此导航计算机70可以使用比例/放大系数来描绘该实时深度描绘。例如,导航计算机70可以在为每个图像确定适当的像素到毫米转换时使用比例/放大系数。
86.在其他示例中,例如当第二附件116b被附接到手术器械104(即,没有深度测量附件116a)时,导航计算机70可被配置成一旦钻孔已经开始,就停止显示手术机头组件76的姿态(即,位置和定向)的虚拟表示和相关的虚拟轨迹。
87.前述描述本质上只是说明性的,且绝不旨在限制本公开、其应用或用途。本公开的广泛教导可以以各种形式实现。因此,尽管本公开包括特定示例,但本公开的真实范围不应受到如此限制,因为在研究附图、说明书和所附权利要求书后,其他修改将变得明显。应当理解,方法中的一个或多个步骤可被以不同的顺序(或同时)执行,而不改变本公开的原理。
此外,尽管上文将每个示例均描述为具有某些特征,但是结合本公开的任何示例描述的那些特征中的任一个或多个可以在任何其他示例的特征中实现和/或与任何其他示例的特征组合,即使该组合未被明确描述,也是如此。换句话说,所描述的示例并不是互斥的,并且一个或多个示例相对于彼此的排列保持处于本公开的范围内。
88.使用多种术语描述元件(例如,控制器、电路元件、半导体层等之间)的空间和功能关系,这些术语包括“连接”、“接合”、“联接”、“相邻”、“旁边”、“顶部上”、“上方”、“下方”和“布置”。除非被明确描述为“直接”,当在上述公开中描述了第一元件与第二元件之间的关系时,该关系可以是直接关系,其中在第一元件和第二元件之间不存在其他介入元件,但也可以是间接关系,其中在第一元件和第二元件之间存在一个或多个介入元件(空间上或功能上)。
89.如本文所用,短语a、b和c中的至少一个应被解释为意指使用非排他性逻辑or的逻辑(a或b或c),而不应被解释为意指“a中的至少一个、b中的至少一个和c中的至少一个”。术语子集不一定要求适当的子集。换句话说,第一集合的第一子集可以共延于(等于)第一集合。
90.在附图中,箭头所示的箭头方向通常表示图示所关注的信息流(例如数据或指令)。例如,当元件a和元件b交换多种信息但从元件a发送到元件b的信息与图示相关时,箭头可以从元件a指向元件b。该单向箭头并不意味着没有其他信息从元件b发送到元件a。此外,对于从元件a发送到元件b的信息,元件b可以向元件a发送对信息的请求或接收确认。
91.在包括以下定义的本技术中,术语“控制器”可被替代为语“电路”。术语“控制器”可指的是、下列的一部分或包括:专用集成电路(asic);数字、模拟或混合模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;组合逻辑电路;现场可编程门阵列(fpga);执行代码的处理器电路(共享、专用或组);存储由处理器电路执行的代码的存储器电路(共享、专用或组);提供所述功能的其他适用的硬件部件;或例如在片上系统中的上述的一些或全部的组合。
92.控制器可以包括一个或多个接口电路。在一些示例中,接口电路可以实现连接到局域网(lan)或无线个人局域网(wpan)的有线或无线接口。lan的示例是电气和电子工程师协会(ieee)标准802.11-2016(也被称为wifi无线网络标准)和ieee标准802.3-2015(也称为以太网有线网络标准)。wpan的示例是来自bluetooth special interest group的蓝牙无线网络标准和ieee标准802.15.4。
93.控制器可以使用接口电路与其他控制器通信。尽管该控制器在本公开中可被描绘为直接与其他控制器进行逻辑通信,但是在多种配置中,控制器实际上可以经由通信系统进行通信。通信系统包括物理和/或虚拟网络设备,例如集线器、交换机、路由器和网关。在一些配置中,通信系统连接到或穿过诸如因特网之类的广域网(wan)。例如,通信系统可以包括使用包括多协议标签交换(mpls)和虚拟专用网络(vpn)在内的技术通过因特网或点对点租用线路彼此连接的多条lan。
94.在多种配置中,控制器的功能可以被分布在经由通信系统连接的多个控制器之间。例如,多个控制器可以实现由负载平衡系统分配的相同功能。在另一示例中,控制器的功能可以在服务器(也被称为远程或云)控制器和客户端(或用户)控制器之间进行分摊。
95.控制器的一些或所有硬件特征可被使用硬件描述语言来限定,例如ieee标准
1364-2005(通常被称为“verilog”)和ieee标准10182-2008(通常被称为“vhdl”)。硬件描述语言可被用于制造和/或编程硬件电路。在一些配置中,控制器的一些或所有特征可以由一种语言限定,例如ieee1666-2005(通常被称为“systemc”),该语言涵盖了如下所述的代码和硬件描述。
96.如上所述,术语代码可以包括软件、固件和/或微代码,并且可以指的是程序、例程、函数、类、数据结构和/或对象。术语共享处理器电路涵盖了执行来自多个控制器的一些或全部代码的单个处理器电路。术语组处理器电路涵盖了处理器电路,该处理器电路与附加处理器电路相结合,执行来自一个或多个控制器的一些或全部代码。对多处理器电路的引用涵盖了离散芯片上的多处理器电路、单个芯片上的多处理器电路、单个处理器电路的多个核、单个处理器电路的多个线程或上述的组合。术语共享存储器电路涵盖了存储来自多个控制器的一些或全部代码的单个存储器电路。术语组存储器电路涵盖了存储器电路,该存储器电路与附加存储器相结合,存储来自一个或多个控制器的一些或全部代码。
97.术语存储器电路是术语计算机可读介质的子集。如本文所使用的术语计算机可读介质并不涵盖通过(例如在载波上的)介质传播的瞬态电或电磁信号;术语计算机可读介质因此可被视为是有形的和非暂时的。非暂时性计算机可读介质的非限制性示例是非易失性存储器电路(例如闪存电路、可擦除可编程只读存储器电路或掩模只读存储器电路)、易失性存储器电路(例如静态随机存取存储器电路或动态随机存取存储电路)、磁存储介质(例如模拟或数字磁带或硬盘驱动器)和光存储介质(例如cd、dvd或蓝光光盘)。
98.本技术中描述的设备和方法可被部分或全部由专用计算机实现,该专用计算机通过配置通用计算机来执行计算机程序中具体体现的一个或多个特定功能而创建。上述功能块和流程图元素用作软件规范,其可通过熟练的技术人员或程序员的日常工作将其转换为计算机程序。
99.计算机程序包括被存储在至少一个非暂时性计算机可读介质上的处理器可执行指令。计算机程序还可以包括或依赖于所存储的数据。计算机程序可以涵盖与专用计算机的硬件交互的基本输入/输出系统(bios)、与专用计算机的特定装置交互的装置驱动器、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
100.计算机程序可包括:(i)待解析的描述性文本,例如html(超文本标记语言)、xml(可扩展标记语言)或json(javascript对象符号)、(ii)汇编代码、(iii)由编译器从源代码生成的目标代码、(iv)由解释器执行的源代码、(v)由实时编译器编译和执行的源代码等。仅作为示例,源代码可以使用来自包括c、c 、c#、objective-c、swift、haskell、go、sql、r、lisp、fortran、perl、pascal、curl、ocaml、html5(超文本标记语言第五版)、ada、asp(动态服务器网页)、php(php:超文本预处理器)、scala、eiffel、smalltalk、erlang、ruby、visuallua、matlab、sensorlink和在内的语言的语法编写。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。