技术特征:
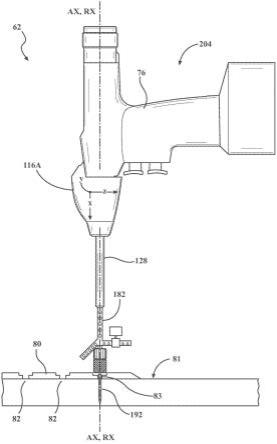
1.一种用于对患者的骨实施手术的手术系统,所述手术系统包括:参考装置,所述参考装置限定至少一个参考轴线并包括一个或多个不透射线标记,所述参照装置被配置成相对于手术植入物具有固定的姿态;第一传感器,所述第一传感器被配置成当被设置在所述参考装置上时相对于所述参考装置具有固定的姿态,并且被配置成生成与所述参考装置相对于第一坐标系的定向数据有关的第一信号;手术器械,所述手术器械用于联接到端部执行器;第二传感器,所述第二传感器被配置成相对于所述手术器械具有固定的姿态,并且被配置成生成与所述端部执行器和所述手术器械中的至少一个相对于第二坐标系的定向数据有关的第二信号;以及导航系统,所述导航系统被配置成:接收(i)第一信号、(ii)第二信号以及(iii)所述参考装置和所述患者的骨的图像;显示所述参考装置和所述患者的骨的图像;接收与所述端部执行器和所述手术器械中的至少一个相对于所述骨的预期位置相关的用户输入;(i)当所述手术器械和所述端部执行器中的至少一个的轴线与所述至少一个参考轴线对齐时,将所述第一坐标系配准到所述第二坐标系,(ii)在图像坐标系中配准所述至少一个参考轴线相对于所述骨的定向,以及(iii)基于所述用户输入,配准所述端部执行器和所述手术器械中的至少一个相对于所述骨的位置;基于所述第一信号和所述第二信号确定所述端部执行器和所述手术器械中的至少一个相对于所述骨的定向;以及基于所述端部执行器和所述手术器械中的至少一个的经配准的位置和所确定的定向,将所述端部执行器和所述手术器械中的至少一个的虚拟表示叠加在所述图像上。2.如权利要求1所述的手术系统,其中,所述第二传感器被配置成被设置在所述手术器械上。3.如前述权利要求中的任一项所述的手术系统,其中:所述图像包括所述一个或多个不透射线标记的阴影;并且所述导航系统被配置成基于所述一个或多个不透射线标记的阴影的姿态,在所述图像坐标系中配准所述第一传感器相对于所述骨的定向。4.如前述权利要求中的任一项所述的手术系统,其中,所述手术系统还包括所述手术植入物,所述手术植入物是包括一个或多个孔隙的骨板。5.如权利要求4所述的手术系统,其中,所述手术系统还包括固定构件,其中:所述参考装置包括联接部分;并且所述固定构件的第一部分被配置成将所述手术植入物固定到所述骨,并且所述固定构件的另一部分被配置成被联接到所述参考装置的所述联接部分。6.如权利要求4或5中的任一项所述的手术系统,其中:所述图像包括所述一个或多个孔隙的一个或多个阴影;并且所述用户输入包括对应于xy平面中的预期位置的所述一个或多个孔隙的阴影的第一选择和对应于包括z轴的平面中的预期位置的第二选择。
7.如前述权利要求中的任一项所述的手术系统,其中,所述手术系统还包括第一端部执行器和第二端部执行器,其中:所述端部执行器被进一步限定为第一端部执行器;所述手术器械被配置成当被联接到所述第一端部执行器时,执行第一功能;所述手术器械被配置成被联接到第二端部执行器以执行第二功能;并且所述第一功能和所述第二功能是不同的功能。8.如前述权利要求中的任一项所述的手术系统,其中,所述第一传感器和所述第二传感器是陀螺仪。9.如前述权利要求中的任一项所述的手术系统,其中,所述手术系统还包括所述端部执行器,所述参考装置包括限定所述至少一个参考轴线的表面。10.如权利要求9所述的手术系统,其中,所述端部执行器被配置成被插入到所述表面中。11.如权利要求9或10中的任一项所述的手术系统,其中,所述端部执行器被以固定的定向联接到所述手术器械。12.如权利要求9所述的手术系统,其中,所述表面是套管。13.如权利要求9-12中的任一项所述的手术系统,其中,所述一个或多个不透射线标记被设置在所述至少一个参考轴线上。14.如权利要求9-13中的任一项所述的手术系统,其中:所述端部执行器是钻头;所述手术器械包括深度传感器,所述深度传感器被配置成在钻孔过程中提供与所述钻头的位移相关联的第三信号;并且所述导航系统被配置成接收所述第三信号,并且所述虚拟表示还基于所述第三信号。15.如权利要求1-13中的任一项所述的手术系统,其中,所述手术系统还包括被配置成被附接到所述手术器械的深度测量附件,所述深度测量附件包括深度传感器,所述深度传感器被配置成在钻孔过程中提供与所述端部执行器的位移相关联的第三信号,所述参考装置包括柱,所述柱限定所述至少一个参考轴线并且被配置成被插入到所述深度测量附件中,并且所述第二传感器被设置在所述深度测量附件内。16.如权利要求15所述的手术系统,其中,所述手术系统还包括被配置成被附接到成像系统的装置,其中:所述导航系统被配置成基于所述至少一个参考轴线的所述一个或多个不透射线标记和所述装置中的至少一者来确定所述图像的比例系数;并且所述导航系统被配置成接收所述第三信号,并且所述虚拟表示还基于所述比例系数。17.如权利要求16所述的手术系统,其中,所述装置是荧光盘,所述荧光盘包括透明透镜、设置在所述透明透镜上的多个基准标记以及被配置成将所述荧光盘附接到所述成像系统的附接构件。18.一种用于使用手术系统对患者的骨实施手术的方法,所述手术系统包括导航系统、手术器械、限定至少一个参考轴线并包括一个或多个不透射线标记的参考装置、具有第一坐标系并相对于所述参考装置具有固定的姿态的第一传感器,所述参考装置被配置成相对于手术植入物具有固定的姿态,所述手术器械包括具有第二坐标系并相对于所述手术器械
具有固定的姿态的第二传感器,所述手术器械被配置成被联接到端部执行器,所述方法包括:接收(i)来自所述第一传感器的与所述参考装置的定向数据有关的第一信号,(ii)来自所述第二传感器的与所述端部执行器和所述手术器械中的至少一个的定向数据相关的第二信号,以及(iii)所述参考装置和所述患者的骨的图像;显示所述参考装置和所述患者的所述骨的图像;在所述显示器上接收用户输入,所述用户输入与所述端部执行器和所述手术器械中的至少一个相对于所述骨的预期位置相关;(i)当所述手术器械和所述端部执行器中的至少一个的轴线与所述至少一个参考轴线对齐时,将所述第一坐标系配准到所述第二坐标系,以及(iii)基于所述用户输入,配准所述端部执行器和所述手术器械中的至少一个相对于所述骨的位置;基于所述第一信号和所述第二信号确定所述端部执行器和所述手术器械中的至少一个相对于所述骨的定向;以及基于所述端部执行器和所述手术器械中的至少一个的经配准的位置和所确定的定向,将所述端部执行器和所述手术器械中的至少一个的虚拟表示叠加在所述图像上。19.如权利要求18所述的方法,其中,所述方法还包括:将所述端部执行器和所述手术器械中的至少一个与所述参考装置的表面对准;以及当所述端部执行器和所述手术器械中的至少一个与所述参考装置的所述表面对准时,将所述第一坐标系配准到所述第二坐标系。20.如权利要求18或19中的任一项所述的方法,其中:所述图像包括所述一个或多个不透射线标记的阴影;以及基于所述一个或多个不透射线标记的阴影的位置,在图像坐标系中配准所述第一传感器相对于所述骨的定向。21.如权利要求18-20中的任一项所述的方法,其中,所述方法还包括将所述参考装置联接到所述手术植入物。22.如权利要求18-21中的任一项所述的方法,其中:所述手术系统还包括具有一个或多个孔隙的所述手术植入物;所述图像包括所述一个或多个孔隙的阴影;以及所述用户输入包括对应于xy平面中的预期位置的所述一个或多个孔隙的阴影的第一选择和对应于包括z轴的平面中的预期位置的第二选择。23.如权利要求18-22中的任一项所述的方法,其中,所述手术系统包括第二端部执行器,并且所述端部执行器被进一步限定为第一端部执行器,所述方法还包括:将所述第一端部执行器联接到所述手术器械以执行第一功能;以及将第二端部执行器联接到所述手术器械以执行第二功能。24.如权利要求18-23中的任一项所述的方法,其中,所述手术系统还包括深度测量附件,所述深度测量附件被配置成被附接到所述手术器械,所述深度测量附件包括深度传感器,所述深度传感器被配置成在钻孔过程中提供与所述端部执行器的位移相关联的第三信号,并且所述参考装置包括限定所述至少一个参考轴线的柱,所述方法还包括通过将所述柱插入到所述深度测量附件中而将所述深度测量附件联接到所述柱。
25.一种用于对患者的骨实施手术的手术系统,所述手术系统包括:参考装置,所述参考装置限定至少一个参考轴线并包括一个或多个不透射线标记,所述参照装置被配置成被设置在所述患者身上;手术器械,所述手术器械包括传感器,所述传感器用于联接到端部执行器,所述传感器被配置成生成与所述手术器械相对于第一坐标系的定向数据有关的第一信号;以及手术导航系统,所述手术导航系统被配置成:接收所述参考装置和所述患者的所述骨的图像;显示所述参考装置和所述患者的所述骨的所述图像;(i)在图像坐标系中配准所述至少一个参考轴线相对于所述骨的定向以及(ii)将所述第一坐标系配准到所述图像坐标系;基于所述第一信号确定所述手术器械相对于所述骨的定向;以及基于所述手术器械的所确定的定向和位置,叠加所述手术器械相对于所述骨的虚拟表示。26.如权利要求25所述的手术系统,其中,所述手术器械的位置被基于输入到所述手术导航系统的用户输入来确定。27.如权利要求25或26中的任一项所述的手术系统,其中,当所述手术器械和所述端部执行器中的至少一个的轴线与所述至少一个参考轴线对齐时,所述第一坐标系被配准到所述图像坐标系。
技术总结
描述了一种用于在患者的骨上实施手术的手术系统。该手术系统包括:参考装置,其包括一个或多个不透射线标记;第一传感器,其被配置成生成与参考装置相对于第一坐标系的定向数据有关的第一信号;用于联接到端部执行器的手术器械;第二传感器,其被配置成生成与端部执行器和手术器械中的至少一个相对于第二坐标系的定向数据有关的第二信号;以及导航系统。该导航系统被配置成确定端部执行器和手术器械中的至少一个的定向,并基于所确定的定向和用户输入将端部执行器与手术器械中的至少一个的虚拟表示叠加在该图像上。个的虚拟表示叠加在该图像上。个的虚拟表示叠加在该图像上。
技术研发人员:R
受保护的技术使用者:史赛克公司
技术研发日:2021.08.04
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。