1.本发明涉及一种电梯领域,尤其涉及一种机器人电梯控制方法、系统、电梯、电子设备和介质。
背景技术:
2.随着经济和科技的发展,配送机器人已应用于各种室内场景,并进行跨楼层作业,机器人通过搭乘电梯实现跨楼层作业时需要接入电梯系统,通过电梯控制系统提供的相关接口与电梯系统进行联动控制,实现呼梯、控梯等乘梯操作,而对于不同环境下,机器人需要接入不同厂家的电梯系统,但是不同电梯厂家软件接口开放程度不一,当厂家未开放软件接口,机器人则需要人帮助呼梯和点按楼层才能完成乘梯流程,存在一定的局限性;机器人与正常用户共同使用同一套电梯控制系统,存在相互影响制约,降低了电梯使用效率及系统稳定性,而且在机器人乘梯过程中无法实时监测到电梯状态,出现异常时无法及时处理。
技术实现要素:
3.本发明为了克服现有技术的不足,提供了一种机器人电梯控制方法、系统、电梯、电子设备和介质。
4.本发明提供的一种机器人电梯控制方法,包括以下步骤:
5.接收机器人发出的呼梯信号,获取机器人的出发楼层和目标楼层;
6.激发点亮出发楼层对应的电梯楼层键;控制电梯行驶至出发楼层;
7.识别电梯所在楼层;电梯如果到达出发楼层,控制电梯开门;
8.通知机器人进入电梯并接收机器人进梯完成信号;
9.机器人进入电梯后,控制电梯关门;
10.激发点亮目标楼层对应的电梯楼层键;控制电梯行驶至目标楼层;
11.识别电梯所在楼层;电梯如果到达目标楼层,控制电梯开门;
12.通知机器人退出电梯并接收机器人退梯完成信号;
13.机器人完成退梯后控制电梯关门。
14.优选地,在进行上述的各步骤时,还同时进行以下步骤:
15.采集电梯运行信号并判断电梯状态;将乘梯过程和电梯状态上传至运维调度平台;在采集电梯运行信号并判断电梯状态后,还包括将所述电梯状态发送给机器人。
16.优选地,在所述控制电梯行驶至出发楼层过程中,如果出发楼层对应的电梯楼层键被消号,则重新激发点亮出发楼层对应的电梯楼层键;在所述控制电梯行驶至目标楼层过程中,如果目标楼层对应的电梯楼层键被消号,则重新激发点亮目标楼层对应的电梯楼层键。
17.优选地,在所述控制电梯行驶至出发楼层过程中,如果电梯行驶错过所述出发楼层,则重新激发点亮出发楼层对应的电梯楼层键;在所述控制电梯行驶至目标楼层过程中,
如果电梯行驶错过所述目标楼层,则重新激发点亮目标楼层对应的电梯楼层键。
18.优选地,接收机器人发出的呼梯信号后,还获取机器人的编号和/或任务号;所述通知机器人进入电梯具体为通知对应编号和/或任务号的机器人进入电梯,和/或所述通知机器人退出电梯具体为通知对应编号和/或任务号的机器人退出电梯。
19.本发明还提供一种机器人电梯控制系统
,
所述系统独立于原电梯系统,包括:
20.网络模块,所述网络模块包括:第一获取模块、第一进退梯通信模块;
21.控制模块,所述控制模块包括:点亮出发楼层键模块、点亮目标楼层键模块、出发楼层行驶模块、目标楼层行驶模块、第一开门模块、第二开门模块、第一关门模块、第二关门模块;亮键识别模块;
22.第一获取模块,用于接收机器人发出的呼梯信号,获取机器人的出发楼层和目标楼层;
23.点亮出发楼层键模块,用于激发点亮出发楼层对应的电梯楼层键;
24.出发楼层行驶模块,用于控制电梯行驶至出发楼层;
25.楼层识别模块,用于识别电梯所在楼层;
26.第一开门模块,用于电梯如果到达出发楼层,控制电梯开门;
27.第一进退梯通信模块,用于通知机器人进入电梯并接收机器人进梯完成信号;
28.第一关门模块,用于机器人进入电梯后,控制电梯关门;
29.点亮目标楼层键模块,用于激发点亮目标楼层对应的电梯楼层键;
30.目标楼层行驶模块,用于控制电梯行驶至目标楼层;
31.第二开门模块,用于电梯如果到达目标楼层,控制电梯开门;
32.第一进退梯通信模块,还用于通知机器人退出电梯并接收机器人退梯完成信号;
33.第二关门模块,用于机器人完成退梯后控制电梯关门。
34.优选地,所述机器人电梯控制系统还包括:
35.调试配置模块,用于安装调试人员对系统进行调试配置;
36.信号采集模块,用于采集电梯运行信号并判断电梯状态;
37.所述网络模块还包括:
38.运维通信模块,用于将乘梯过程和电梯状态上传至运维调度平台;
39.第一回应模块,用于将所述电梯状态发送给机器人。
40.本发明还提供一种电梯,所述电梯包括上述一种机器人电梯控制系统。
41.本发明还提供一种电子设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述一种机器人电梯控制方法。
42.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述一种机器人电梯控制方法。
43.相比现有技术,本发明的有益效果在于:机器人乘梯功能无需依赖于电梯厂商提供专用接口;机器人电梯控制系统与原电梯系统相互独立运行,机器人无需与正常用户共同使用同一套电梯控制系统,提高电梯使用效率及系统稳定性;在机器人乘梯过程中实时监测到电梯状态,出现异常时能够及时处理。
附图说明
44.图1为本发明一种机器人电梯控制方法的流程图;
45.图2为本发明一种机器人电梯控制系统的结构框图;
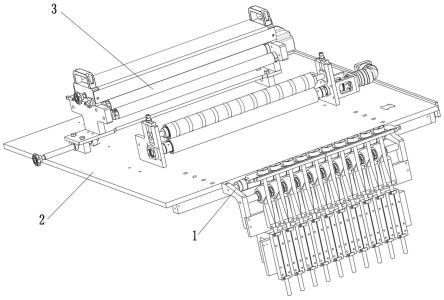
46.图3为本发明一种电梯的结构框图。
具体实施方式
47.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以用许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
48.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
49.实施例1
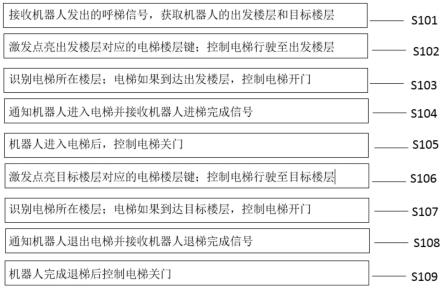
50.本实施例涉及一种机器人电梯控制方法,如图1所示,包括以下步骤:
51.s101:接收机器人发出的呼梯信号,获取机器人的出发楼层和目标楼层;
52.s102:激发点亮出发楼层对应的电梯楼层键;控制电梯行驶至出发楼层;
53.s103:识别电梯所在楼层;电梯如果到达出发楼层,控制电梯开门;
54.s104:通知机器人进入电梯并接收机器人进梯完成信号;
55.s105:机器人进入电梯后,控制电梯关门;
56.s106:激发点亮目标楼层对应的电梯楼层键;控制电梯行驶至目标楼层;
57.s107:识别电梯所在楼层;电梯如果到达目标楼层,控制电梯开门;
58.s108:通知机器人退出电梯并接收机器人退梯完成信号;
59.s109:机器人完成退梯后控制电梯关门。
60.在s101中,电梯安装有机器人电梯控制系统,机器人电梯控制系统通过网络模块或者433近场通信模块与机器人(例如送餐机器人、快递机器人等)进行通信,接收机器人发出的呼梯信号,获取对应机器人所在的出发楼层和需要前往的目标楼层,其中网络模块可选择使用移动通信网络模块、zigbee通信网络模块等;433近场通信模块指433mhz射频通信,利用射频进行信息传输,在没有网络的情况下也能够进行通信,因此机器人与系统通信可根据当前信号质量从网络模块和433近场通信模块中选择进行通信,比如网络信号较好时,可选择使用网络模块或者433近场通信模块,而网络信号较差时或者无网络的情况下,则选择使用433近场通信模块。
61.在s102中,机器人电梯控制系统的网络模块或433近场通信模块获取到所述呼梯信号和出发楼层、目标楼层信息后,通过控制模块根据接收到的出发楼层信息自动激发点亮电梯轿厢内电梯楼层键盘上出发楼层对应的电梯楼层键,并且根据点亮出发楼层对应的的电梯楼层键通过控制模块控制电梯行驶至出发楼层。
62.在s103中,在上述电梯行驶至出发楼层的过程中,机器人电梯控制系统通过楼层
识别模块识别当前电梯所在层数,当识别到的层数为出发楼层时,系统则通过控制模块控制电梯停止行驶并开门。
63.在s104中,电梯抵达出发楼层开门后,通过网络模块或433近场通信模块通知对应机器人进入电梯,机器人进入电梯后则向系统发送进梯完成信号,而系统通过网络模块或433近场通信模块接收进梯完成信号。
64.在s105中,系统的网络模块或433近场通信模块在接收进梯完成信号后,通过控制模块控制电梯关门。
65.在s106中,系统通过控制模块激发点亮电梯轿厢内电梯楼层键盘上机器人所前往的目标楼层对应的电梯楼层键,且根据点亮目标楼层对应的的电梯楼层键控制电梯行驶至目标楼层。
66.在s107中,在上述电梯行驶至目标楼层的过程中,机器人电梯控制系统通过楼层识别模块识别当前电梯所在层数,当识别到的层数为目标楼层时,系统则通过控制模块控制电梯停止行驶并开门。
67.在s108中,电梯抵达目标楼层开门后,通过网络模块或433近场通信模块通知前往该目标楼层的机器人退出电梯,机器人退出电梯后则向系统发送退梯完成信号,而系统通过网络模块或433近场通信模块接收退梯完成信号。
68.在s109中,系统的网络模块或433近场通信模块在接收退梯完成信号后,通过控制模块控制电梯关门。
69.需要说明的是,楼层识别模块可根据电梯的光电式平层开关或磁电式平层开关的电信号变化进行识别楼层,比如在安装人员给电梯装入机器人电梯控制系统时,根据电梯当前层数给楼层识别模块设置初始层数,当电梯经过楼层区域时,光电式平层开关的光通路被楼层区域的隔光板挡住或磁电式平层开关的磁回路被楼层区域的磁隔板挡住,使光电式平层开关电信号或磁电式平层开关电信号发生变化,电信号每变化一次,楼层识别模块根据电梯升降进行计数识别得到当前电梯所在楼层,比如,电梯上升每经过一个楼层,则初始层数 1,电梯下降每经过一个楼层,则初始层数-1,需要注意的是,楼层识别模块自动将初始层数更新为当前识别到的楼层数。
70.在一些实施例中,在执行上述机器人乘梯任务过程中,还同时执行以下步骤:
71.采集电梯运行信号并判断电梯状态;
72.将乘梯过程和电梯状态上传至运维调度平台;
73.在采集电梯运行信号并判断电梯状态后,还将所述电梯状态发送给机器人。
74.机器人电梯控制系统在接收到机器人发送的呼梯信号后,便通过信号采集模块不断实时采集电梯当前的运行信号,判断电梯状态,所述电梯状态包括:电梯开门、电梯关门、电梯上升、电梯下降、现所在楼层等,并通过网络模块或433近场通信模块将上述电梯状态信息实时发送给机器人,让机器人可根据电梯状态信息顺利完成乘梯任务,而且系统还通过网络模块将电梯状态信息和乘梯过程实时上传至运维调度平台,运维人员可通过运维调度平台监测电梯状态和乘梯过程,如果出现异常,可接入系统处理,比如:控制模块没有自动根据获取到的出发楼层和/或目标楼层点亮对应的电梯楼层键,运维人员可通过运维调度平台链接系统的网络模块通知控制模块点亮。
75.在一些实施例中,在所述控制电梯行驶至出发楼层过程中,如果控制模块识别到
出发楼层对应的电梯楼层键被消号,则重新激发点亮出发楼层对应的电梯楼层键,让电梯顺利抵达机器人所在的出发楼层;而在所述控制电梯行驶至目标楼层过程中,如果控制模块识别到目标楼层对应的电梯楼层键被消号,则重新激发点亮目标楼层对应的电梯楼层键,让电梯顺利抵达机器人所要前往的目标楼层。
76.在一些实施例中,在所述控制电梯行驶至出发楼层过程中,如果楼层识别模块识别到电梯行驶错过所述出发楼层,则控制模块重新激发点亮出发楼层对应的电梯楼层键,控制电梯重新行驶至出发楼层;在所述控制电梯行驶至目标楼层过程中,如果楼层识别模块识别到电梯行驶错过所述目标楼层,则控制模块重新激发点亮目标楼层对应的电梯楼层键,控制电梯行驶至目标楼层。
77.在一些实施例中,如果机器人需要更换新的出发楼层,则系统的网络模块和/或433近场通信模块重新获取新的出发楼层信息,控制模块激发点亮新的出发楼层对应的电梯楼层键并控制电梯前往新的出发楼层后,网络模块和/或433近场通信模块才通知机器人进入电梯;如果机器人需要更换新的目标楼层,则系统的网络模块和/或433近场通信模块重新获取新的目标楼层信息,控制模块激发点亮新的目标楼层对应的电梯楼层键并控制电梯前往新的目标楼层后,网络模块和/或433近场通信模块才通知机器人退出电梯。
78.在一些实施例中,网络模块和/或433近场通信模块接收机器人发出的呼梯信号后,还获取机器人的编号和/或任务号,在一个或多个机器人需要同时乘电梯的情况下,电梯到达每个机器人对应的出发楼层后,系统的网络模块和/或433近场通信模块通知对应编号和/或任务号的机器人进入电梯,和/或电梯到达每个机器人对应的目标楼层后,系统的网络模块和/或433近场通信模块通知对应编号和/或任务号的机器人退出电梯,避免通知机器人前往非对应的目标楼层。
79.实施例2
80.如图2所示,本发明实施例还提供一种机器人电梯控制系统,该系统独立于原电梯系统运行,与原电梯系统并行于电梯中,机器人电梯控制系统有独立的梯控功能,与原电梯系统互不干扰,机器人电梯控制系统仅供机器人乘梯时使用,包括:
81.网络模块,所述网络模块包括:第一获取模块、第一进退梯通信模块、运维通信模块、第一回应模块;
82.控制模块,所述控制模块包括:点亮出发楼层键模块、点亮目标楼层键模块、出发楼层行驶模块、目标楼层行驶模块、第一开门模块、第二开门模块、第一关门模块、第二关门模块、亮键识别模块;
83.第一获取模块,用于接收机器人发出的呼梯信号,获取机器人的出发楼层和目标楼层;还用于获取机器人的编号和/或任务号,实现在多个机器人乘梯时能够接送对应的机器人前往对应的目标楼层,避免错误通知机器人进出电梯。
84.点亮出发楼层键模块,用于激发点亮出发楼层对应的电梯楼层键。
85.出发楼层行驶模块,用于控制电梯行驶至出发楼层。
86.楼层识别模块,用于识别电梯所在楼层;还用于识别电梯行驶至出发楼层中是否错过出发楼层和/或识别电梯行驶至目标楼层中是否错过目标楼层。楼层识别模块可根据电梯的光电式平层开关或磁电式平层开关的电信号变化进行识别楼层,比如在安装人员给电梯装入机器人电梯控制系统时,根据电梯当前层数给楼层识别模块设置初始层数,当电
梯经过楼层区域时,光电式平层开关的光通路被楼层区域的隔光板挡住或磁电式平层开关的磁回路被楼层区域的磁隔板挡住,使光电式平层开关电信号或磁电式平层开关电信号进行一次变化,电信号每变化一次,楼层识别模块根据电梯升降进行计数识别得到当前电梯所在楼层,比如,电梯上升时,每经过一个楼层,则初始层数加1,电梯下降时,每经过一个楼层,则初始层数减1,需要注意的是,楼层识别模块自动将初始层数更新为当前识别到的楼层数。
87.第一开门模块,用于电梯如果到达出发楼层,控制电梯开门。
88.第一进退梯通信模块,用于电梯到达出发楼层后,通知对应的机器人进入电梯并接收机器人进梯完成信号;还用于电梯将机器人送往对应目标楼层后,通知对应的机器人退出电梯并接收机器人退梯完成信号。
89.第一关门模块,用于机器人进入电梯后,控制电梯关门。
90.点亮目标楼层键模块,用于激发点亮目标楼层对应的电梯楼层键。
91.目标楼层行驶模块,用于控制电梯行驶至目标楼层。
92.第二开门模块,用于电梯如果到达目标楼层,控制电梯开门。
93.第二关门模块,用于机器人完成退梯后控制电梯关门。
94.调试配置模块,用于安装调试人员对系统进行调试配置,系统各项运行参数可通过该模块进行配置,例如可运行最高楼层、可运行最低楼层、控制维持开门的时长等,也可通过运维调度平台链接运维通信模块进行远程配置。
95.信号采集模块,用于采集电梯运行信号并判断电梯状态;所述电梯状态包括:电梯开门、电梯关门、电梯上升、电梯下降、现所在楼层等。
96.亮键识别模块,用于识别电梯行驶至出发楼层中,出发楼层对应的电梯楼层键是否被消号和/或识别电梯行驶至目标楼层中,目标楼层对应的电梯楼层键是否被消号。
97.运维通信模块,用于将乘梯过程和电梯状态上传至运维调度平台,运维人员可通过运维调度平台监测电梯状态和乘梯过程,如果出现异常,可接入系统处理,比如:控制模块没有自动根据获取到的出发楼层和/或目标楼层点亮对应的电梯楼层键,运维人员可通过运维调度平台链接系统的网络模块通知控制模块点亮。运维人员也通过运维通信模块为系统进行异常处理和/或系统升级。
98.第一回应模块,用于将所述电梯状态发送给机器人,让机器人可根据电梯状态信息顺利完成乘梯任务。
99.433近场通信模块,指433mhz射频通信,利用射频进行信息传输,在没有网络的情况下也能够进行通信,在出现网络异常或网络信号差或无网络的情况时,可通过该模块与机器人进行通信,所述433近场通信模块包括:
100.第二获取模块,用于接收机器人发出的呼梯信号,获取机器人的出发楼层和目标楼层第二进以及机器人的编号和/或任务号;,实现在多个机器人乘梯时能够接送对应的机器人前往对应的目标楼层,避免错误通知机器人进出电梯。
101.第二进退梯通信模块,用于通知机器人进入电梯并接收机器人进梯完成信号以及通知机器人退出电梯并接收机器人退梯完成信号。
102.第二回应模块,用于将所述电梯状态发送给机器人,让机器人可根据电梯状态信息顺利完成乘梯任务。
103.实施例3
104.本发明实施例还提供一种电梯,如图3所示,该电梯包括上述实施例2中的机器人电梯控制系统和原电梯系统,原电梯系统为电梯厂商装入的初始电梯系统,用于普通用户正常搭乘电梯,所述的机器人电梯控制系统仅供机器人乘梯时使用,机器人电梯控制系统与原电梯系统相互独立,不影响普通用户正常使用电梯。
105.实施例4
106.本发明实施例还提供一种电子设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例1中所述的一种机器人电梯控制方法。
107.实施例5
108.本发明实施例还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现实施例1中所述的一种机器人电梯控制方法。
109.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。