1.本发明涉及工业机器人技术领域,尤其涉及一种五自由度大工作空间串并混联机器人。
背景技术:
2.目前,我国快递行业处于高速发展阶段,在分拣环节实现自动化是各个快递公司的一致追求,现在分拣领域所采用的自动化设备分为串联机器人和并联机器人,由于串联机器人的电机布置在远离基座的各个转动关节和机械臂上,导致机械臂结构复杂、自重大、惯量高、很难做到高速分拣;并联机器人作为多分支耦合机构,虽然能实现高速高精度运动,但其工作空间有限,难以适应物流分拣流水线的实际作业要求。
3.申请号为cn 215785053 u的专利提出了一种采用并联机器人的分拣方案,这种方案由于所提出并联机器人的结构限制,存在着工作空间小的问题,分拣品类有限,工作效果不佳;申请号为c n 216609065u的专利提出了一种scara机器人,这种机器人的采用串联结构,机器人的刚度较低,而多个电机布置在机械臂上,靠近机器人末端,使得机器人惯性高,速度不够高。
技术实现要素:
4.针对现有技术方案的不足,本发明的技术方案提供了一种五自由度大工作空间串并混联机器人。
5.本发明的技术方案提供的一种五自由度大工作空间串并混联机器人,包括基座、旋转平台、桁架、连接板、带轮传动转置、动平台、末端转台、末端执行器、五个电机以及并行安装在所述旋转平台与所述动平台之间的第一分支、第二分支;所述旋转平台通过转动副一与所述基座连接,由电机一驱动;电机一固连在所述基座上;所述桁架一端与所述旋转平台固连,所述桁架另一端与所述连接板固连;所述转动副一轴线与电机一输出轴共线,方向为竖直方向;
6.所述第一分支从所述基座到所述动平台顺序连接有电机三、连杆一,u型叉一、连杆三;所述电机三固连在所述旋转平台上;所述连杆一与所述电机三输出轴固连,与所述连接板通过转动副二连接,与所述u型叉一通过转动副三连接;所述连杆三与所述u型叉一通过转动副四连接,与所述动平台通过转动副十一连接;所述转动副二轴线与所述电机三输出轴共线,与转动副三轴线相互垂直并相交;转动副四与所述连杆三的中心线共线,转动副四与转动副三轴线垂直并相交,转动副四与转动副二轴线相交,转动副十一和转动副四轴线垂直;
7.所述第二分支从所述基座到所述动平台顺序连接有电机二、连杆二、带轮传动装置、连杆四;所述带轮传动装置包括u型叉二、u型叉三、带轮一、带轮二、张紧轮、导向轮、转动副七、转动副八、转动副九;所述电机二固连在所述旋转平台上;所述连杆二与所述电机二输出轴固连,与所述u型叉二通过转动副五连接,与所述带轮一固连;所述u型叉二与所述
连接板通过转动副六连接,与所述u型叉三通过转动副七相连;所述导向轮与所述u型叉二通过转动副八相连;所述张紧轮与所述u型叉二通过转动副九相连;所述带轮二与所述u型叉三固连;所述带轮一通过所述导向轮和所述传送带驱动所述带轮二;所述连杆四与所述u型叉三通过转动副十连接,与所述动平台通过转动副十二连接;所述转动副五轴线、转动副轴线、电机一输出轴三者共线;转动副七轴线与转动副六轴线垂直相交;转动副八轴线与转动副六轴线垂直;转动副九与转动副八的轴线垂直;转动副九与转动副六的轴线垂直;转动副十轴线与转动副七轴线垂直相交,与转动副六轴线相交;转动副十轴线与所述连杆四的中心线共线,与转动副十二轴线垂直;所述u型叉一、所述u型叉三、所述连杆三、所述连杆四、所述动平台、转动副二、转动副三、转动副四、转动副六、转动副七、转动副十、转动副十一、转动副十二共同构成平行四边形机构;
8.所述末端转台与电机四输出轴固连,与所述动平台通过转动副十三连接;电机五与所述末端转台固连;所述末端执行器与所述末端转台通过转动副十四连接,通过电机五驱动;所述转动副十三轴线与转动副十二轴线垂直;转动副十四轴线与转动副十三轴线垂直相交。
9.上述的一种五自由度大工作空间串并混联机器人,其特征在于:所述第二分支从所述基座到所述动平台顺序连接有所述电机二、所述连杆二、锥齿轮传动装置、所述连杆四;所述锥齿轮传动装置包括u型叉四、齿轮箱、锥齿轮一、锥齿轮二、转动副十五;所述齿轮箱与所述连接板通过转动副六连接,与所述u型叉四通过转动副十六连接;所述连杆二与所述齿轮箱通过转动副十五连接,与所述锥齿轮一固连;所述锥齿轮二与所述齿轮箱通过转动副十七连接,与所述u型叉四固连,与所述锥齿轮一相互啮合;所述u型叉四与所述连杆四通过转动副十连接;所述转动副十五的轴线与所述连杆二的中心线共线,与转动副十六和转动副十七的轴线垂直;转动副十六与转动副十七的轴线共线,与转动副十的轴线相互垂直;转动副十和转动副十五轴线相交;
10.进一步地,所述第一分支和所述第二分支相对位置为所述第一分支在所述第二分上方替换为所述第一分支在所述第二分下方。
11.本发明提供的技术方案带来的有益效果是:本发明提出一种五自由度大工作空间串并混联机器人,是一种混联结构,能实现三移两转五自由度运动。本机器人相较于串联scara机器人的重要优点在于采用桁架结构和闭环结构,有效较低了机械臂自重,同时又具备更高的刚度;不含有移动副,机械运动磨损少;主要电机布置在基座上方使得机器人惯性低更能实现高速运动;相较于并联机器人,工作空间大,更适合大范围的无序分拣作业。
附图说明
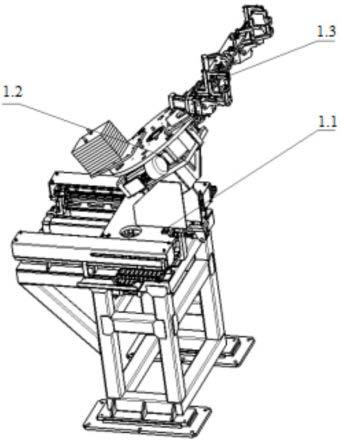
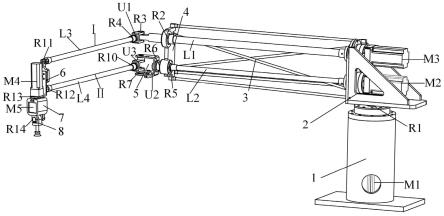
12.图1是本发明实施例1的一种五自由度大工作空间串并混联机器人的整体结构示意图;
13.图2是实施例1中带轮传动装置结构示意图;
14.图3是本发明实施例2的一种五自由度大工作空间串并混联机器人的锥齿轮传动装置结构示意图;
15.图4是图3的锥齿轮传动装置内部结构示意图;
16.图5是本发明实施例3的一种五自由度大工作空间串并混联机器人的整体结构示
意图。
17.图中:1-基座,2-旋转平台、3-桁架、4-连接板、5-带轮传动装置、6-动平台、7-末端转台、8-末端执行器、m1-电机一、m2-电机二、m3-电机三、m4-电机四、m5-电机五、l1-连杆一、l2-连杆二、l3-连杆三、l4-连杆四、r1-转动副一、r2-转动副二、r3-转动副三、r4-转动副四、r5-转动副五、r6-转动副六、r7-转动副七、r8-转动副八、r9-转动副九、r10-转动副十、r11-转动副十一、r12-转动副十二、r13-转动副十三、r14-转动副十四、r15-转动副十五、r16-转动副十六、r17-转动副十七、u1-u型叉一、u2-u型叉二、u3-u型叉三、u4-u型叉四、w1-带轮一、w2-带轮二、w3-张紧轮、w4-导向轮、h1-齿轮箱。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
19.实施例1
20.参考图1和图2,一种五自由度大工作空间串并混联机器人,包括基座(1)、旋转平台(2)、桁架(3)、连接板(4)、带轮传动转置(5)、动平台(6)、末端转台(7)、末端执行器(8)、五个电机以及并行安装在所述旋转平台(2)与所述动平台(6)之间的第一分支(ⅰ)、第二分支(ⅱ);所述电机一(m1)固连在所述基座(1)上;所述旋转平台(2)通过转动副一(r1)与基座(1)连接,由电机一(m1)驱动;所述桁架(3)两端分别固连旋转平台(2)和连接板(4);所述转动副一(r1)为驱动副;转动副一(r1)轴线与电机一(m1)输出轴共线,方向为竖直方向。
21.所述第一分支(ⅰ)从基座(1)到动平台(6)顺序连接有电机三(m3)、连杆一(l1),u型叉一(u1)、连杆三(l3);上述电机三(m3)固连在旋转平台(2)上;所述连杆一(l1)与电机三(m3)输出轴固连;所述连接板(4)与连杆一(l1)通过转动副二(r2)连接;所述u型叉一(u1)与连杆一(l1)通过转动副三(r3)连接;所述连杆三(l3)与u型叉一(u1)通过转动副四(r4)连接;所述动平台(6)与连杆三(l3)通过转动副十一(r11)连接;所述转动副二(r2)轴线与电机三(m3)输出轴共线并垂直相交于转动副一(r1)的轴线;所述转动副三(r3)与转动副二(r2)轴线相互垂直并相交;所述转动副四(r4)与连杆三(l3)的中心线共线;所述转动副四(r4)与转动副三(r3)轴线垂直并相交;所述转动副四(r4)与转动副二(r2)轴线相交;所述转动副十一(r11)和转动副四(r4)轴线垂直。
22.所述第二分支(ⅱ)从基座(1)到动平台(6)顺序连接有电机二(m2)、连杆二(l2),带轮传动装置(5),连杆四(l4);所述带轮传动装置(5)包括u型叉二(u2)、u型叉三(u3)、带轮一(w1)、带轮二(w2)、张紧轮(w3)、导向轮(w4)、转动副七(r7)、转动副八(r8)、转动副九(r9);上述电机二(m2)固连在旋转平台(2)上;连杆二(l2)与电机二(m2)输出轴固连;u型叉二(u2)与连杆二(l2)通过转动副五(r5)连接;连杆二(l2)与带轮一(w1)固连;所述带轮一(w1)由电机二(m2)驱动;u型叉二(u2)与连接板(4)通过转动副六(r6)连接;u型叉二(u2)与u型叉三(u3)通过转动副七(r7)相连;导向轮(w4)与u型叉二(u2)通过转动副八(r8)相连;张紧轮(w3)与u型叉二(u2)通过转动副九(r9)相连;带轮二(w2)与u型叉三(u3)固连;所述带轮一(w1)通过导向轮(w4)和传送带驱动带轮二(w2);连杆四(l4)与u型叉三(u3)通过转动副十(r10)连接;所述动平台(6)与连杆四(l4)通过转动副十二(r12)连接;所述转动副五(r5)轴线轴线和转动副一(r1)垂直并相交;所述转动副五(r5)轴线、转动副(r6)轴线、电机
一(m1)输出轴三者共线;转动副七(r7)轴线与转动副六(r6)轴线垂直相交;转动副八(r8)轴线与转动副六(r6)轴线垂直;转动副九(r9)与转动副八(r8)的轴线垂直;转动副九(r9)与转动副六(r6)的轴线垂直;转动副十(r10)轴线与转动副七(r7)轴线垂直相交;转动副十(r10)轴线与转动副六(r6)轴线相交;转动副十(r10)轴线与连杆四(l4)的中心线共线;转动副十二(r12)轴线与转动副十(r10)轴线垂直;所述u型叉一(u1)、u型叉三(u3)、连杆三(l3)、连杆四(l4)、动平台(6)、转动副二(r2)、转动副三(r3)、转动副四(r4)、转动副六(r6)、转动副七(r7)、转动副十(r10)、转动副十一(r11)、转动副十二(r12)共同构成平行四边形机构。
23.所述末端转台(7)与动平台(6)通过转动副十三(r13)连接,所述电机四(m4)固连在动平台(6)上驱动末端转台(7)旋转;电机五(m5)与末端转台(7)固连;末端执行器(8)与末端转台(7)通过转动副十四(r14)连接,通过电机五(m5)驱动;所述转动副十三(r13)轴线与转动副十二(r12)轴线垂直;转动副十四(r14)轴线与转动副十三(r13)轴线垂直相交。
24.实施例2:
25.实施例2与实施例1的区别在于:
26.参考图3和图4,第二分支(ⅱ)的带轮传动装置(5)替换成锥齿轮传动装置;所述锥齿轮传动装置包括u型叉四(u4)、齿轮箱(h1)、锥齿轮一(c1)、锥齿轮二(c2)、转动副十五(r15);上述齿轮箱(h1)与连接板(4)通过转动副六(r6)连接,与u型叉四(u4)通过转动副十六(r16)连接;连杆二(l2)与齿轮箱(h1)通过转动副十五(r15)连接,与锥齿轮一(c1)固连;锥齿轮二(c2)与齿轮箱(h1)通过转动副十七(r17)连接,与u型叉四(u4)固连,与锥齿轮一(c1)相互啮合;u型叉四(u4)与连杆四(l4)通过转动副十(r10)连接;所述转动副十五(r15)的轴线与连杆二(l2)的中心线共线,与转动副十六(r16)和转动副十七(r17)的轴线垂直;转动副十六(r16)与转动副十七(r17)的轴线共线,与转动副十(r10)的轴线相互垂直;转动副十(r10)和转动副十五(r15)轴线相交。
27.实施例3:
28.参考图5,实施例1与实施例2所述一种五自由度大工作空间串并混联机器人的第一分支(ⅰ)、第二分支(ⅱ)的位置布置替换成第一分支(ⅰ)在下方,第二分支(ⅱ)在上方。
29.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
30.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
31.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。