1.本实用新型属于磁滞制动器控制领域,具体涉及一种磁滞制动器控制电路。
背景技术:
2.现有技术下,磁滞制动器的控制电路结构比较简单,往往只具备单纯的电流控制功能,不能有效检测和显示磁滞制动器的运行参数,也不能灵活实现磁滞制动器的多种控制方式,不能满足更丰富的使用需求。
技术实现要素:
3.本实用新型要解决的技术问题在于克服现有技术中磁滞制动器控制电路不能有效检测和显示磁滞制动器的运行参数并且不能灵活控制磁滞制动器的缺陷,从而提供一种磁滞制动器的控制电路。
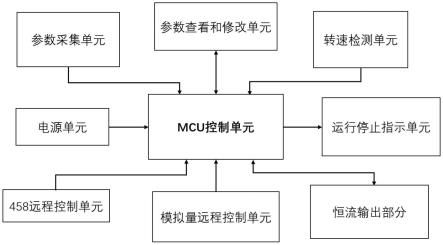
4.一种磁滞制动器控制电路,包括mcu控制单元,还包括参数查看和修改单元、转速检测单元、运行停止指示单元、参数采集单元、模拟量远程控制单元、恒流输出部分,分别与所述mcu控制单元连接;
5.所述参数查看和修改单元用于查看和修改磁滞制动器的运行参数;
6.所述转速检测单元用于检测磁滞制动器的转速,并传输到mcu控制单元;
7.所述运行停止指示单元用于指示磁滞制动器的运行和停止状态;
8.所述参数采集单元用于采集磁滞制动器的运行参数;
9.所述模拟量远程控制单元用于接受模拟量的远程控制;
10.所述恒流输出部分用于接受mcu控制单元的控制并为磁滞制动器提供驱动电源。
11.进一步的,还包括485远程控制单元,所述485远程控制单元用于通过rs-485协议远程控制mcu控制单元。
12.进一步的,所述参数采集单元包括千分比采集模块、功率采集模块、扭矩采集模块中的一个或多个模块。
13.进一步的,所述参数查看和修改单元包括千分比设置模块、转速显示模块、功率显示模块、扭矩显示模块、电流显示模块、485通讯地址设置模块和外部模拟量控制设置模块中的一个或多个模块。
14.进一步的,所述恒流输出部分包括电流采集单元,用于采集电流数据并输出到mcu控制单元。
15.进一步的,所述运行停止指示单元包括发光二极管,所述发光二极管一端连接电源,另一端连接mcu控制单元的mcu管脚。
16.进一步的,所述转速检测单元包括安装在磁滞制动器上的霍尔传感器,所述霍尔传感器信号输出到所述mcu控制单元。
17.进一步的,所述参数查看和修改单元包括led数码管,用于显示运行参数。
18.有益效果:
19.1.本实用新型通过mcu控制单元、参数修改和查看单元、转速检测单元、运行停止指示单元、参数采集单元、模拟量远程控制单元、恒流输出部分的配合设置,mcu控制单元控制恒流输出部分输出驱动磁滞制动器的电源,实现磁滞制动器的驱动;并且能够通过参数采集单元有效采集的磁滞制动器的运行参数,并通过mcu控制单元控制参数查看和修改模块实现磁滞制动器的运行参数修改和查看;通过运行停止指示模块的设置能够直观反映出磁滞制动器的运行停止状态;通过模拟量远程控制单元的设置能够用模拟量对磁滞制动器的进行远程控制。本实用新型在有效驱动磁滞制动器的基础上,检测并显示其运行参数,并且能通过多种方式切换灵活控制,提高了工作效率。
20.2.本实用新型通过485远程控制单元的设置,实现了rs-485协议下对磁滞制动器的远程控制;通过电流采集单元的设置,将恒流输出部分产生的驱动电流数据采集到mcu控制单元,方便电流数据的计算以及显示。
21.3.本实用新型通过运行停止单元设置发光二极管,结构简单,操作人员能够通过观察发光二极管的发光情况直接判断磁滞制动器的工作状态。通过参数查看和修改单元设置led数码管,能够方便展示出磁滞制动器的运行参数,并且控制简单,消耗资源少;通过霍尔传感器的设置,霍尔传感器检测到磁滞制动器的转动并输出脉冲信号到mcu控制单元,能够计算获得转速数据。
附图说明
22.图1为本实用新型的整体结构示意图;
23.图2为本实用新型mcu控制单元的电路结构示意图;
24.图3为本实用新型485远程控制单元的电路结构示意图;
25.图4为本实用新型参数查看和修改单元led数码管的电路结构示意图;
26.图5为本实用新型参数查看和修改单元按键的电路结构示意图;
27.图6为本实用新型运行停止指示单元的电路结构示意图。
具体实施方式
28.为了使本领域的技术人员更好地理解本技术中的技术方案,下面将结合本技术实施例中的附图对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
29.参照图1所示,本实施例提供了一种磁滞制动器控制电路,包括mcu控制单元,还包括参数查看和修改单元、转速检测单元、运行停止指示单元、参数采集单元、模拟量远程控制单元、恒流输出部分,分别与所述mcu控制单元连接;所述参数查看和修改单元用于查看和修改磁滞制动器的运行参数;所述转速检测单元用于检测磁滞制动器的转速,并传输到mcu控制单元;所述运行停止指示单元用于指示磁滞制动器的运行和停止状态;所述参数采集单元用于采集磁滞制动器的运行参数;所述模拟量远程控制单元用于接受模拟量的远程控制;所述恒流输出部分用于接受mcu控制单元的控制并为磁滞制动器提供驱动电源。
30.具体来说,参照图2所示所述mcu控制单元包括mcu芯片,所述mcu芯片包括有jtag
协议的烧录接口,用于将控制程序烧录到mcu芯片中。所述mcu芯片的型号为stm32f103c8t6。
31.所述参数采集单元包括千分比采集模块、功率采集模块和扭矩采集模块,模块分别与所述mcu芯片的引脚连接,将检测到的运行参数传输到mcu芯片。所述千分比采集模块、功率采集模块和扭矩采集模块均为常规技术,不详述。
32.所述参数查看和修改单元包括七个参数修改和控制页面,分别记为p1~p7,并分别对应七个模块,所述p1为千分比设置模块、p2为转速显示模块、p3为功率显示模块、p4为扭矩显示模块、p5为电流显示模块,p6为485通讯地址设置模块,p7为外部模拟量控制设置模块。
33.通过远程模拟量控制单元,能够用模拟量对mcu芯片进行远程控制从而实现对磁滞制动器的控制,所述模拟量可以是模拟电压。
34.参照图4和图5所示,所述参数查看和修改单元包括三位数码管和按键;所述三位数码管为型号为3631的共阳数码管,与mcu芯片的引脚连接,能够显示三位带小数点的数字或字母;所述按键一端接地,另一端分别连接所述mcu芯片的不同引脚;通过按下按键能够切换不同模块对应页面的运行参数显示,并且能够对部分对应参数进行设置。
35.参照图6所示,所述运行停止指示包括发光二极管,所述发光二极管正极经过限流电阻连接3.3v电源,负极连接mcu芯片上的引脚。
36.所述转速检测电源包括霍尔传感器,霍尔传感器安装在磁滞制动器上,检测到磁滞制动器的转动并输出脉冲信号到mcu控制单元,能够计算获得转速数据。
37.所述恒流输出部分包括电流采集单元,用于将恒流输出部分产生的驱动电流数据采集到mcu芯片。
38.作为本实施例的进一步改进,参照图3所示,还包括485远程控制单元,包括型号为max13487e的半双工rs-485收发器,并将485信号经过限流稳压电路连接到mcu芯片,能够实现rs-485协议下对磁滞制动器的远程控制。
39.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。