1.本发明属于多旋翼无人机飞行控制技术领域,具体提出了一种多旋翼无人机自主巡航及充电的控制方法。
背景技术:
2.目前多旋翼无人机技术发展迅速,应用场景也越来越丰富,其中之一就是巡航任务。但是由于续航问题,导致无法实现长时间、远距离的巡航,并且随着巡航无人机的数量增加,人工成本也大大增加,因此多旋翼无人机的自主充电控制系统也是一个重要的发展方向。传统的多旋翼自主充电站通常是装有井字型的无人机位置校正机构,用于当无人机降落到充电平台上后,将无人机的航向转动到固定方向,并将无人机位置移动到平台的固定位置,方便充电装置设计。而本发明的充电站不安装无人机位置校正机构,直接通过充电站上的机械臂进行充电接头的对接,然后实现充电的过程。
技术实现要素:
3.本发明的目的:在多架巡航任务的无人机的飞行范围内上布置多台充电站,可以满足它们在巡航任务中,无需返回基地充电,即可完成长时间、长里程的巡航任务,提出了一种多旋翼无人机自主巡航及充电的控制方法。
4.本发明的技术方案:为了实现这些目的,本发明提出的一种多旋翼无人机自主巡航及充电的控制方法,包括以下步骤:
5.s1、无人机根据内部存储的航线,按航线执行巡航任务;
6.s2、读取无人机电量,若电量充足,跳转至所述步骤s1,若电量不足,则执行所述步骤s3;
7.s3、无人机读取在通讯范围内的所有充电站的坐标,将无人机与各个充电站的距离按照从近到远的顺序排序,形成充电站列表;
8.s4、无人机保存当前巡航任务的断点坐标pb;
9.s5、无人机从充电站列表中依次取出目标充电站,同时向目标充电站发出充电请求,若该目标充电站无空闲充电位置,则该目标充电站回复无人机拒绝充电的请求,然后从充电站列表中取下一个目标充电站,无人机继续发送请求,直至有充电站同意充电请求,同时保存该充电站的坐标pt,则无人机执行所述步骤s6;
10.s6、无人机自动飞到坐标pt处的上方,并由视觉引导精准降落在充电平台上;
11.s7、无人机加锁;
12.s8、无人机向目标充电站发送充电请求,目标充电站收到充电请求后自动向无人机充电;
13.s9、无人机不断读取充电状态,等待充电完成;
14.s10、无人机向目标充电站发送离开请求,等待充电站同意,充电站收到请求后,将机械臂回收到仓内,然后充电站向无人机发送同意离开的指令;
15.s11、无人机解锁;
16.s12、无人机飞到断点坐标pb位置;
17.s13、无人机继续从断点处继续执行巡航任务,跳转至所述步骤s1。
18.进一步的,步骤s2中,当无人机电量不足以飞至充电站时,解决方案:实时读取自身电量以及无人机与周边各充电站之间的距离,电量不足的判断条件是:通过剩余电量估计无人机可以飞行的距离,若此距离小于无人机与邻近充电站之间的最大距离,即视为电量不足;所述邻近充电站指的是无人机通讯范围内的充电站。
19.进一步的,步骤s5中,若通讯范围内的所有充电站均不同意充电请求,则无人机就近降落等待并继续循环执行s5直至有充电站同意充电为止。
20.进一步的,在所述步骤s1中,无人机内部存储的航线通常是在起飞前由操作人员通过地面站上传,并在整个巡航任务中一直保存在飞控内部。
21.进一步的,在所述步骤s2中,飞控读取电池的剩余电量,若电量充足,则继续执行巡航任务,当电量不足时,则执行所述步骤s3。
22.进一步地,在所述步骤s3中,飞控通过无线链路连接通讯范围内的所有充电站,读取他们的地理坐标,并根据无人机当前的位置,计算无人机与各个充电站的距离,然后根据距离由近到远进行排序,形成充电站列表。
23.进一步地,其中无线链路的通讯半径要大于充电站之间的距离的一半。
24.进一步地,在所述步骤s4中,飞控从充电站列表中,取出最靠前的充电站作为目标充电站,并向该充电站发出充电请求,若该充电站同意请求,则无人机前往该充电站充电,若该充电站拒绝请求,则无人机从充电站列表中,取出下一个充电站作为目标充电站,然后继续执行此步骤,直到有充电站同意请求。
25.进一步地,充电站是否同意无人机的充电请求,是根据该充电站内是否有空闲的可用的充电位数目决定的,若有则同意请求,若无则拒绝请求。
26.进一步地,当充电站同意了其中一个无人机的充电请求,不论无人机是否到达该充电站,充电站都要将空闲状态设置为繁忙,否则可能导致最后一个空位刚分配给一架无人机后,立马有另一架无人机发送充电请求时,导致错误的回复。
27.进一步地,在所述步骤s5中,无人机将当前所在位置设置为巡航任务的断点pb,以供任务恢复时使用。
28.进一步地,在所述步骤s6中,无人机飞到充电站所给的坐标的上方,然后启用视觉识别充电站空位的位置,闭环降落在充电站的空闲充电位上。
29.进一步地,在所述步骤s7中,无人机加锁,为了保证在充电的过程中不会出现旋翼转动。
30.进一步地,在所述步骤s8中,当无人机检测降落完成后,无人机向充电站发送充电请求,充电站再执行充电工作。
31.进一步地,在所述步骤s10中,当充电完成后,无人机向充电站发送离开请求,这时充电站先执行无人机离开前的准备工作,然后再同意其离开。
32.进一步地,在所述步骤s12中,无人机飞到断点坐标pb处,为继续执行巡航任务做准备。
33.本发明的有益效果:在多架巡航任务的无人机的航线上布置多台充电站,并使用
该方法进行无人机的巡航和自主充电的控制流程,可以满足它们自主完成巡航任务,且无需返回基地充电,即可完成长时间、长里程的巡航;本发明支持多架无人机同时巡航,多台充电站在巡航航线上可以任意布置,无特定场地要求。本发明提出的充电控制方法中,通过无人机与充电站距离关系确判断剩余电量的方法,可以有效避免采用固定阈值确定无人机电量不足导致难以达到充电站的情形。
34.无人机执行巡航任务中,由于电量不足导致续航任务中断,需要充电时,对于多个充电站还可以进行择优选择,充电过程中,引入断点坐标能保证在充电完成后的巡航任务的连续性。与此同时,通过无人机与充电站之间的指令协调控制,在无人机起降过程中,有效消除了充电站机械臂收放过程中的对无人机带来的安全隐患。在充电请求阶段,克服了多架无人机同时请求一个充电站充电的协调问题。
35.本发明适用范围广,与无人机内部存储所有充电站坐标的方式相比,既适用于航线上充电站事先布置的环境;还适用于充电站数量、位置随机变化的巡航环境,可通过动态的获取充电站坐标,实时查找合适的充电站完成充电续航,无需定时手动更新无人机内部存储的充电站坐标。
附图说明
36.图1为多架多旋翼无人机与多个充电站协同工作的示意图,
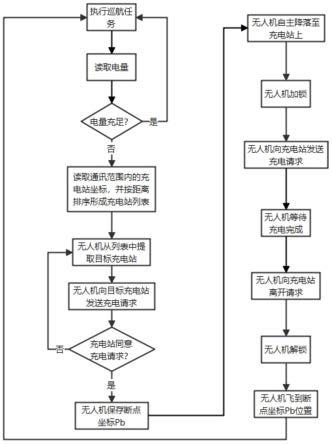
37.图2为多旋翼无人机自主巡航及充电方法的流程图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.参见附图2,本发明具体提出的一种多旋翼无人机自主巡航及充电的控制方法,包括以下步骤:
40.第一步、无人机根据内部存储的航线,按航线执行巡航任务;
41.第二步、读取无人机电量,若电量充足,跳转至所述步骤1,若电量不足,则执行所述步骤3;
42.第三步、无人机读取在通讯范围内的所有充电站的坐标,将无人机与各个充电站的距离按照从近到远的顺序排序,形成充电站列表;
43.第四步、无人机保存当前巡航任务的断点坐标pb;
44.第五步、无人机从充电站列表中依次取出目标充电站,同时向目标充电站发出充电请求,若该目标充电站无空闲充电位置,则该目标充电站回复无人机拒绝充电的请求,然后从充电站列表中取下一个目标充电站,无人机继续发送请求,直至有充电站同意充电请求,同时保存该充电站的坐标pt,则无人机执行所述步骤6;
45.第六步、无人机自动飞到坐标pt处的上方,并由视觉引导精准降落在充电平台上;
46.第七步、无人机加锁;
47.第八步、无人机向目标充电站发送充电请求,目标充电站收到充电请求后自动向
无人机充电;
48.第九步、无人机不断读取充电状态,等待充电完成;
49.第十步、无人机向目标充电站发送离开请求,等待充电站同意,充电站收到请求后,将机械臂回收到仓内,然后充电站向无人机发送同意离开的指令;
50.第十一步、无人机解锁;
51.第十二步、无人机飞到断点坐标pb位置;
52.第十三步、无人机继续从断点处继续执行巡航任务,跳转至所述步骤1。
53.在具体执行以上控制方法时,上述方法步骤2中,当无人机电量不足以飞至充电站时,解决方案:实时读取自身电量以及无人机与周边各充电站之间的距离,电量不足的判断条件是:通过剩余电量估计无人机可以飞行的距离,若此距离小于无人机与邻近充电站之间的最大距离,即视为电量不足;所述邻近充电站指的是无人机通讯范围内的充电站。
54.在具体执行以上控制方法时,在所述步骤2中,飞控读取电池的剩余电量,若电量充足,则继续执行巡航任务,当电量不足时,则执行所述步骤3。特别的,在所述步骤3中,飞控通过无线链路连接通讯范围内的所有充电站,读取他们的地理坐标,并根据无人机当前的位置,计算无人机与各个充电站的距离,然后根据距离由近到远进行排序,形成充电站列表。
55.在具体执行以上控制方法时,在所述步骤4中,飞控从充电站列表中,取出最靠前的充电站作为目标充电站,并向该充电站发出充电请求,若该充电站同意请求,则无人机前往该充电站充电,若该充电站拒绝请求,则无人机从充电站列表中,取出下一个充电站作为目标充电站,然后继续执行此步骤,直到有充电站同意请求。在具体执行以上控制方法时,步骤5中,若通讯范围内的所有充电站均不同意充电请求,则无人机就近降落等待并继续循环执行5直至有充电站同意充电为止。充电站是否同意无人机的充电请求,是根据该充电站内是否有空闲的可用的充电位数目决定的,若有则同意请求,若无则拒绝请求。在一些特殊的应用场景中,可能存在若干无人机占用邻近充电站的情况;当充电站同意了其中一个无人机的充电请求,不论无人机是否到达该充电站,充电站都要将空闲状态设置为繁忙,否则可能导致最后一个空位刚分配给一架无人机后,立马有另一架无人机发送充电请求时,导致错误的回复。
56.在具体执行以上控制方法时,当无人机检测降落完成后,无人机向充电站发送充电请求,充电站再执行充电工作。当充电完成后,无人机向充电站发送离开请求,这时充电站先执行无人机离开前的准备工作,然后再同意其离开。无人机飞到断点坐标pb处,为继续执行巡航任务做准备。在多架巡航任务的无人机的航线上布置多台充电站,并使用该方法进行无人机的巡航和自主充电的控制流程,可以满足它们自主完成巡航任务,且无需返回基地充电,即可完成长时间、长里程的巡航;本发明支持多架无人机同时巡航,多台充电站在巡航航线上可以任意布置,无特定场地要求。本发明提出的充电控制方法中,通过无人机与充电站距离关系确判断剩余电量的方法,可以有效避免采用固定阈值确定无人机电量不足导致难以达到充电站的情形。无人机执行巡航任务中,由于电量不足导致续航任务中断,需要充电时,对于多个充电站还可以进行择优选择,充电过程中,引入断点坐标能保证在充电完成后的巡航任务的连续性。与此同时,通过无人机与充电站之间的指令协调控制,在无人机起降过程中,有效消除了充电站机械臂收放过程中的对无人机带来的安全隐患。在充
电请求阶段,克服了多架无人机同时请求一个充电站充电的协调问题。本发明适用范围广,与无人机内部存储所有充电站坐标的方式相比,既适用于航线上充电站事先布置的环境;还适用于充电站数量、位置随机变化的巡航环境,可通过动态的获取充电站坐标,实时查找合适的充电站完成充电续航,无需定时手动更新无人机内部存储的充电站坐标。
57.以上所述,仅为本发明的具体实施例,对本发明进行详细描述,未详尽部分为常规技术。但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。