1.本发明涉及机器人领域,更具体地说,涉及用于四足机器人空中位姿调整的喷气控制系统及方法。
背景技术:
2.机器人技术的出现与快速发展成为二十世纪以来人类取得的最重要的成就之一。机器人在一些行业领域内甚至能够完全的取代人类做一些繁琐、枯燥无味的劳动,可以夜以继日的不停工作,甚至可以在极端严酷、极度危险的环境中作业,它在一定程度上解放了人类的双手,同时也在继续探索和拓宽人类的视野,为人类社会的发展起到积极的推动作用,所以,机器人在实际生活和科研当中将会有更深入的应用和更美好前景。
3.四足机器人因其良好的承载能力、较高的稳定性及较强的环境适应性,在救灾、勘探、军事、娱乐等方面具有巨大的应用前景,受到了国内外学者的广泛关注。目前四足机器人的研究已经取得了丰硕的成果。相比于轮式机器人,四足机器人在崎岖地面和障碍物较多的环境中有着更好的移动性能。通过落脚点的自由选择,可以让它们在移动时克服与其腿长相当的障碍物。
4.基于上述,本发明人发现:
5.在四足机器人移动过程时,如果在移动路线中出现沟壑,且无法通过四足机器人正常行走或简单跨越而通过沟壑时,则需要进行沟壑绕路,这样即可造成了四足机器人的使用不便。
6.于是,有鉴于此,针对现有的结构予以研究改良,提供用于四足机器人空中位姿调整的喷气控制系统及方法,以期达到更具有更加实用价值性的目的。
技术实现要素:
7.1.要解决的技术问题
8.针对现有技术中存在的问题,本发明的目的在于提供用于四足机器人空中位姿调整的喷气控制系统及方法,它可以实现对四足机器人的空中姿态进行实时调整,并可对四足机器人提供跳跃的动力,使四足机器人在遇到有沟壑的地面时可以轻松通过,为四足机器人提供了极大的便利。
9.2.技术方案
10.为解决上述问题,本发明采用如下的技术方案。
11.用于四足机器人空中位姿调整的喷气控制系统,包括四足机器人设备和机器人控制系统,所述四足机器人设备包括机器人主体、四个活动足和喷气组件,所述机器人控制系统包括主控制器、通信模块和探测模块;
12.四个所述活动足分别活动连接于机器人主体的两个侧面,所述喷气组件设置于机器人主体的正下方;
13.所述主控制器和通信模块均固定于机器人主体内部,所述探测模块分布于机器人
主体上,并与主控制器信号连接。
14.进一步的,所述喷气组件包括机械手和喷气式设备,所述机械手的顶端与机器人主体的底端固定,所述机械手的底端与喷气式设备固定。
15.进一步的,所述探测模块包括摄像头、红外测距传感器,所述摄像头固定于探测模块的前端,所述红外测距传感器装载于四足机器人设备底端腹部的前端位置。
16.用于四足机器人空中位姿调整的喷气控制方法,其具体步骤如下;
17.步骤s1:主控制器控制四足机器人配合四个活动足移动;
18.步骤s2:探测模块检测路线并判定是否存在沟壑,进行判定主控制器是否控制四足机器人配合四个活动足斜向上跃起;
19.步骤s3:当存在沟壑时,四足机机器人跳起,探测模块探测沟壑规格和四足机器人的当前高度;
20.步骤s4:当腹部搭载的喷气式设备探测到可通过自身腿部力量跳跃过去,喷气式设备在四足机器人起跳过程中不工作;
21.步骤s5:当腹部搭载的喷气式设备探测到无法通过自身腿部力量跳跃过去,喷气式设备根据四足机器人当前的空中姿态计算喷气角度进行喷气,给四足机器人继续跃起提供动力;
22.步骤s6:基于步骤s4和步骤s5,当四足机器人成功跃起一段时间后,喷气式设备调整喷气角度,改变四足机器人的空中姿态,促使四足机器人以最佳落地姿态下落;
23.步骤s7:四足机器人下落到离地面一定距离时,喷气式设备调整喷气角度,竖直向下喷气,减缓四足机器人下落速度,促使四足机器人平稳落地;
24.步骤s8:四足机器人落地以后,喷气式设备收缩,使四足机器人趴在地面上。
25.进一步的,所述步骤s2中,主控制器控制四个活动足斜向上跳跃,并控制斜向上的跳跃角度。
26.进一步的,所述步骤s5中,在喷气式设备机械能进行喷气时,机械手初次控制喷气式设备的喷气角度。
27.进一步的,所述步骤s6中,在四足机器人进行空中跳跃时,判定四足机器人的跳跃姿态,机械手再次控制喷气式设备的喷气角度,具体判定和操作方法如下:
28.假设此时机身平面与水平面的夹角为γ,将质心与机身前端中点连线的中点记为q1,质心与机身后端中点连线的中点记为q2,此时分为两种情况:
29.当四足机器人向前倾斜,即头部低于尾部,此时调整喷气角度为通过q1竖直向上喷气,直至四足机器人机身水平;
30.当四足机器人向后倾斜,即头部高于尾部,此时调整喷气角度为通过q2竖直向上喷气,直至四足机器人机身水平。
31.进一步的,所述步骤s7中,红外测距传感器运用三角测量方法,红外发射器发射的红外光束遇到地面时反射,反射回来的红外光束被ccd检测器检测到,根据光的反射定律以及三角关系计算出地面到四足机器人的距离s,具体计算公式如下:
[0032][0033]
式中,l为ccd检测器检测到被反射的红外光束产生的偏移值,x为红外发射器中心
线与ccd检测器中心线之间的距离,f为滤镜的焦距,α为入射角度。
[0034]
进一步的,所述步骤s8中,机械手控制喷气式设备收缩,并保证枕喷气式设备在四个活动足之间处于悬空状态。
[0035]
3.有益效果
[0036]
相比于现有技术,本发明的优点在于:
[0037]
本方案,在四足机器人移动过程中,探测模块可探测四足机器人行进路线上是否存在沟壑,此时主控制器控制四个活动足跳跃,然后通过机械手控制喷气式设备的角度,同时利用喷气式设备增强四足机器人的跳跃能力,在四足机器人落地过程中,喷气式设备调整喷气角度,改变四足机器人的空中姿态,促使四足机器人以最佳落地姿态下落,并保证四足机器人平稳落地,该控制方法可实现对四足机器人的空中姿态进行实时调整,并可对四足机器人提供跳跃的动力,使四足机器人在遇到有沟壑的地面时可以轻松通过,为四足机器人提供了极大的便利。
附图说明
[0038]
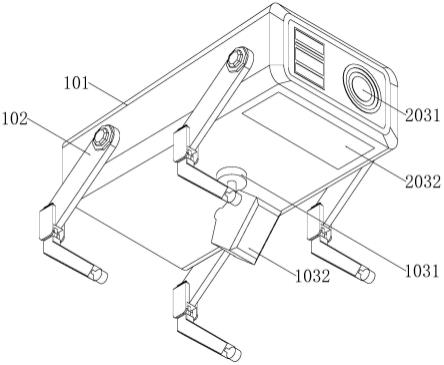
图1为本发明的四足机器人的立体结构示意图一;
[0039]
图2为本发明的四足机器人的立体结构示意图二;
[0040]
图3为本发明的控制系统的系统示意图;
[0041]
图4为本发明的控制方法的流程示意图。
[0042]
图中标号说明:
[0043]
1、四足机器人设备;101、机器人主体;102、活动足;103、喷气组件;1031、机械手;1032、喷气式设备;
[0044]
2、机器人控制系统;201、主控制器;202、通信模块;203、探测模块;2031、摄像头;2032、红外测距传感器。
具体实施方式
[0045]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
实施例1:
[0047]
请参阅图1-3,用于四足机器人空中位姿调整的喷气控制系统,包括四足机器人设备1和机器人控制系统2,四足机器人设备1包括机器人主体101、四个活动足102和喷气组件103,机器人控制系统2包括主控制器201、通信模块202和探测模块203;
[0048]
四个活动足102分别活动连接于机器人主体101的两个侧面,喷气组件103设置于机器人主体101的正下方;
[0049]
主控制器201和通信模块202均固定于机器人主体101内部,探测模块203分布于机器人主体101上,并与主控制器201信号连接;
[0050]
机器人主体101用于承载主控制器201、通信模块202以及其他电气元件,四个活动足102用于带动四足机器人设备1移动,喷气组件103用于控制四足机器人设备1在空中的位
姿调整,同时,位于机器人主体101内部的主控制器201进行四足机器人设备1的活动操控,通信模块202用于进行四足机器人设备1与外部控制器之间的信号连接,探测模块203用于检测四足机器人设备1的周边环境、四个活动足102和喷气组件103的工作状态,便于根据实际情况进行适应性调整。
[0051]
参阅图1和图2,喷气组件103包括机械手1031和喷气式设备1032,机械手1031的顶端与机器人主体101的底端固定,机械手1031的底端与喷气式设备1032固定;
[0052]
利用机械手1031控制喷气式设备1032的喷气方向,然后利用喷气式设备1032控制四足机器人设备1的空中位姿。
[0053]
参阅图1和图2,探测模块203包括摄像头2031、红外测距传感器2032,摄像头2031固定于探测模块203的前端,红外测距传感器2032装载于四足机器人设备1底端腹部的前端位置;
[0054]
摄像头2031用于检测四足机器人设备1行进路线上是否存在沟壑,红外测距传感器2032可发射红外光束,并运用三角测量方法,测量四足机器人与地面的距离,进而判定四足机器人设备1是否可通过自身腿部力量跳跃沟壑。
[0055]
实施例2:
[0056]
参阅实施例1,做进一步描述。
[0057]
参阅图4,用于四足机器人空中位姿调整的喷气控制方法,其具体步骤如下;
[0058]
步骤s1:主控制器控制四足机器人配合四个活动足移动;
[0059]
步骤s2:探测模块检测路线并判定是否存在沟壑,进行判定主控制器是否控制四足机器人配合四个活动足斜向上跃起;
[0060]
步骤s3:当存在沟壑时,四足机机器人跳起,探测模块探测沟壑规格和四足机器人的当前高度;
[0061]
步骤s4:当腹部搭载的喷气式设备探测到可通过自身腿部力量跳跃过去,喷气式设备在四足机器人起跳过程中不工作;
[0062]
步骤s5:当腹部搭载的喷气式设备探测到无法通过自身腿部力量跳跃过去,喷气式设备根据四足机器人当前的空中姿态计算喷气角度进行喷气,给四足机器人继续跃起提供动力;
[0063]
步骤s6:基于步骤s4和步骤s5,当四足机器人成功跃起一段时间后,喷气式设备调整喷气角度,改变四足机器人的空中姿态,促使四足机器人以最佳落地姿态下落;
[0064]
步骤s7:四足机器人下落到离地面一定距离时,喷气式设备调整喷气角度,竖直向下喷气,减缓四足机器人下落速度,促使四足机器人平稳落地;
[0065]
步骤s8:四足机器人落地以后,喷气式设备收缩,使四足机器人趴在地面上。
[0066]
参阅图4,步骤s2中,主控制器控制四个活动足斜向上跳跃,并控制斜向上的跳跃角度;
[0067]
在起跳阶段,通过d-h法对四足机器人建立坐标系,在四足机器人身体的几何正中心建立身体坐标系{h},在每条腿的髋关节建立坐标系{o},则
[0068][0069]
p0=[x
0 y
0 z
0 1]
t
=n*p
[0070]
其中,n为身体坐标系到髋关节坐标系的转换矩阵;dis
x
为前两腿髋关节间距;disy为同侧两腿髋关节间距;p为足端在身体坐标系下的坐标;p0为足端在髋关节坐标系下的坐标;
[0071]
建立起跳阶段腿部关节坐标系如图4所示,得到髋关节在基坐标的转换矩阵
[0072][0073]
通过逆运动学解得关节角度
[0074][0075][0076]
其中,l1为大腿长度,l2为小腿长度。
[0077]
参阅图4,步骤s5中,在喷气式设备机械能进行喷气时,机械手初次控制喷气式设备的喷气角度;
[0078]
四足机器人跳起后,根据跳跃的特点,此时四足机器人机身平面与地面水平,将四足机器人前方两腿足端连线中点记为m,后方足端连线中点记为n,m、n连线所在的竖直平面与前方沟壑前端交与p点,则喷气角度
[0079]
β=β
1-β2[0080]
并且喷气方向经过四足机器人机身质心,直至四足机器人质心与p点的连线垂直于地面;
[0081]
其中,β1为p、n连线与竖直方向夹角;β2为p、m连线与竖直方向夹角。
[0082]
参阅图4,步骤s6中,在四足机器人进行空中跳跃时,判定四足机器人的跳跃姿态,机械手再次控制喷气式设备的喷气角度,具体判定和操作方法如下:
[0083]
假设此时机身平面与水平面的夹角为γ,将质心与机身前端中点连线的中点记为q1,质心与机身后端中点连线的中点记为q2,此时分为两种情况:
[0084]
当四足机器人向前倾斜,即头部低于尾部,此时调整喷气角度为通过q1竖直向上喷气,直至四足机器人机身水平;
[0085]
当四足机器人向后倾斜,即头部高于尾部,此时调整喷气角度为通过q2竖直向上喷气,直至四足机器人机身水平;
[0086]
控制四足机器人在空中的位姿处于机身水平,保证四足机器人的跳跃稳定。
[0087]
参阅图4,步骤s7中,红外测距传感器运用三角测量方法,红外发射器发射的红外光束遇到地面时反射,反射回来的红外光束被ccd检测器检测到,根据光的反射定律以及三角关系计算出地面到四足机器人的距离s,具体计算公式如下:
[0088][0089]
式中,l为ccd检测器检测到被反射的红外光束产生的偏移值,x为红外发射器中心线与ccd检测器中心线之间的距离,f为滤镜的焦距,α为入射角度;
[0090]
利用红外测距传感器可实时监测四足机器人的离地距离,进而根据离地距离控制喷气式设备的工作状态。
[0091]
参阅图4,步骤s8中,机械手控制喷气式设备收缩,并保证枕喷气式设备在四个活动足之间处于悬空状态;
[0092]
控制喷气式设备的高度,可有效避免在四足机器人运动过程中造成对喷气式设备的碰撞,实现了对喷气式设备的保护作用。
[0093]
在使用时:
[0094]
在进行四足机器人设备1工作时,首先利用通信模块202进行四足机器人设备1与外部控制器之间的信号连接,机器人主体101内部的主控制器201控制四足机器人设备1配合四个活动足102移动,在移动过程中,探测模块203中的摄像头2031检测路线并判定是否存在沟壑,进行判定主控制器201是否控制四足机器人设备1配合四个活动足102斜向上跃起,当存在沟壑时,四足机机器人斜向上跃起,并控制斜向上的跳跃角度,同时探测模块203探测沟壑规格和四足机器人设备1的当前高度,此时进行四足机器人设备1的状态判定:
[0095]
当腹部搭载的喷气式设备1032探测到可通过自身腿部力量跳跃过去,喷气式设备1032在四足机器人设备1起跳过程中不工作;
[0096]
当腹部搭载的喷气式设备1032探测到无法通过自身腿部力量跳跃过去,喷气式设备1032根据四足机器人设备1当前的空中姿态计算喷气角度进行喷气,喷气组件103中的机械手1031初次控制喷气式设备1032的喷气角度,给四足机器人设备1继续跃起提供动力;
[0097]
当四足机器人设备1成功跃起一段时间后,红外测距传感器2032运用三角测量方法,红外发射器发射的红外光束遇到地面时反射,反射回来的红外光束被ccd检测器检测到,根据光的反射定律以及三角关系计算出地面到四足机器人的距离,此时喷气式设备1032调整喷气角度,改变四足机器人设备1的空中姿态,保证四足机器人设备1的机身平稳,促使四足机器人设备1以最佳落地姿态下落,在四足机器人设备1下落到离地面一定距离时,喷气式设备1032调整喷气角度,竖直向下喷气,减缓四足机器人设备1下落速度,促使四足机器人设备1平稳落地,四足机器人设备1落地以后,喷气式设备1032收缩,使四足机器人设备1趴在地面上,此时机械手1031控制喷气式设备1032收缩,并保证枕喷气式设备1032在四个活动足102之间处于悬空状态;
[0098]
这样即可完成对四足机器人设备1的控制,并实现四足机器人设备1空中位姿的调整。
[0099]
以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。