1.本发明属于无人机精确着陆控制领域,具体涉及一种无人机自主降落延时补偿控制方法,特别适用于小型无人机着陆控制。
背景技术:
2.电动垂直起降无人机快速发展,应用在很多领域。在自主执行任务过程,往往需要在指定地点精确着陆,比如快递运输末端。精确着陆过程,基于多传感器融合进行探测感知,传感器包括摄像头、超声波传感器、激光传感器等,再经过计算处理,解算出目标位置。多传感器融合加解算传输,不可避免带来延时,延时又带来了控制滞后,造成降落过程中无人机位置振荡,降落过程耗时增加,降落失败概率增大。
3.目前国内关于延时补偿控制技术中,专利cn112099532a公开了一种图像制导飞行器延时补偿方法及系统,该专利是在飞行器上设置有捷联导引头、制导滤波器、自动驾驶仪和角速率陀螺;这些设计需要飞行器自身具有足够的载荷能力;同时,其延时补偿方法运算量较大,对机载计算机性能要求较高,功耗较大;不适用于小型无人机的导航控制。2022年2月发表于动力学与控制学报的文章公开了一种基于视觉延时补偿的无人机室内实时导航系统,对视觉数据进行了补偿以及将补偿后的视觉数据与imu数据进行了融合,虽然该技术提高了定位精度和实时性,但是并未涉及到详细的飞行控制策略,不适于无人机自主精确着陆。
技术实现要素:
4.本发明的目的:针对上述现有技术,本发明要解决的技术问题是提供一种无人机自主降落延时补偿控制方法,可以解决无人机末端降落过程中位置反复振荡的问题,提高降落快速性,提高着陆成功率。
5.本发明的技术方案:为解决上述技术问题,本发明提出的一种无人机自主降落延时补偿控制方法,包括以下步骤:
6.步骤s1:获取无人机机载传感器采样时刻、输出时刻,解算模块输入、输出时刻,控制指令传输过程输入、输出时刻,从而得到整个过程延时时长;
7.步骤s2:采用分段近似累加的方式,对无人机延时阶段位置进行计算;
8.步骤s3:对无人机移动目标位置进行修正;
9.步骤s4:依据修正后的目标位置,结合规则库,确定无人机移动的速度和加速度。
10.进一步的,步骤s1中,可以采用时间戳或建模的方法获取各环节的延时时长。
11.进一步的,步骤s1中,所述机载传感器至少包括摄像头、超声波传感器、激光测距传感器。
12.进一步的,步骤s1中,整个过程延时时长为获取的各个环节延时时长累积结果。
13.进一步的,步骤s2中,补偿过程是:
14.首先、分析无人机机载传感器采样频率、飞控计算机的控制频率以及运算过程的
信号时序,绘制时序图;
15.然后、根据时序图得到无人机控制信号的实际延时时长;
16.继而、计算延时阶段无人机的位移。
17.进一步的,延时阶段无人机的位移的计算方法是:
[0018][0019][0020]
公式中,dx是延时过程无人机x轴方向移动距离,dy是延时过程无人机y轴方向移动距离,n是延时期间的分段数,v
xi
是无人机x轴方向速度,v
yi
是无人机y轴方向速度,a
xi
是无人机x轴方向加速度,a
yi
是无人机y轴方向加速度,δti是时间间隔。
[0021]
进一步的,步骤s3中,具体修正过程是:
[0022]
x
new
=x
ori-dx,dx是延时过程无人机x方向移动距离,x
ori
是原横轴位置,x
new
是新的横轴位置;
[0023]ynew
=y
ori-dy,dy是延时过程无人机y方向移动距离,y
ori
是原纵轴位置,y
new
是新纵轴位置。
[0024]
进一步的,确定无人机移动的速度和加速度时,需要根据无人机着陆过程中不同高度和位置偏差对应不同的速度和加速度。
[0025]
进一步的,所述规则库建立方法是:首先根据无人机的最终控制效果,确定控制参数;然后,选择影响控制参数的变量作为规则库的输入变量,控制参数作为规则库的输出变量;继而,确定控制参数和控制变量的论域;最后,建立模糊控制规则表,即为规则库。具体的,可以以水平位置偏差和高度偏差构建二维模糊规则库。
[0026]
确定论域时,根据试飞数据,结合经验总结得到。
[0027]
本发明的有益效果:本发明的一种无人机自主降落延时补偿控制方法,能有效解决无人机自主降落过程中延时带来的位置振荡、降落缓慢的问题。
[0028]
使用该位置补偿方法,可以修正延时阶段无人机的位置偏移,为位置控制提供了基础。
[0029]
模糊控制策略较好的抑制了超调,减小了无人机降落过程中水平位置的振荡,缩短了降落时间。
[0030]
本发明提出的控制方法,运算量小,对机载计算机性能要求较低,功耗小,对飞行器载荷能力要求低,特别适用于小型无人机的着陆控制。
附图说明
[0031]
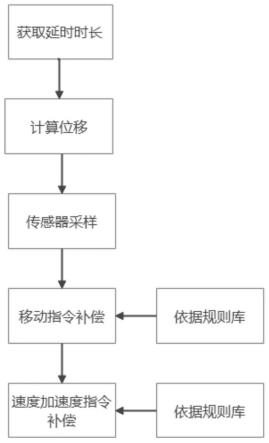
图1为本发明所提方法的实现流程图;
[0032]
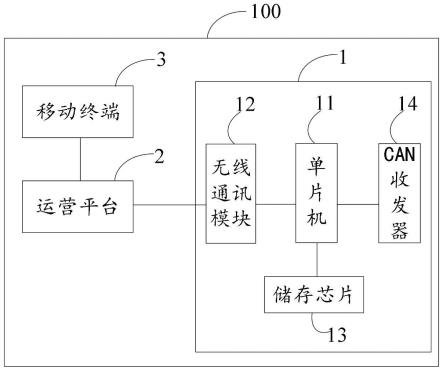
图2为本发明所提无人机的系统框图;
[0033]
图3为本发明所提方法的时序图;
[0034]
图4为补偿前实际外场飞行仿真结果;
[0035]
图5为采用本发明补偿后仿真结果。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
以下结合说明书附图对本发明进行详细陈述,以某型无人机着陆控制为例,
[0038]
对延时阶段位置漂移进行补偿方式,采用模糊控制算法消除位置反复振荡,具体执行过程如图1所示,首先获取无人机机载传感器采样时刻、输出时刻,解算模块输入、输出时刻,控制指令传输过程输入、输出时刻,从而得到整个过程延时时长;然后采用分段近似累加的方式,对无人机延时阶段位置进行计算;继而对无人机移动目标位置进行修正;最后依据修正后的目标位置,结合规则库,确定无人机移动的速度和加速度。
[0039]
具体执行过如下:
[0040]
第一步、延时时长估计
[0041]
如图2所示,表示各部件连接关系和信号流向,在系统运行过程中,图像采集、目标识别、飞控状态采集(滤波)、节点间通讯、控制延时(机载计算机计算)、指令回传等各个环节均会产生延时。基于ros系统,采用时间戳技术记录每个环节数据包发出的时间和数据包收到的时间,最终得到各个环节总延时约400ms。
[0042]
第二步、目标位置补偿
[0043]
机载摄像头进行图像采集并转换到图像坐标系,再转换到机体坐标系,而后输出,图像解算输出的频率是4hz,机载计算机给飞控发送板外控制信号的频率是20hz,所以飞控实际接收到的有效信号频率是4hz。飞控在接收到下一次板外控制信号之前,无人机按照上一次收到的控制信号飞行。
[0044]
第一次控制指令无延时,第二次控制指令延时200ms,第三次控制指令开始延时400ms。
[0045]
x
new
=x
ori-dx,dx是延时过程无人机x方向移动距离,x
ori
是原横轴位置,x
new
是新的横轴位置;
[0046]ynew
=y
ori-dy,dy是延时过程无人机y方向移动距离,y
ori
是原纵轴位置,y
new
是新纵轴位置。
[0047]
延时阶段无人机的位移的计算方法是:
[0048][0049][0050]
公式中,dx是延时过程无人机x轴方向移动距离,dy是延时过程无人机y轴方向移动距离,n是延时期间的分段数,v
xi
是无人机x轴方向速度,v
yi
是无人机y轴方向速度,a
xi
是无人机x轴方向加速度,a
yi
是无人机y轴方向加速度,δti是时间间隔。
[0051]
第三步、模糊控制策略
[0052]
在末端精确降落过程中,控制量速度v和加速度a的确定主要依赖水平偏差δl和高度偏差δh,采用二维模糊控制器,选用水平偏差δl和高度偏差δh作为输入变量,控制
量速度v和加速度a为输出控制量。水平偏差δl的模糊集论域为{nb,nm,ns,zo,ps,pm,pb},高度偏差δh的模糊集论域为{zo,ps,pm,pb},控制量速度v的论域为{nb,nm,ns,zo,ps,pm,pb},控制量加速度a的论域为{nb,nm,ns,zo,ps,pm,pb},具体见表1参数论域和语言定义,其中nb表示负大、nm表示负中、ns表示负小、zo表示零、ps表示正小、pm表示正中、pb表示正大。
[0053]
表1参数论域和语言定义
[0054]
参数论域语言定义δl[-2,2]{nb,nm,ns,zo,ps,pmδh[0,5]{zo,ps,pm,pb}v[-2,2]{nb,nm,ns,zo,ps,pma[-1,1]{nb,nm,ns,zo,ps,pm
[0055]
δl论域的具体取值为[-2,-1,-0.5,0,0.5,1,2],δh=h-h
set
,δh论域的具体取值为[0,0.2,2.5,5],
[0056]
表2速度模糊控制规则表
[0057][0058]
表3加速度a模糊控制规则表
[0059][0060]
结果对比分析
[0061]
本发明在前期做了大量未进行位置补偿的外场飞行试验,选取其中一次比较典型的飞行结果,如图4所示,记录了x,y,z三轴的变化趋势,整个末端精确降落过程用时约40
秒;降落时间长,水平位置反复震荡。
[0062]
如图5所示,在matlab/simulink中实现位置补偿和模糊控制策略后的仿真结果,整个末端精确降落过程用时约15秒;相对于未补偿时,降落用时减少约60%,位置控制精准,无明显位置振荡,控制效果更优。
[0063]
本发明的突出特点表现在:
[0064]
(1)使用该位置补偿方法,可以修正延时阶段无人机的位置偏移,为位置控制提供了基础。
[0065]
(2)模糊控制策略较好的抑制了超调,减小了无人机降落过程中水平位置的振荡,缩短了降落时间。
[0066]
以上所述,仅为本发明的具体实施例,对本发明进行详细描述,未详尽部分为常规技术。但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。